6. 在Debian中通过Python控制串口¶
平台:野火imx6ull开发板
系统:Debian
目标Python版本:Python3.7
注意:此处的操作是在野火imx6ull开发板上(运行的是Debian系统),而非虚拟机。
6.1. 更新¶
其实在很多Debian系统中都预装了Python3或者Python2,但是野火提供的镜像是并未预装Python3的,我们可以手动安装,为了确保我们的版本是最新版本,让我们使用apt命令更新本地apt包索引和升级系统:
sudo apt-get update
sudo apt-get -y upgrade
-y 标志将确认我们同意所有要安装的项目。
6.2. 手动安装Python3¶
sudo apt-get -y install python3
可以看到Python3有很多依赖的deb包:
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following additional packages will be installed:
libmpdec2 libpython3-stdlib libpython3.7-minimal libpython3.7-stdlib
python3-minimal python3.7 python3.7-minimal
Suggested packages:
python3-doc python3-tk python3-venv python3.7-venv python3.7-doc binutils
binfmt-support
The following NEW packages will be installed:
libmpdec2 libpython3-stdlib libpython3.7-minimal libpython3.7-stdlib python3
python3-minimal python3.7 python3.7-minimal
0 upgraded, 8 newly installed, 0 to remove and 0 not upgraded.
Need to get 4224 kB of archives.
After this operation, 19.6 MB of additional disk space will be used.
当然啦,这些依赖的deb包是不需要我们手动安装的,Debian会自动安装。
在安装完成后,校验是否安装成功:
python3 -V
当出现以下内容时表示Python3安装成功:
Python 3.7.3
6.3. 设置Debian系统的默认Python版本¶
如果你是运行以下命令校验Python的版本:
python -V
并且当你的系统存在Python2的话,那么版本可能就是 Python 2.7.16 ,那么与我们想要安装的Python3版本并不符合,因此我们要设置Python3位默认版本:
cd /usr/bin
sudo rm python
sudo ln -s python3.7 python
cd ~
再次校验Python版本时,发现系统默认的Python版本就是python3.7了:
python3 -V
# 版本
Python 3.7.3
6.4. 安装pip包管理工具¶
接下来我们就讲解怎么去安装对应的包。
pip是一个Python的包管理系统,允许用户安装Python包。使用pip可以从Python包索引(PyPI)和其他存储库安装对应的包。
我们首先还是更新一下apt的索引:
sudo apt-get update
然后安装python3-pip:
sudo apt-get -y install python3-pip
在安装完成后验证一下:
pip3 --version
# 出现以下内容表示安装成功
pip 18.1 from /usr/lib/python3/dist-packages/pip (python 3.7)
6.5. 安装pyserial模块¶
使用pip3安装 pyserial模块 ,它封装了对串口的访问,提供了在Windows,OSX,Linux,BSD(任何POSIX兼容系统)上运行的Python的后端模块,它会选择合适的串口进行数据的输入输出操作,使得我们通过Python操作串口变得非常简单。
pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple pyserial
6.6. pyserial模块介绍¶
本章仅简单介绍一下模块的类,更多信息大家可以去看官方的介绍: https://pythonhosted.org/pyserial/
本章仅简单介绍一下pyserial模块的类 class serial.Serial ,这是我们写代码要用到的。
6.6.1. 初始化参数:¶
__init__(port=None, baudrate=9600, bytesize=EIGHTBITS, parity=PARITY_NONE, stopbits=STOPBITS_ONE, timeout=None, xonxoff=False, rtscts=False, write_timeout=None, dsrdtr=False, inter_byte_timeout=None)
参数说明:
port:指定端口设备名称,取决于操作系统,例如在Linux上为/dev/ttyXXX,在Windows上为COMXXX。
baudrate:波特率,可以是以下标准值之一:50、75、110、134、150、200、300、600、1200、1800、2400、4800、9600、19200、38400、57600、115200等等。
bytesize:数据位数。可取的值:5位,6位,7位,8位。
parity:启用奇偶校验。可取的值:PARITY_NONE,PARITY_EVEN,PARITY_ODD,PARITY_MARK,PARITY_SPACE。
stopbits:停止位数。可取的值:STOPBITS_ONE,STOPBITS_ONE_POINT_FIVE,STOPBITS_TWO。
timeout:设置读取超时值,是浮点类型,表示当没有数据时读取阻塞的时间;如果设置为None,则永远等待,直到接收到请求的字节数;如果设置为0,则表不阻塞,在任何情况下立即返回读取到的数据内容。
xonxoff:启用软件流控制。 - rtscts:启用硬件(RTS / CTS)流控制。
dsrdtr:启用硬件(DSR / DTR)流控制。
write_timeout:设置写超时值,默认情况下write()处于阻塞状态。
inter_byte_timeout:字符间超时,无则禁用(默认)。
ps:这些参数基本都有默认值,但port是必须填写的。
6.6.2. 读数据¶
从串口读取指定长度的字节数据,读取数据时根据初始化参数中指定的超时时间进行判断是否超时。
read(size=1)
参数: - size:要读取的字节数。 - 返回:从端口读取到的数据
6.6.3. 写数据¶
将指定的数据写入串口,但Unicode字符串必须经过编码,例如 'hello'.encode('utf-8') 。
参数: - data:要写入的数据。 - 返回:写入的字节数,如果为端口配置了写超时并且超过了时间,则抛出异常SerialTimeoutException。
6.7. 编写例程代码¶
简单了解之后可以直接使用它,比如我们创建一个 serial_demo.py 文件,并编写相关的代码,代码文件可以在 https://github.com/Embedfire/embed_linux_tutorial/blob/master/base_code/linux_env/serial_demo.py 路径下得到,具体代码如下:
import serial
from time import sleep
def recv(serial):
while True:
data = serial.read_all()
if data != b'' :
break
return data.decode()
if __name__ == '__main__':
serial = serial.Serial('/dev/ttymxc2', 115200) # /dev/ttymxc2
if serial.isOpen() :
print("open success")
else :
print("open failed")
while True:
data =recv(serial)
if data != '' :
print("receive:",data)
serial.write(data.encode()) # 数据回显
6.8. 实验¶
首先使用USB转串口接上开发板的USART3,如果没有USB转串口可以在野火官方淘宝店上购买: 野火 USB转TTL CH340模块 。
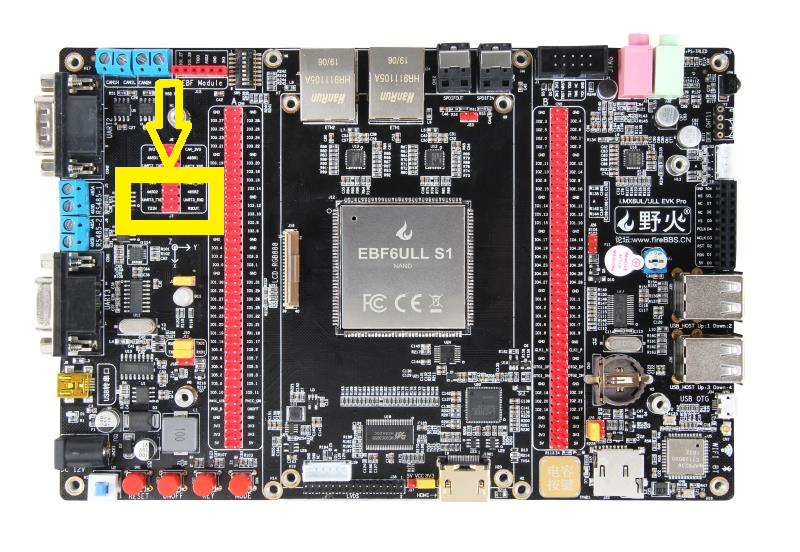
python_serial001.png¶
然后在
fire-config中打开串口3:
sudo fire-config
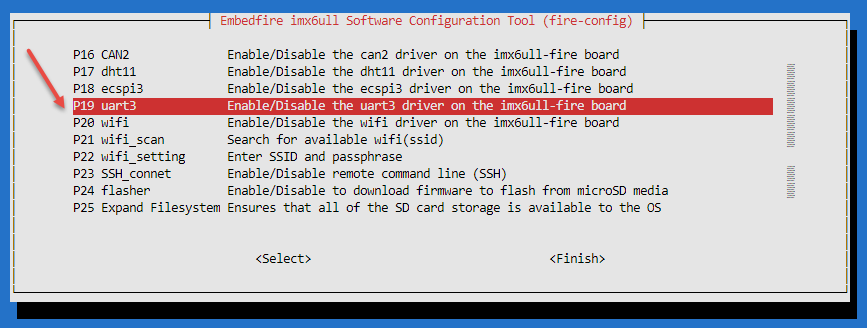
python_serial002.png¶
重启开发板。
查看
/dev目录下是否存在串口3设备ttymxc2
ls /dev | grep ttymxc2
打开野火串口调试助手。
在Debian系统中运行
serial_demo.py文件
python serial_demo.py
程序运行的现象如下:

python_serial003.png¶