12. UART—串口通讯¶
本章参考资料:《IMX6ULRM》(参考手册)。
学习本章时,配合《IMX6ULRM》Chapter 53 Universal Asynchronous Receiver/Transmitter (UART)一起阅读,效果会更佳,特别是涉及到寄存器说明的部分。
本章主要内容:
串口通信协议,物理层和协议层介绍。
i.MX 6U的UART及功能框图。
UART1收发实验。
12.1. 串口通讯协议简介¶
串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,大部分电子设备都支持该通讯方式, 电子工程师在调试设备时也经常使用该通讯方式输出调试信息。
在计算机科学里,大部分复杂的问题都可以通过分层来简化。如芯片被分为内核层和片上外设;官方SDK库则是在寄存器与用户代码之间的软件层。对于通讯协议,我们也以分层的方式来理解,最基本的是把它分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输。协议层主要规定 通讯逻辑,统一收发双方的数据打包、解包标准。简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。
下面我们分别对串口通讯协议的物理层及协议层进行讲解。
12.1.1. 物理层¶
串口通讯的物理层有很多标准及变种,我们主要讲解RS-232标准 ,RS-232标准主要规定了信号的用途、通讯接口以及信号的电平标准。
使用RS-232标准的串口设备间常见的通讯结构如下图所示。
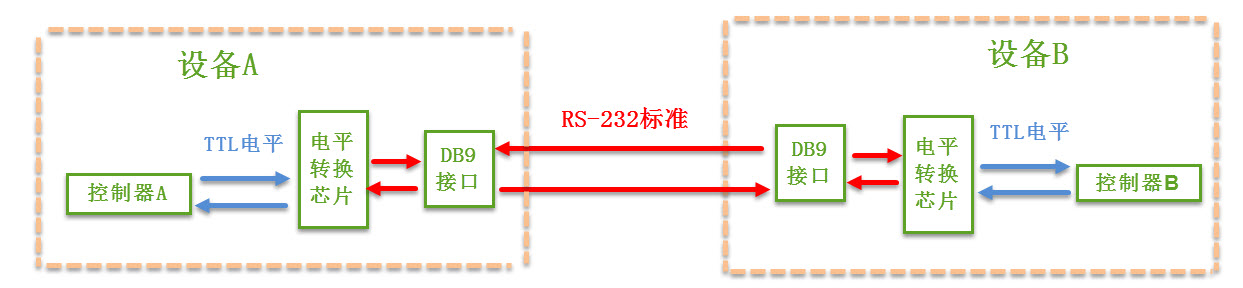
在上面的通讯方式中,两个通讯设备的“DB9接口”之间通过串口信号线建立起连接,串口信号线中使用“RS-232标准”传输数据信号。由于RS-232电平标准的信号不能直接被控制器直接识别,所以这些信号会经过一个“电平转换芯片”转换成控制器能识别的“TTL校准”的电平信号,才能实现通讯。
12.1.1.1. 电平标准¶
根据通讯使用的电平标准不同,串口通讯可分为TTL标准及RS-232标准,如下表所示。
表 TTL电平标准与RS232电平标准
通讯标准 |
电平标准(发送端) |
|---|---|
5V TTL |
逻辑1:2.4V-5V 逻辑0:0~0.5V |
RS-232 |
逻辑1:-15V~-3V 逻辑0:+3V~+15V |
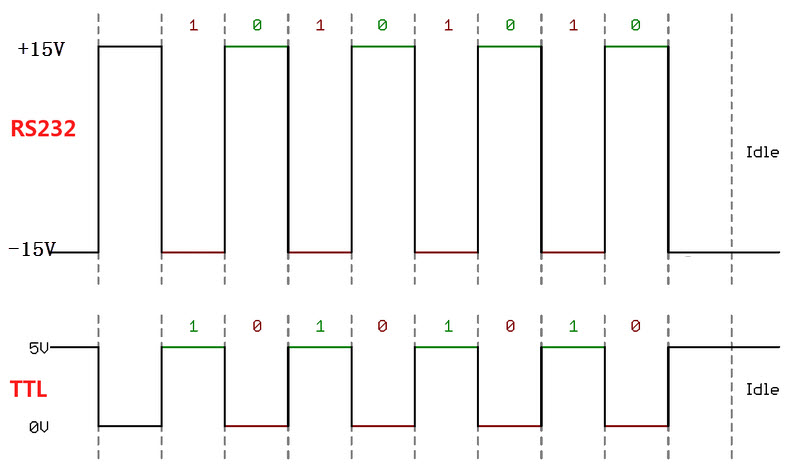
我们知道常见的电子电路中常使用TTL的电平标准,理想状态下,使用5V表示二进制逻辑1,使用0V表示逻辑0;而为了增加串口通讯的远距离传输及抗干扰能力,它使用-15V表示逻辑1,+15V表示逻辑0。使用RS232与TTL电平校准表示同一个信号时的对比如下图所示。
因为控制器一般使用TTL电平标准,所以常常会使用MA3232芯片对TTL及RS-232电平的信号进行互相转换。
12.1.1.2. RS-232信号线¶
在最初的应用中,RS-232串口标准常用于计算机、路由与调制调解器(MODEN,俗称“猫”)之间的通讯, 在这种通讯系统中,设备被分为数据终端设备DTE(计算机、路由)和数据通讯设备DCE(调制调解器)。 我们以这种通讯模型讲解它们的信号线连接方式及各个信号线的作用。
在旧式的台式计算机中一般会有RS-232标准的COM口(也称DB9接口),如下图所示。

其中接线口以针式引出信号线的称为公头,以孔式引出信号线的称为母头。在计算机中一般引出公头接口,而在调制调解器设备中引出的一般为母头,使用上图中的串口线即可把它与计算机连接起来。通讯时,串口线中传输的信号就是使用前面讲解的RS-232标准调制的。
在这种应用场合下,DB9接口中的公头及母头的各个引脚的标准信号线接如下图所示。
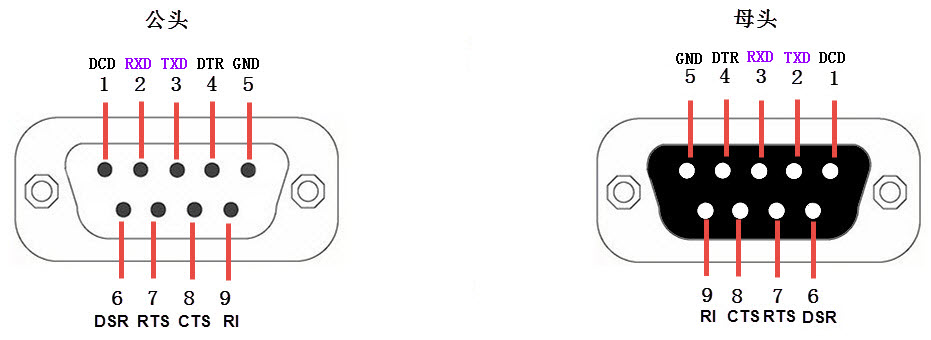
表 DB9信号线说明(公头,为方便理解,可把DTE理解为计算机,DCE理解为调制调解器)
序号 |
名称 |
符号 |
数据方向 |
说明 |
|---|---|---|---|---|
1 |
载波检测 |
DCD |
DTEDCE |
Data Carrier Detect,数据载波检测,用于DTE告知对方,本机是否收到对方的载波信号 |
2 |
接收数据 |
RXD |
DTEDCE |
Receive Data,数据接收信号,即输入 。 |
3 |
发送数据 |
TXD |
DTEDCE |
Transmit Data,数据发送信号,即输出。两个设备之间的TXD与RXD应交叉相连 |
4 |
数据终端 (DTE) 就绪 |
DTR |
DTEDCE |
Data Terminal Ready,数据终端就绪,用于DTE向对方告知本机是否已准备好 |
5 |
信号地 |
GND |
地线,两个通讯设备之间的地电位可能不一样,这会影响收发双方的电平信号,所以两个串口设备之间必须要使用地线连接,即共地。 |
|
6 |
数据设备(DCE)就绪 |
DSR |
DTEDCE |
Data Set Ready,数据发送就绪,用于DCE告知对方本机是否处于待命状态 |
7 |
请求发送 |
RTS |
DTEDCE |
Request To Send,请求发送, DTE 请求 DCE 本设备向DCE端发送数据 |
8 |
允许发送 |
CTS |
DTEDCE |
Clear To Send,允许发送,DCE回应对方的RTS发送请求,告知对方是否可以发送数据 |
9 |
响铃指示 |
RI |
DTEDCE |
Ring Indicator,响铃指示,表示DCE端与线路已接通 |
上表中的是计算机端的DB9公头标准接法,由于两个通讯设备之间的收发信号(RXD与TXD)应交叉相连,所以调制调解器端的DB9母头的收发信号接法一般与公头的相反,两个设备之间连接时,只要使用“直通型”的串口线连接起来即可,见下图。
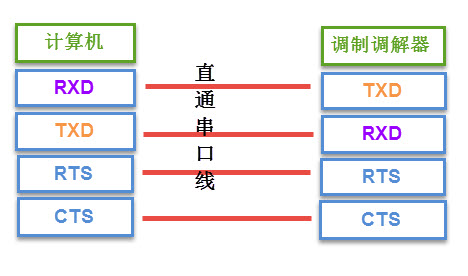
串口线中的RTS、CTS、DSR、DTR及DCD信号,使用逻辑1表示信号有效,逻辑0表示信号无效。 例如,当计算机端控制DTR信号线表示为逻辑1时,它是为了告知远端的调制调解器,本机已准备好接收数据,0则表示还没准备就绪。
在目前的其它工业控制使用的串口通讯中,一般只使用RXD、TXD以及GND三条信号线,直接传输数据信号。 而RTS、CTS、DSR、DTR及DCD信号都被裁剪掉了,如果您在前面被这些信号弄得晕头转向,那就直接忽略它们吧。
12.1.2. 协议层¶
串口通讯的数据包由发送设备通过自身的TXD接口传输到接收设备的RXD接口。在串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据,其组成如下图所示。

12.1.2.1. 波特率¶
本章中主要讲解的是串口异步通讯,异步通讯中由于没有时钟信号(如前面讲解的DB9接口中是没有时钟信号的), 所以两个通讯设备之间需要约定好波特率,即每个码元的长度,以便对信号进行解码, 上图中用虚线分开的每一格就是代表一个码元。常见的波特率为4800、9600、115200等。
12.1.2.2. 通讯的起始和停止信号¶
串口通讯的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑0的数据位表示, 而数据包的停止信号可由0.5、1、1.5或2个逻辑1的数据位表示,只要双方约定一致即可。
12.1.2.3. 有效数据¶
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为5、6、7或8位长。
12.1.2.4. 数据校验¶
在有效数据之后,有一个可选的数据校验位。由于数据通信相对更容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。 校验方法有奇校验(odd)、偶校验(even)、0校验(space)、1校验(mark)以及无校验(noparity), 它们介绍如下:
奇校验要求有效数据和校验位中“1”的个数为奇数,比如一个8位长的有效数据为:01101001,此时总共有4个“1”, 为达到奇校验效果,校验位为“1”,最后传输的数据将是8位的有效数据加上1位的校验位总共9位。
偶校验与奇校验要求刚好相反,要求帧数据和校验位中“1”的个数为偶数,比如数据帧:11001010,此时数据帧“1”的个数为4个,所以偶校验位为“0”。
0校验是不管有效数据中的内容是什么,校验位总为“0”,1校验是校验位总为“1”。
在无校验的情况下,数据包中不包含校验位。
12.2. i.MX 6U的UART简介¶
i.MX 6U芯片具有多达8个UART外设用于串口通讯,UART是在USART基础上裁剪掉了同步通信功能,只支持异步通信。 简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是UART。
UART满足外部设备对工业标准NRZ异步串行数据格式的要求,并且使用了小数波特率发生器,可以提供多种波特率,使得它的应 用更加广泛。UART支持异步单向通信和半双工单线通信;还支持局域互连网络LIN、智能卡(SmartCard)协议与lrDA(红外线数据协会) SIR ENDEC规范。
i.MX 6U的UART 主要特性如下。
兼容高速TIA/EIA-232-F,最高5.0 Mbit/s
兼容IrDA 串行低速红外接口,最高115.2 Kbit/s
支持9位或多点(Multidrop mode)模式(RS-485)(自动从地址检测)
支持7位或8位RS-232格式或9位的RS-485格式
支持1或2位停止位。
可编程奇校验或偶校验。
支持硬件流控(CTS/RTS)
RTS支持边缘中断检测。
自动波特率检测(最高为115.2kbit/s)
rx_data输入和tx_data输出可分别在rs-232/rs-485模式下进行交换(软件可交换TX、RX引脚)。
两个DMA请求(TxFIFODMA请求和RxFIFODMA请求)。
支持软件复位 (Srst_B)
两个独立的32输入FIFO,用于发送和接收。
12.3. UART功能框图¶
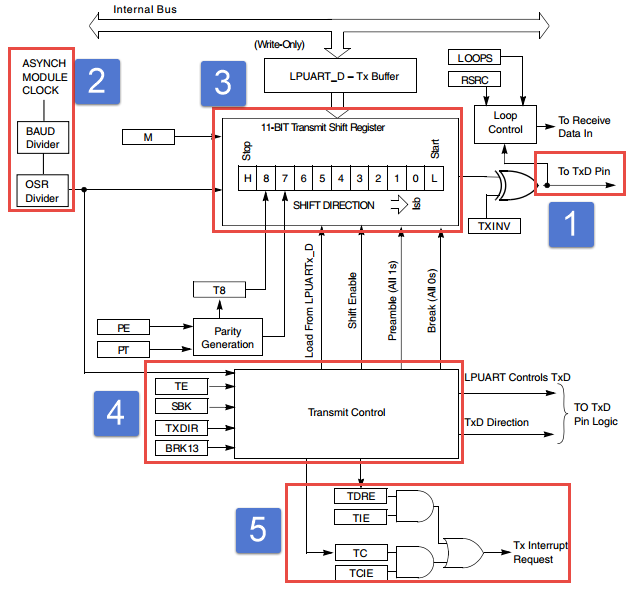
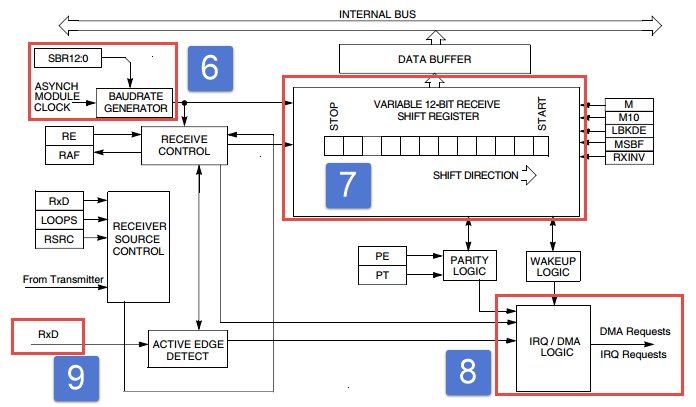
i.MX 6U的UART功能框图包含了UART最核心内容,掌握了功能框图,对UART就有一个整体的把握,在编程时就思路就非常清晰,如下图所示。
12.3.1. 通信引脚¶
UART模块通过RxD与TxD与外界通信,如果使用硬件流控还会用到CTS和RTS,以UART1为例,可用的外部输出引脚如表格所示, 其他UART对应的外部引脚请参考《IMX6ULRM》(参考手册)External Signals and Pin Multiplexing章节。
表 UART1引脚
LPUART1_TX |
GPIO1_IO02 |
|---|---|
UART1_TX_DATA |
|
LPUART1_RX |
GPIO1_IO03 |
UART1_RX_DATA |
|
LPUART1_CTS_B |
GPIO1_IO06 |
UART1_CTS_B |
|
LPUART1_RTS_B |
GPIO1_IO07 |
UART1_RTS_B |
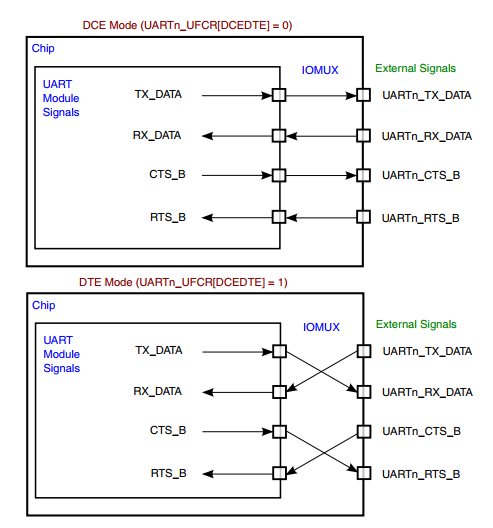
相比STM32, i.MX 6U的串口增加了引脚交换功能。通过配置UFCR[DCEDTE]寄存器可以交换TX、RX引脚以及CTS、RTS引脚,如下图所示。
12.3.2. 串口时钟与波特率¶
如标号②处所示,串口模块共有两个时钟输入Peripheral Clock和Model Clock 。这两个时钟介绍如下:
Peripheral Clock直译为外部时钟,这个时钟主要用于读、写接收和发送的数据,例如读接收FIFO、写发送FIFO。 这个时钟与波特率设置无关,如果没有特殊需求我们将这个时钟保持默认即可,在初始代码中并没有特意设置这个时钟。
Mode clock直译为模块时钟,它既可用于接收、发送数据也用于设置波特率,这个时钟决定了串口最高支持的波特率。 下面重点讲解Mode clock时钟设置以及波特率的设置。
Mode clock时钟产生过程在55.4 设置系统时钟实验有过介绍,这里再次简单说明。 Mode clock时钟来自根时钟UART_CLK_ROOT,根时钟的设置要参考时钟树(CCM章节有过详细介绍),从时钟树中截取UART_CLK_ROOT部分,如下图所示。
UART的发送器和接收器使用相同的波特率。计算公式如下:
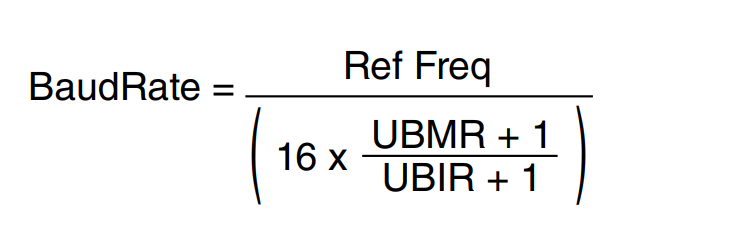
公式说明如下:
BaudRate,要设置的波特率。
Ref Freq,参考时钟,这个时钟是Mode clock经过RFDIV寄存器分频后得到的频率。
UBMR,UBMR寄存器值。
UBIR,UBIR 寄存器值。
设置波特率需要设置三个寄存器,分别为RFDIV时钟分频寄存器、UBMR、UBIR。我们假设目标波特率为115200,介绍如下:
1、设置时钟分频寄存器RFDIV,得到参考时钟Ref Freq。
Ref Freq时钟应该被设置为多少,没有一个准确的数字,本章配套程序遵守以下几条,
第一 ,Ref Freq时钟要大于波特率的16倍(依据是module_clock必须大于等于16倍波特率(参考《IMX6ULRM》(参考手册)53.4.2.1 Clock requirements,而module_clock经过Clock Gating & Divider之后变为ref_clk,从功能框图看ref_clk最终作为uart模块参考时钟)。
第二,UBMR和UBIR的值必须小于 0xFFFF。
注:本人在官方手册中并没有找到Ref Freq必须大于等于16倍波特率的说明,本教程将Ref Freq时钟大于16倍波特率,并且UBMR大于UBIR。
module_clock时钟经过UARTx_UFCR[RFDIV]寄存器分频后得到Ref Freq时钟,如下图所示。
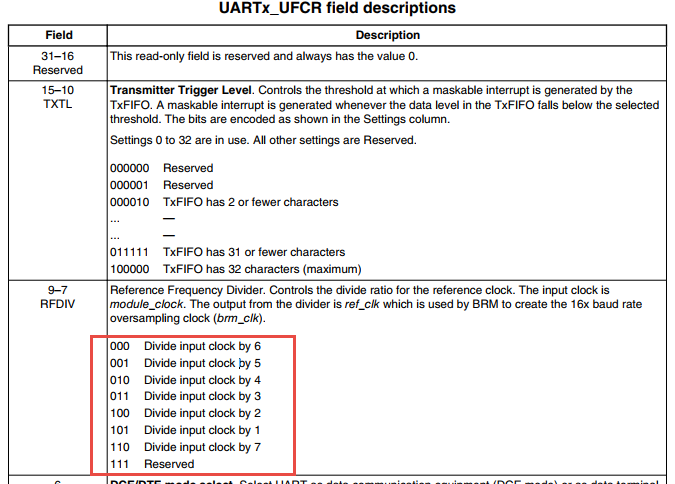
在程序中Mode clock被设置为40MHz而波特率只有115200,所以这里将分频值设置为最大值7,即UARTx_UFCR[RFDIV] = 110B。 得到参考时钟Ref Freq = 40 / 7 = 5.71MHz。
2、计算UBMR和UBIR的值。我们已知波特率 115200,参考时钟Ref Freq = 5.71MHz,可以计算得到(UBMR+1)/ (UBIR+1) 约为 3.10。 我们设置(UBIR+1) = 10,(UBMR+1) = 31 。
12.3.3. 接收、发送FIFO¶
Tx Block与Rx Block 包括三部分,控制单元Control 、电源管理单元 Power Saving以及TxFIFO (和RxFIFO)。其中控制单元可以认为控制整个串口的工作, 我们编写软件不必过多关心,重点介绍TxFIFO和RxFIFO
TxFIFO与RxFIFO大小均为32字节,以发送为例,数据通过UTXD寄存器自动写入TxFIFO,如果TxFIFO没有满,则可以不断将数据写入UTXD寄存器。UTS[4]寄存器是TxFIFO满的标志位。如果关闭了发送,仍然可以向TxFIFO写入数据,但这样做将会产生传输错误信息。当TxFIFO中的 数据发送完成后将会自动设置发送缓冲区空中断标志位,向TxFIFO写入数据将自动清除发送缓冲区空标志位。
12.3.4. DMA和中断请求¶
每个串口有两个DMA请求,txfifo dma请求和rxfifo dma请求,有多个中断请求。 我们这里只介绍几个常用的中断,完整内容请参考《IMX6ULRM》(参考手册)53.4.1 Interrupts and DMA Requests。
表 常用中断举例
中断事件 |
使能位 |
标志位 |
|---|---|---|
空闲中断 |
UARTx_UCR1[TRDYEN] |
UARTx_USR2[TXFE] |
接收溢出中断 |
UARTx_UCR4[OREN] |
UARTx_USR2[ORE] |
接收缓冲区非空中断 |
UARTx_UCR4[DREN] |
UARTx_USR2[RDR] |
12.3.5. 外围总线¶
我们程序中对UART相关寄存器的读、写都是通过外围总线实现的。我们程序中几乎不会修改这部分内容。
12.4. UART1收发实验¶
UART只需两根信号线即可完成双向通信,对硬件要求低,使得很多模块都预留UART接口来实现与其他模块或者控制器进行数据传输,比如GSM模块,WIFI模块、蓝牙模块等等。在硬件设计时,注意还需要一根”共地线”。
我们经常使用UART来实现控制器与电脑之间的数据传输。这使得我们调试程序非常方便,比如我们可以把一些变量的值、函数的返回值、寄存器标志位等等通过UART发送到串口调试助手,这样我们可以非常清楚程序的运行状态,当我们正式发布程序时再把这些调试信息去除即可。
12.4.1. 硬件原理图¶
为利用UART实现开发板与电脑通信,需要用到一个USB转UART的IC,我们选择CH340G芯片来实现这个功能, CH340G是一个USB总线的转接芯片,实现USB转UART、USB转IrDA红外或者USB转打印机接口,我们使用其USB转UART功能。 具体电路设计如下图所示。
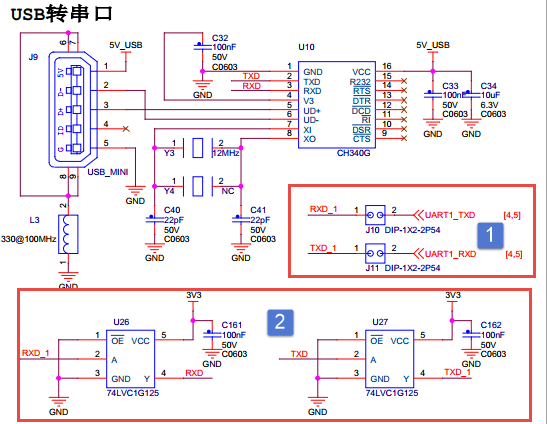
为了提高系统更加稳定和安全,还增加了隔离保护电路,上图标号②所示。隔离保护电路有74LVC1G125逻辑芯片实现, 74LVC1G125的真值表与逻辑图如下图所示。
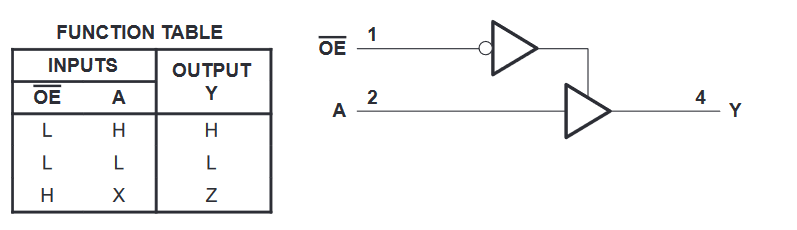
结合上图不难看出,A端输入电平与Y端输出相同。串口Tx和Rx信号经过74LVC1G125芯片之后输出到CH340G芯片并由CH340G进行转换最终输出到外部电路。
12.4.2. 实验代码讲解¶
本章的示例代码目录为:base_code/bare_metal/uart
野火裸机下载工具download_tool路径为:base_code/bare_metal/download-tool/download-tool.tar.bz2
12.4.2.1. 编程思路¶
本章配套程序由时钟章节的程序修改得到,主要增加了uart相关代码。这里只讲解核心的部分代码,有些变量的设置,头文件的包含等并没有涉及到,完整的代码请参考本章配套的工程。
定义串口引脚以及引脚PAD属性。
串口初始化函数。
串口接收,发送函数的实现。
修改makefile文件。
12.4.2.2. 代码分析¶
首先复制”base_code/bare_metal/clock_init”代码并更名为”base_code/bare_metal/uart”。 在”base_code/bare_metal/uart/device”文件夹下添加uart.c和uart.h文件。 串口相关代码将会放到uart.c和uart.h文件内。
12.4.2.2.1. 定义串口引脚以及引脚PAD属性¶
串口引脚依然按照RGB灯引脚定义方式,如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 | /**********************第一部分, 定义串口使用的引脚*******************/
/*定义 UART1 RX 引脚*/
#define UART1_RX_GPIO GPIO1
#define UART1_RX_GPIO_PIN (17U)
#define UART1_RX_IOMUXC IOMUXC_UART1_RX_DATA_UART1_RX
/*定义 UART1 TX 引脚*/
#define UART1_TX_GPIO GPIO1
#define UART1_TX_GPIO_PIN (16U)
#define UART1_TX_IOMUXC IOMUXC_UART1_TX_DATA_UART1_TX
/**********************第二部分, 定义串口使用的引脚*******************/
/*******************************************************************************
* uart引脚配置
******************************************************************************/
#define UART_RX_PAD_CONFIG_DATA (SRE_0_SLOW_SLEW_RATE| \
DSE_6_R0_6| \
SPEED_1_MEDIUM_100MHz| \
ODE_0_OPEN_DRAIN_DISABLED| \
PKE_1_PULL_KEEPER_ENABLED| \
PUE_1_PULL_SELECTED| \
PUS_3_22K_OHM_PULL_UP| \
HYS_0_HYSTERESIS_DISABLED)
/* 配置说明 : */
/* 转换速率: 转换速率慢
驱动强度: R0/6
带宽配置 : medium(100MHz)
开漏配置: 关闭
拉/保持器配置: 使能
拉/保持器选择: 上下拉
上拉/下拉选择: 22K欧姆上拉(选择了保持器此配置无效)
滞回器配置: 禁止 */
#define UART_TX_PAD_CONFIG_DATA (SRE_0_SLOW_SLEW_RATE| \
DSE_6_R0_6| \
SPEED_1_MEDIUM_100MHz| \
ODE_0_OPEN_DRAIN_DISABLED| \
PKE_1_PULL_KEEPER_ENABLED| \
PUE_0_KEEPER_SELECTED| \
PUS_3_22K_OHM_PULL_UP| \
HYS_0_HYSTERESIS_DISABLED)
/* 配置说明 : */
/* 转换速率: 转换速率慢
驱动强度: R0/6
带宽配置 : medium(100MHz)
开漏配置: 关闭
拉/保持器配置: 使能
拉/保持器选择: 保持器
上拉/下拉选择: 22K欧姆上拉(选择了保持器此配置无效)
滞回器配置: 禁止 */
|
代码分为两部分,第一部分定义了引脚所在组、引脚编号、引脚的复用功能。第二部分定义了TX 和RX引脚的pad属性,其他串口也适用这些配置。
12.4.2.2.2. 串口初始化函数¶
串口初始化配置了多个寄存器,结合代码和《IMX6ULRM》(参考手册)53.15 UART Memory Map/Register Definition章节可 以查看寄存器的详细介绍。读者也不必花太多时间在这些寄存器,在需要时能够找到即可。初始化函数如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 | void uart_init(void)
{
/**********************第一部分********************/
/*时钟初始化,设置 UART 根时钟,并设置为40MHz*/
CCM->CSCDR1 &= ~(0x01 << 6); //设置UART选择 PLL3 / 6 = 80MHz
CCM->CSCDR1 &= ~(0x3F); //清零
//设置串口根时钟分频值为1,UART根时钟频率为:80M / (dev + 1) = 40MHz
CCM->CSCDR1 |= (0x01 << 0);
/**********************第二部分********************/
/*开启 UART1 的时钟*/
CCM_CCGR5_CG12(0x3); //开启UART1的时钟
UART1->UCR1 &= ~UART_UCR1_UARTEN_MASK; //禁用 UART1
/*软件复位*/
UART1->UCR2 &= ~UART_UCR2_SRST_MASK;
while ((UART1->UCR2 & UART_UCR2_SRST_MASK) == 0)
{
}
/**********************第三部分********************/
UART1->UCR1 = 0x0;
UART1->UCR2 = UART_UCR2_SRST_MASK;
UART1->UCR3 = UART_UCR3_DSR_MASK | UART_UCR3_DCD_MASK | UART_UCR3_RI_MASK;
UART1->UCR4 = UART_UCR4_CTSTL(32);
UART1->UFCR = UART_UFCR_TXTL(2) | UART_UFCR_RXTL(1);
UART1->UESC = UART_UESC_ESC_CHAR(0x2B);
UART1->UTIM = 0x0;
UART1->ONEMS = 0x0;
UART1->UTS = UART_UTS_TXEMPTY_MASK | UART_UTS_RXEMPTY_MASK;
UART1->UMCR = 0x0;
/**********************第四部分********************/
/*引脚初始化*/
IOMUXC_SetPinMux(UART1_RX_IOMUXC, 0);
IOMUXC_SetPinConfig(UART1_RX_IOMUXC, UART_RX_PAD_CONFIG_DATA);
IOMUXC_SetPinMux(UART1_TX_IOMUXC, 0);
IOMUXC_SetPinConfig(UART1_TX_IOMUXC, UART_TX_PAD_CONFIG_DATA);
/**********************第五部分********************/
/*******uart初始化******/
/*设置控制寄存器到默认值*/
UART1->UCR2 |= (1 << 5); //8位数宽度
UART1->UCR2 &= ~(1 << 6); //一位停止位
UART1->UCR2 &= ~(1 << 8); //禁用奇偶校验位
UART1->UCR2 |= (1 << 2); //使能发送
UART1->UCR2 |= (1 << 1); //使能接收
UART1->UCR2 |= (1 << 14); //忽略流控
/**********************第六部分********************/
/* For imx family device, UARTs are used in mode,
so that this bit should always be set.*/
UART1->UCR3 |= UART_UCR3_RXDMUXSEL_MASK;
UART1->UFCR = \
(UART1->UFCR & ~UART_UFCR_TXTL_MASK) | UART_UFCR_TXTL(1); //设置发送FIFO 阀值
UART1->UFCR = \
(UART1->UFCR & ~UART_UFCR_TXTL_MASK) | UART_UFCR_TXTL(1); //设置接收FIFO 阀值
UART1->UCR1 &= ~UART_UCR1_ADBR_MASK; //禁用可变波特率
// UART1->UCR1 |= UART_UCR1_ADBR_MASK;
/**********************第七部分********************/
/*波特率设置方式 1 。 使用官方SDK设置波特率函数*/
// UART_SetBaudRate(UART1, 115200, 40000000);
/*波特率设置方式 2 。 手动计算,填入寄存器*/
/*设置串口波特率
* Ref Freq时钟 40MHz
* UFCR RFDIV 110 0x06 7分频 5.714MHz
* BaudRate 115200bps
* UBMR 31-1 = 0x09
* UBIR 10-1 = 0x1E
*/
UART1->UFCR &= ~(0x07 << 7); //清零分频值
UART1->UFCR |= (0x06 << 7); //设置分频值,40MHz /7 = 5.714MHz
UART1->UBIR = 0x09;
UART1->UBMR = 0x1E;
/**********************第八部分********************/
/*开启串口*/
UART1->UCR1 |= UART_UCR1_UARTEN_MASK;
}
|
初始代码较长,但是内容很容易理解,结合代码各部分讲解如下:
第一部分,设置UART根时钟。这部分内容在时钟初 始化章节以及56.3 UART功能框图章节的56.3 2②串口时钟与波特率小节有过详细介绍,这里不再介绍。
第二部分,开启UART1的时钟并复位串口。”CCM_CCGR5_CG12”是一个帮 助宏,设置CCM(时钟控制模块)的CCGR5寄存器的CG12位 ,开启UART1的时钟。这点与stm32很相似。
第三部分,将UART配置寄存器设置为默认值。这部分内容是参考官方SDK相关代码编写的,笔者认为这部分代码可有可无,暂时把它放在这里。
第四部分,初始化uart引脚,引脚初始化与其他外设(按键、RGB灯)的引脚初始化相同,这里不再赘述。
第五部分,配置uart 可stm32类似,将配置参数填入相应的配 置寄存器即可。这里默认设置串口数据宽度为8,一位停止位,禁用奇偶校验,使能发送和接收并关闭硬件流控。
第六部分,这部分设置了三个寄存器,第56行,使能RXD复用输入功能,使用 串口必须设置该位。第57到62行,设置接收FIFO和发FIFO阈值,只有FIFO的数据超过阈值才会产生相应的中断,本章配套例程没有使用中断,所以这里将阈值设置为1即可。第63行,禁用可变波特率。
第七部分,设置串口波特率,修改串口波特率需要同时设 置三个寄存器,分别为UFCR、UBIR、UBMR。需要注意的是程序中要先修改UBIR寄存器,然后再 修改UBMR,这是官方参考手册中规定的,照做即可。寄存器值的计算已经在时钟初始化章节以及56.3 UART功能框图章节的56.32②串口时钟与波 特率小节有过详细介绍,这里不再介绍。另外官方SDK中也给出了设置波特率的函数,我们也可以直接使用如代码第68行所示。具体实现参考本章配套例程。
第八部分,设置UCR1寄存器,开启串口。
12.4.2.2.3. 串口接收函数¶
串口接收函数仅实现简单的接收字符串功能,没有使用中断,具体代码如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | /********************第一部分***********************/
static inline uint8_t UART_ReadByte(UART_Type *base)
{
return (uint8_t)((base->URXD & UART_URXD_RX_DATA_MASK)\
>> UART_URXD_RX_DATA_SHIFT);
}
/********************第二部分***********************/
/*函数功能:串口接收函数
*参数: base,指定串口。data,保存接收到的数据。 length,要接收的数据长度
*
*/
void UART_ReadBlocking(UART_Type *base, uint8_t *data, uint8_t length)
{
while (length--)
{
/* 等待接收完成 */
while (!(base->USR2 & UART_USR2_RDR_MASK))
{
}
/*读取接收到的数据 */
*(data++) = UART_ReadByte(base);
}
}
|
结合代码简单说明如下:
第一部分,定义接收字符函数,函数仅仅返回URXD寄存器的内容。
第二部分,定义接收字符串函数,参数”base”指定用于接收的串 口,参数”data”指定用于保存数据的地址。参数”length”指定读取的字符串 长度。函数实现也很简单,循环调用第一部分的”UART_ReadByte”函数,并在读取之前等待接收完成标志。
12.4.2.2.4. 串口发送函数¶
与接收函数类似,这里仅实现基本的发送功能,发送函数可以自己实现也可以直接复制官方SDK里的发送函数具体代码如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | /********************第一部分***********************/
static inline void UART_WriteByte(UART_Type *base, uint8_t data)
{
base->UTXD = data & UART_UTXD_TX_DATA_MASK;
}
/********************第二部分***********************/
/*
*功能:官方SDK 串口字符串发送函数
*参数说明:
*/
void UART_WriteBlocking(UART_Type *base,const uint8_t *data, uint8_t length)
{
while (length--)
{
/* 判断发送 FIFO 是否可写入(是否已满)*/
while (!(base->USR2 & UART_USR2_TXDC_MASK))
{
}
UART_WriteByte(base, *(data++));
}
}
|
这两个函数是从官方SDK直接复制得到的,功能也很简单,结合代码各部分说明如下:
第一部分,定义字节发送函数。函数实现将字节数据写入到UTXD寄存器。
第二部分,定义字符串发送函数。函数有三个参数”base”指定用于发送的 串口,参数”data”指定用于要发送数据的地址。参数”length”指定发送 长度。在函数中循环调用第一部分的”UART_WriteByte”字节发送函数。第19行 等待发送FIFO可写入,只要FIFO可写入(不关心FIFO中的数据是否发送完成)就立即执行”UART_WriteByte”字节发送函数,通过字节发送函数发送的数据实际是写入FIFO,FIFO中的数据会自动依次执行发送。
12.4.2.2.5. main函数中添加验证代码¶
main函数中实现”发送接收到的数据”功能,代码实现很简单如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | /****************第一部分*****************/
/*提示字符串*/
uint8_t txbuff[] = "Uart polling example\r\nBoard will send back received characters\r\n";
int main()
{
uint8_t ch; //用于暂存串口收到的字符
/****************第二部分*****************/
system_clock_init();
uart_init();
/****************第三部分*****************/
UART_WriteBlocking(UART1, txbuff, sizeof(txbuff) - 1);
/****************第四部分*****************/
while (1)
{
UART_ReadBlocking(UART1, &ch, 1);
UART_WriteBlocking(UART1, &ch, 1);
}
return 0;
}
|
测试代码分为四部分。第一部分,定义提示字符串,程序运行后将会通过串口输出该提示字符串。第二部分,初始化系统时钟和串口。第三部分,调用我们定义的UART_WriteBlocking函数发送提示字符串。第四部分,在while(1)中循环调用UART_ReadBlocking和UART_WriteBloc king循环接收并立即发送接收到的数据。
12.4.3. 实验准备¶
12.4.3.1. 修改makefile¶
修改makefile ,将源文件编译进程序。打开”base_code/bare_metal/uart”目录下的makefile文件,在最终目标依赖项中添加”uart.o”如下所示。
1 2 3 4 5 6 7 8 9 10 11 | all : button.o led.o system_MCIMX6Y2.o clock.o uart.o
arm-none-eabi-ld -r $^ -o device.o
%.o : %.c
arm-none-eabi-gcc ${header_file} -c $^
%.o : %.S
arm-none-eabi-gcc ${header_file} -c $^
clean:
-rm -f *.o *.bak
|
在后面的程序中如果使用官方设置波特率函数或者如果用到了除法、取余等算数运算就需要在链接时指定链接库。打开”base_code/bare_metal/uart”目录下的makefile,在链接指令中指定链接库,如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 | #定义变量,用于保存编译选项和头文件保存路径
header_file := -fno-builtin -I$(shell pwd)/include
/*arm-none-eabi 安装位置*/
libgcc_address := /usr/lib/gcc/arm-none-eabi/6.3.1
export header_file
all : start.o main.o device/device.o
arm-none-eabi-ld -Tbase.lds $^ -o base.elf -static -L $(libgcc_address) -lgcc
arm-none-eabi-objcopy -O binary -S -g base.elf base.bin
...
|
在makefile中增加了两部分内容。
第一部分,代码第5行定义”libgcc_address”变量用于保存”arm-none-eabi”编译工具的安装位置,我们需要的libgcc.a位于该目录下。 如果使用教程中介绍的”sudo apt-get install gcc-arm-none-eabi”安装则默认位于程序中所指目录,如果使用其他方式安装,找到对应的路径填入该变量即可。
第二部分,代码第11行,在链接指令中静态链接libgcc.a库文件。
12.4.3.2. 烧录试验程序¶
程序编写完成后,在“uart” 文件夹下执行make命令,makefile工具便会自动完成程序的编译、链接、格式转换等工作。 正常情况下我们可以在当前目录看到生成的一些中间文件以及我们期待的.bin文件。
12.4.4. 程序运行结果¶
在编译下载官方SDK程序到开发板章节我们详细讲解了如何将二进制文件烧写到SD卡(烧写工具自动实现为二进制文件添加头)。这里再次说明下载步骤。
将一张空SD卡(烧写一定会破坏SD卡中原有数据!!!烧写前请保存好SD卡中的数据),接入电 脑后在虚拟机的右下角状态栏找到对应的SD卡。将其链接到 虚拟机。
进入烧写工具目录,执行”./mkimage.sh <烧写文件路径>”命令,例如 要烧写的led.bin位于home目录下,则烧写命令为”./mkimage.sh /home/led.bin”。
执行上一步后会列出linux下可烧写的磁盘,选择你插入的SD卡即可。这一步非 常危险!!!一定要确定选择的是你插入的SD卡!!,如果选错很可能破坏你电脑磁盘内容,造成数据损坏!!!。确定磁盘后SD卡以”sd”开头,选择”sd”后面的字符即可。例如要烧写的sd卡是”sdb”则输入”b”即可。
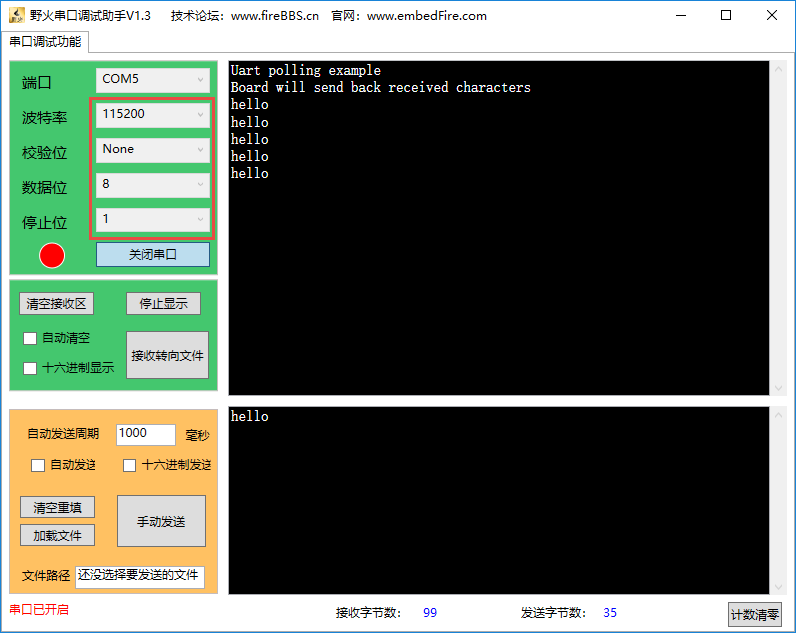
烧写完成,首先将开发板启动方式设置为SD卡启动,将SD卡插入开发板卡槽。使用USB数据线连接电脑和开发板的USB转串口接口,接通电源,打开串口调试助手,正常情况下可以串口调试助手可以收到来自开发板的提示信息,通过串口调试助手发送字符会立即收到发送的字符,串口调试助手的配置信息如下所示。