5. 在Debian上使用modbus协议¶
平台:野火imx6ull开发板
系统:Debian
modbus协议库:libmodbus
5.1. modbus协议简介¶
modbus协议是应用于电子控制器上的一种通用协议,通过modbus,控制器相互之间可以相互通信,此外控制器还可以通过网络、总线和其它设备之间可以通信。自1979年以来,modbus已成为一种通用工业标准协议了,在工业的产品上,大多都会使用很多modbus协议去通信,它是一个应用程序层消息传递协议,它提供了在不同类型的总线或网络上连接的设备之间的 从机/主机模型 的通信。
modbus定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。它描述了一个控制器请求访问其它设备的过程,如何回应来自其它设备的请求,以及怎样侦测错误并记录。它制定了消息域格局和内容的公共格式。当在同一modbus网络上通信时,modbus决定了每个控制器需要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。如果需要回应,控制器将生成反馈信息并用modbus协议发出。在其它网络上,包含了modbus协议的消息转换为在此网络上使用的帧或包结构。这种转换也扩展了根据具体的网络解决节地址、路由路径及错误检测的方法。
modbus协议支持传统的RS-232、RS-422、RS-485和以太网设备。许多工业设备,包括PLC,DCS,智能仪表等都在使用modbus协议作为他们之间的通信标准。
更多modbus协议的介绍我们可以去官网提供的协议文档 http://www.modbus.org/specs.php 了解一下。
5.2. libmodbus简介¶
libmodbus是一个与使用modbus协议的设备进行数据 发送/接收 的库,它包含各种后端(backends)通过不同网络进行通信(例如,RTU模式下的串口、485总线或TCP / IPv6中的以太网)。libmodbus还提供了较低通信层的抽象,并在所有支持的平台上提供相同的API。
libmodbus是开源的,它遵循 LGPL v2.1 开源协议,这个协议没有GPL协议那么严格,简单来说,只要你不修改libmodbus库里面的东西(只调用、链接该库),你是可以闭源你的代码的,你也可以用于商业用途,这是非常好的。
更多libmodbus相关的结束可以在github上查看:https://github.com/stephane/libmodbus。
5.3. 测试485总线¶
5.3.1. 使用ssh连接开发板¶
为了更方便后续的其他操作,我们可以通过ssh登陆开发板,这样子就可以打开多个终端,具体的操作参考: https://tutorial.linux.doc.embedfire.com/zh_CN/latest/linux_basis/fire-config_brief.html?highlight=ssh#fire-configssh
5.3.2. 更新¶
为了确保我们安装的软件包的版本是最新版本,让我们使用apt命令更新本地apt包索引和升级系统:
sudo apt-get update
sudo apt-get -y upgrade
5.3.3. 手动安装相关的依赖包¶
这些依赖包是这次测试libmodbus必须的,要安装一下。
sudo apt-get -y install git
sudo apt-get -y install make
sudo apt-get -y install gcc
sudo apt-get -y install autoconf
sudo apt-get -y install libtool
5.3.4. 简单测试485总线功能¶
我们要验证一下我们板子上的485总线是可以正常工作的,因为在后续我们会使用485总线去验证libmodbus工作是否正常,毕竟磨刀不误砍柴工,现在验证好了,后续出现问题就排除硬件的问题了。
验证内核的版本,确保是最新的内核版本,输入以下命令,保证固件的版本是3.5以上的版本,如果不是则更新野火最新发布的镜像。
➜ ~ dmesg | grep sdma
[ 1.167359] imx-sdma 20ec000.sdma: loaded firmware 3.5
首先使用下面命令将CAN总线关闭,打开两个485总线,打开CAN1与CAN2:
sudo fire-config
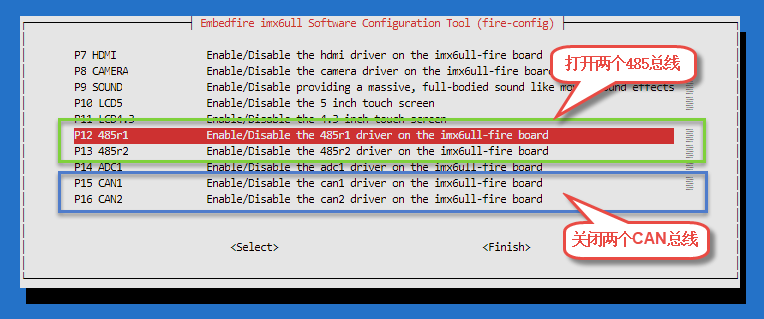
modbus001.png¶
将开发板中484总线的跳帽连接上(在开发板的左上角区域),接着将485接口安卓下图所示的方法对接,485-1的A端与485-2的A端对接,485-1的B端与485-2的B端对接。
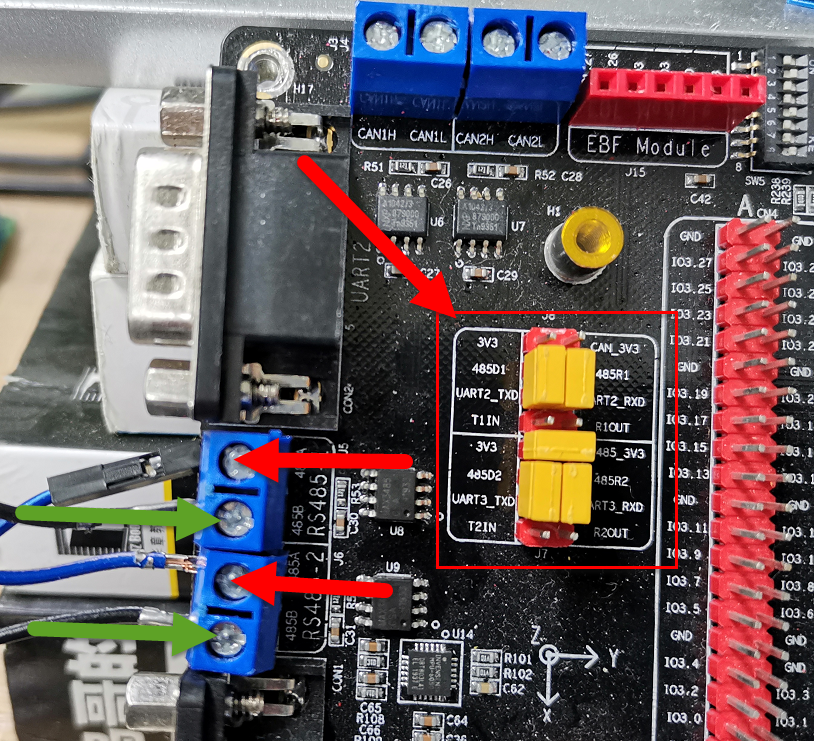
modbus002.png¶
重启开发板。
使用以下命令查看是否存在485总线设备,如果存在ttymxc1和ttymxc2则表示打开总线成功。
➜ ~ ls /dev | grep ttymxc
ttymxc0
ttymxc1
ttymxc2
测试使用485,首先打开一个终端,输入以下命令,它是去读取485-1设备的输入内容:
cat /dev/ttymxc1
再次打开另一个终端,输入以下命令,往485-2设备发送一些数据,看看485-1设备能否接收到,如果接收到,则会在485-1设备的终端打印出来,注意要打开新的终端。
ececho "66666666666666" > /dev/ttymxc2
如果你的485-1设备的终端打印处接收到的数据,那么表示测试成功,如果没有则表示测试失败,无法进行后续的实验,请升级Debian镜像。
5.4. 在Debian上使用libmodbus¶
5.4.1. 拉取libmodbus仓库¶
接着到github拉取这个仓库,仓库非常小,下载下来是很快的,注意,这里也需要拉取到两个开发板上。
git clone https://github.com/Embedfire/libmodbus.git
当然也可以从野火的gitee仓库下载。
git clone https://gitee.com/Embedfire/libmodbus.git
5.4.2. 编译¶
拉取下来后看到本地有libmodbus文件夹,我们进去libmodbus目录下,运行它提供的脚本,它主要是自动生成一些用于配置的文件:
./autogen.sh
等运行完毕后,接着运行configure去配置编译相关的信息,直接运行即可。
./configure
# 最后产生的一些配置相关的信息
libmodbus 3.1.6
===============
prefix: /usr/local
sysconfdir: ${prefix}/etc
libdir: ${exec_prefix}/lib
includedir: ${prefix}/include
compiler: gcc
cflags: -g -O2
ldflags:
documentation: no
tests: yes
在上一步运行完毕后,你会发现当前目录下有Makefile文件,我们使用make命令编译即可:
make
在编译完成后,进入test目录下你会发现有很多可执行的文件,比如我们稍后要运行的程序unit-test-server、unit-test-client:
➜ libmodbus git:(master) cd tests
➜ tests git:(master) ls
LICENSE bandwidth-client.o random-test-client unit-test-client unit-test.h.in
Makefile bandwidth-server-many-up random-test-client.c unit-test-client.c unit-tests.sh
Makefile.am bandwidth-server-many-up.c random-test-client.o unit-test-client.o version
Makefile.in bandwidth-server-many-up.o random-test-server unit-test-server version.c
README.md bandwidth-server-one random-test-server.c unit-test-server.c version.o
bandwidth-client bandwidth-server-one.c random-test-server.o unit-test-server.o
bandwidth-client.c bandwidth-server-one.o stamp-h2 unit-test.h
5.4.3. 运行¶
我们在一个终端中运行以下命令:
./unit-test-server rtu
然后在另一个终端运行下面命令:
./unit-test-client rtu
可以看到libmodbus是能正常运行的,而rtu是什么我们在后续讲解,客户端的现象如下:
Opening /dev/ttymxc2 at 115200 bauds (N, 8, 1)
** UNIT TESTING **
1/1 No response timeout modification on connect: OK
TEST WRITE/READ:
[11][05][01][30][FF][00][8F][59]
Waiting for a confirmation...
<11><05><01><30><FF><00><8F><59>
1/2 modbus_write_bit: OK
[11][01][01][30][00][01][FE][A9]
Waiting for a confirmation...
<11><01><01><01><94><88>
2/2 modbus_read_bits: OK
OK
[11][0F][01][30][00][25][05][CD][6B][B2][0E][1B][CC][C1]
Waiting for a confirmation...
<11><0F><01><30><00><25><97><73>
1/2 modbus_write_bits: OK
[11][01][01][30][00][25][FE][B2]
Waiting for a confirmation...
<11><01><05><CD><6B><B2><0E><1B><45><E6>
2/2 modbus_read_bits: OK
OK
OK
OK
OK
OK
OK
[11][02][01][C4][00][16][BB][55]
Waiting for a confirmation...
<11><02><03><AC><DB><35><20><18>
1/1 modbus_read_input_bits: OK
OK
OK
OK
OK
···
···
5.5. 简单介绍一下代码¶
我们打开unit-test-client.c代码文件,该文件在test目录下,由于太长我就不放出来了,简单介绍一下相关的代码即可。
5.5.1. 初始化modbus结构¶
实现在main函数中,大约在85行的位置,它有2个比较重要的函数,分别是modbus_new_tcp、modbus_new_rtu,他们是用于初始化modbus环境的,在后续的所有的操作都会通过它们创建出来的modbus结构,具体如下:
if (use_backend == TCP) {
ctx = modbus_new_tcp("127.0.0.1", 1502);
} else if (use_backend == TCP_PI) {
ctx = modbus_new_tcp_pi("::1", "1502");
} else {
ctx = modbus_new_rtu("/dev/ttymxc2", 115200, 'N', 8, 1);
}
modbus_new_tcp函数表示创建一个libmodbus的实例,它的后端通过TCP/IPv4网络进行通信,指定了IP地址与端口号。
那么它的后端操作函数如下:
const modbus_backend_t _modbus_tcp_backend = {
_MODBUS_BACKEND_TYPE_TCP,
_MODBUS_TCP_HEADER_LENGTH,
_MODBUS_TCP_CHECKSUM_LENGTH,
MODBUS_TCP_MAX_ADU_LENGTH,
_modbus_set_slave,
_modbus_tcp_build_request_basis,
_modbus_tcp_build_response_basis,
_modbus_tcp_prepare_response_tid,
_modbus_tcp_send_msg_pre,
_modbus_tcp_send,
_modbus_tcp_receive,
_modbus_tcp_recv,
_modbus_tcp_check_integrity,
_modbus_tcp_pre_check_confirmation,
_modbus_tcp_connect,
_modbus_tcp_close,
_modbus_tcp_flush,
_modbus_tcp_select,
_modbus_tcp_free
};
modbus_new_rtu函数表示创建一个libmodbus的实例,会生成并初始化一个modbus的结构体来在串行线路中使用RTU模式进行通讯。它的后端通过串口(可以是485、/232等)进行通信,指定了串口设备、波特率、是否有奇偶校验、指定数据的位数、停止位等。
它的后端操作函数如下:
const modbus_backend_t _modbus_rtu_backend = {
_MODBUS_BACKEND_TYPE_RTU,
_MODBUS_RTU_HEADER_LENGTH,
_MODBUS_RTU_CHECKSUM_LENGTH,
MODBUS_RTU_MAX_ADU_LENGTH,
_modbus_set_slave,
_modbus_rtu_build_request_basis,
_modbus_rtu_build_response_basis,
_modbus_rtu_prepare_response_tid,
_modbus_rtu_send_msg_pre,
_modbus_rtu_send,
_modbus_rtu_receive,
_modbus_rtu_recv,
_modbus_rtu_check_integrity,
_modbus_rtu_pre_check_confirmation,
_modbus_rtu_connect,
_modbus_rtu_close,
_modbus_rtu_flush,
_modbus_rtu_select,
_modbus_rtu_free
};
5.5.2. 设置串口模式¶
一般来说可以通过以下函数设置串口的模式。
int modbus_rtu_set_serial_mode(modbus_t *ctx, int mode);
mode: 填入 MODBUS_RTU_RS232 或 MODBUS_RTU_RS485
返回值:如果成功, 函数应返回0。否则, 它将返回 -1 并设置 errno 。
这个函数的内部会调用 ioctl ()。
5.5.3. 设置RTS模式¶
设置发送请求模式用于在RS485串行总线上进行通讯,默认模式为MODBUS_RTU_RTS_NONE,在把数据写入线路之前不会有信号发出。如果你指定为485模式的话,那么可能会设置一下RST模式,它会对485芯片做读写的控制,默认的控制函数是 modbus rtu_ioctl_rts(), 用户也可以手动指定它,当然啦,野火底层驱动已经实现了在读写的时候自动控制了,不需要设置也可以。
int modbus_rtu_set_rts(modbus_t *ctx, int mode);
要启用RTS模式, 必须使用 MODBUS_RTU_RTS_UP 或 MODBUS_RTU_RTS_DOWN, 这些模式启用 RTS 模式并同时设置极性。使用MODBUS_RTU_RTS_UP时, 将RTS 标志位置为使能并进行 ioctl 调用, 然后在1毫秒的延迟后在总线上写入数据, 然后将 RTS 标志位置为非使能进行另一个 ioctl 调用, 并再次延迟1毫秒。MODBUS_RTU_RTS_DOWN模式与之类似, 但使用相反的 RTS 标志位。
如果成功, 函数应返回0。否则,它将返回 -1 设置 errno 。
5.5.4. 自定义RTS实现¶
设置传输前后设置RST PIN要调用的自定义函数,默认情况下,默认情况下,设置为使用 ioctl 调用切换RTS PIN的内部函数。
前面就说了RST默认的控制函数是 modbus rtu_ioctl_rts(),用户也可以手动指定它,就是通过以下函数去实现的,它运行的位置是与驱动打交道的,所以要配合驱动去处理。
注意,该函数遵循RTS模式,必须使用值MODBUS_RTU_RTS_UP或MODBUS_RTU_RTS_DOWN来调用该函数。
int modbus_rtu_set_custom_rts(modbus_t *ctx, void (set_rts) (modbus_t ctx, int on));
5.5.5. 建立连接¶
使用参数给定的modbus信息,建立与主机、网络或总线的连接,主要是通过modbus结构的后端的connect处理,默认调用的是_modbus_rtu_connect函数。
int modbus_connect(modbus_t *ctx);
5.5.7. 写一位数据¶
向设备写ON或者OFF状态,就是一位数据,addr指定了(远程)设备的地址。
int modbus_write_bit(modbus_t *ctx, int addr, int status);
5.5.9. 写多位数据¶
它的命名很有意思,多了个s,它将指定 nb 位的数据写到远程设备中,src数组必须包含要写入的字节。
int modbus_write_bits(modbus_t *ctx, int addr, int nb, const uint8_t *src);
5.5.10. 读多位数据¶
int modbus_read_bits(modbus_t *ctx, int addr, int nb, uint8_t *dest)
5.5.11. 写多个寄存器¶
用于将src数组中的内容写到远程设备addr地址处的一组nb个寄存器。
int modbus_write_registers(modbus_t *ctx, int addr, int nb, const uint16_t *src)
5.5.12. 读多个寄存器¶
读取远程设备的保持寄存器,并将数据放入dest数组。
int modbus_read_registers(modbus_t *ctx, int addr, int nb, uint16_t *dest)
5.5.13. 读写操作寄存器¶
从src数组向远程设备写入多个寄存器,以及从远程设备向dest阵列读取多个寄存器并存储到dest数组。
int modbus_write_and_read_registers(modbus_t *ctx,
int write_addr, int write_nb,
const uint16_t *src,
int read_addr, int read_nb,
uint16_t *dest)
5.5.14. 发送原始请求¶
通过在ctx环境下的描述符(串口设备或者是socket)发送请求,此函数只用于调试,这个函数只会添加到消息、所选后端的报头或者CRC,, 因此raw_req必须启动并包含至少一个从站/单元的ID和一个函数代码。此函数可用于发送未由库处理的请求。
int modbus_send_raw_request(modbus_t *ctx, uint8_t *raw_req, int raw_req_length);
5.5.15. 收到确认请求¶
这个函数与modbus_send_raw_request是对应的,也是用来调试的,发出去的信息要看看对方有没有收到,将确认请求存储于rsp中,并在成功是返回响应长度,如果忽略指示请求,返回的请求长度可以是0(例如,在RTU模式下对另一个从机slave的查询)。否则返回-1并设置errno。
int modbus_receive_confirmation(modbus_t *ctx, uint8_t *rsp);
更多相关的信息请看对应的源代码。
本章完