
29. GPS¶
目前我们测试使用过的GPS模块型号为BH-ATGM332D模块。
29.1. BH-ATGM332D简介¶
BH-ATGM332D 是野火设计的高性能、低功耗 GPS、北斗双模定位模块。 它采用中科微电子公司的 ATGM332D-5N-31模组方案, 可以通过串口向单片机系统和电脑输出 GPS及北斗定位信息,使用简单方便,其外观见下图。
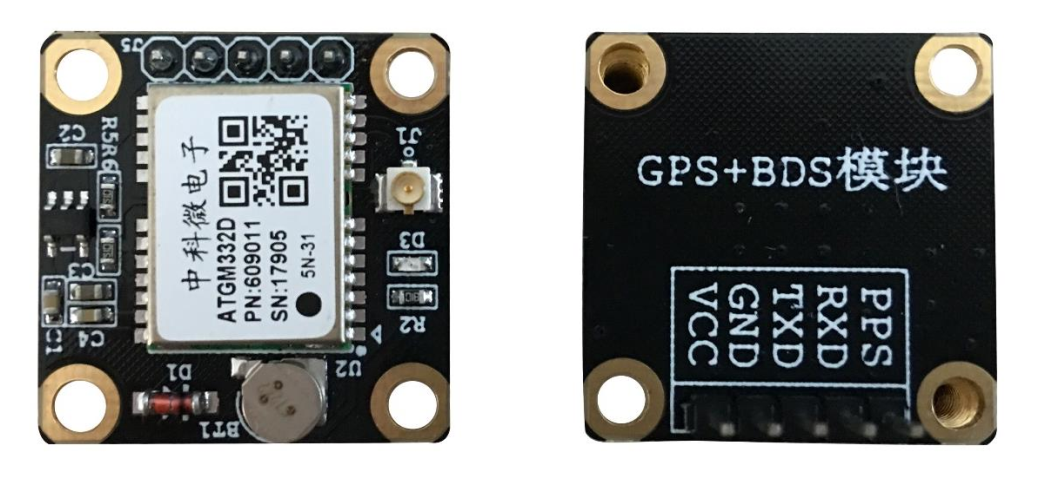
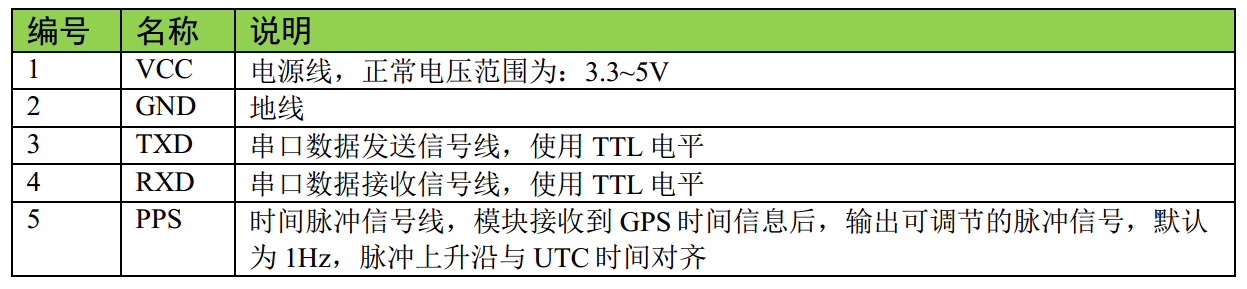
BH-ATGM332D 模块引脚说明如下:
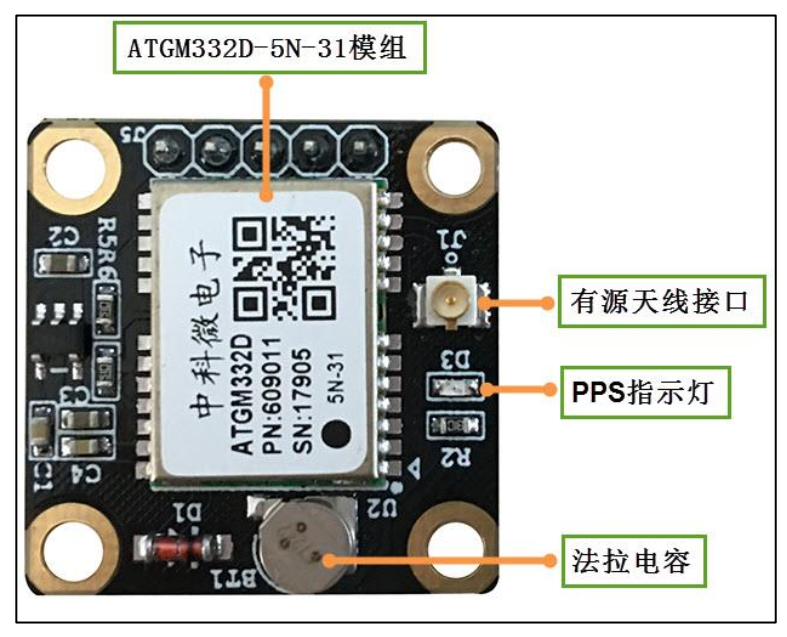
BH-ATGM332D 模块的资源如下:
BH-ATGM332D 模块与其配套的有源天线连接如下:

29.2. 测试 BH-ATGM332D¶
本次实验以LubanCat-1N板卡演示,其他板子的操作和本实验类似,这里就不过多赘述了。测试系统为Debian,Ubuntu也类似。
29.2.1. 硬件接线¶
测试使用的是板卡上8引脚和10引脚的串口。具体对应的串口号可查看40PIN引脚图。
《RK356x系列板卡40PIN引脚图(鲁班猫Zero、1、2)》
鲁班猫1N和GPS模块接线如下:
鲁班猫板卡 -------- GPS模块
5V(4) -------- VCC
GND(6) -------- GND
UART_RX(10) -------- TXD
UART_TX(8) -------- RXD

29.2.2. 使能UART串口¶
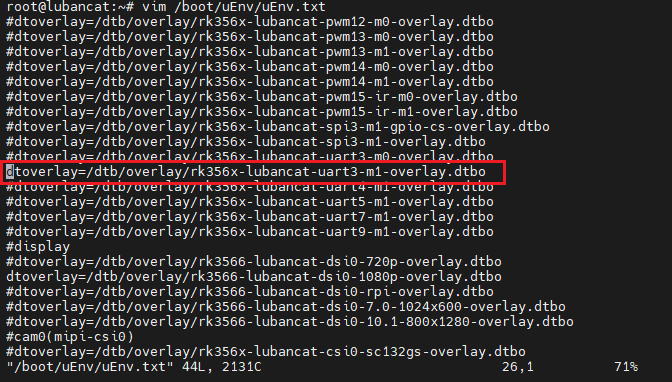
1、通过上述引脚图可知,鲁班猫1N板卡8、10引脚对应的UART3_M1,要使用GPS模块需打开/boot/uEnv.txt文件启用串口3设备树插件。
2、重启鲁班猫板卡。
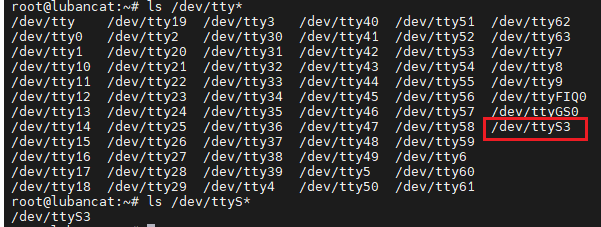
3、重启之后查看dev目录下是否存在刚打开串口设备:
ls /dev/tty*
ls /dev/ttyS*
提示
当存在/dev/ttyS3的时候表示已经打开串口3设备。
29.2.3. 验证模块是否正常工作¶
1、要验证模块是否工作,首先要检查供电是否正常,按照上述硬件接线进行连接,BH-ATGM332D模块的LED灯会亮起。
2、确保模块供电正常后,在终端输入以下命令,监听模块发来的信息。
cat /dev/ttyS3
输出了以下内容,则表示模块正常工作:
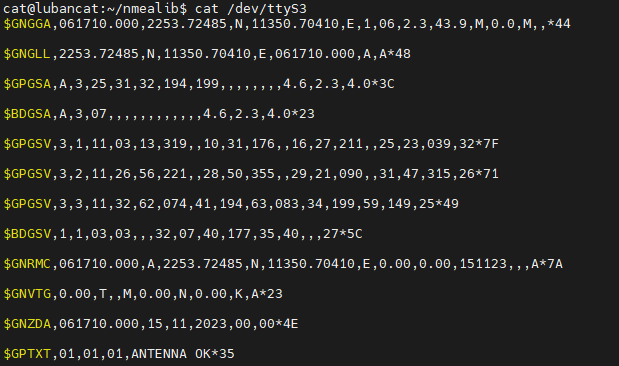
注意看输入的内容 $GPTXT,01,01,01,ANTENNA OK*35 ,它表示模块正常运行,当然也可能是其他情况,比如:
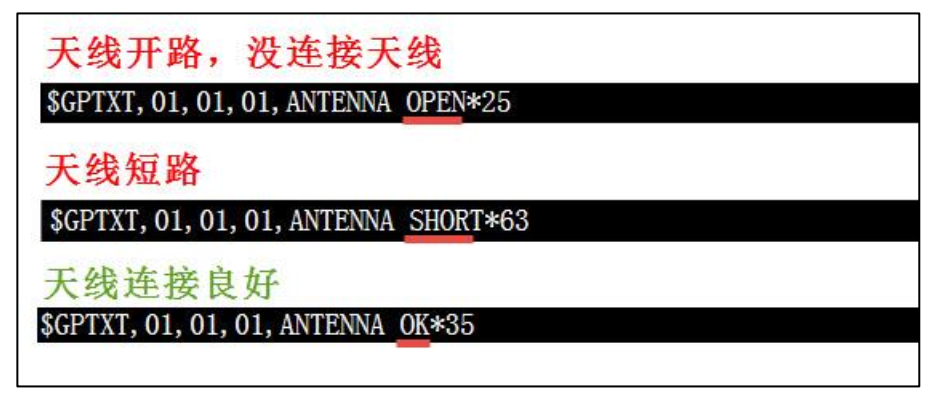
图中的三种状态分别为开路(OPEN) 、 SHORT(短路) 及 OK(正常) , 测试时请确保天线处于 OK 状态。
如果输出的数据如下图所示,表示模块无法搜索到卫星信号。
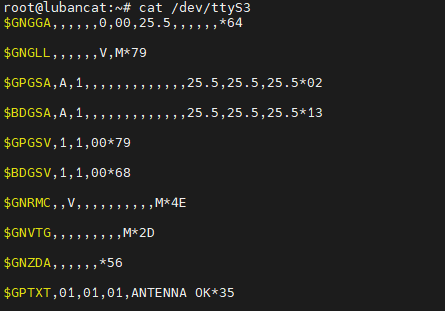
提示
当模块无信号时,应转移一下定位模块天线的位置,一般在室内卫星信号会比较差,可到室外空旷的地方测试(如楼顶、阳台、窗边)。
29.3. NMEA-0183¶
29.3.1. NMEA-0183 协议简介¶
BH-ATGM332D 模块通过 TTL 串口输出定位数据信息,这些信息默认采用 NMEA-0183 4.0 协议, 输出的信息如前面的日志所示。
NMEA 是美国国家海洋电子协会(National Marine Electronics Association )为海用电子设备制定的标准格式,目前已经成为了 GPS 导航设备统一的 RTCM 标准协议, 本模块使用的 NMEA 4.0 版本协议支持 GPS、北斗、海格纳斯等定位系统。NMEA-0183 是一套定义接收机输出的标准信息,有几种不同的格式,每种都是独立相关的 ASCII 格式, 使用逗号隔开数据,数据流长度从 30-100 字符不等,通常以每秒间隔选择输出,最常用的格式为“GGA”,它包含了定位时间,纬度,经度,高度,定位所用的卫星数, DOP 值, 差分状态和校正时段等,其他的有速度,跟踪,日期等。 NMEA 实际上已成为所有的定位接收机中最通用的数据输出格式。
29.3.2. NMEA 解码库¶
了解了 NMEA 格式有之后,我们就可以编写相应的解码程序了,而程序员 Tim(xtimor@gmail.com)提供了一个非常完善的 NMEA 解码库,在以下网址可以下载到:http://nmea.sourceforge.net/ ,直接使用该解码库,可以避免重复发明轮子的工作。 在野火提供的 GPS 模块资料的“NMEA0183 解码库源码”文件夹中也包含了该解码库的源码, 野火提供的 程序就是使用该库来解码 NMEA 语句的。
该解码库目前最新为 0.5.3 版本,它使用纯 C 语言编写,支持 windows、 winCE 、UNIX 平台,支持解析 GPGGA, GPGSA,GPGSV,GPRMC,GPVTG 这五种语句(这五种语句已经提供足够多的 GPS 信息),解析得的 GPS 数据信息以结构体存储,附加了地理学相关功能,可支持导航等数据工作,除了解析 NMEA 语句,它还可以根据随机数产生 NMEA语句,方便模拟。 在该解码库之上, 野火扩展了其对 NMEA-0183 4.0 版本的支持。
29.4. 在鲁班猫上使用 BH-ATGM332D 模块¶
本次实验以LubanCat-1N板卡演示,测试系统为Debian。
29.4.1. 更新软件源列表¶
sudo apt update
29.4.2. 手动安装相关的依赖包¶
sudo apt install git make gcc
29.4.3. 拉取 nmealib 仓库¶
nmealib 仓库已经发布在github与gitee上,野火对改库进行了修改,以支持解析 NMEA-0183 4.0 协议。
从 github 拉取 nmealib 仓库:
git clone https://github.com/Embedfire/nmealib.git
从 gitee 拉取 nmealib 仓库:
git clone https://gitee.com/Embedfire/nmealib.git
29.4.4. 例程分析¶
野火发布的 nmealib 仓库已经提供了相关的demo例程,在samples目录下有5个文件夹,分别是:generate 、 generator 、 math 、parse 、 parse_ebf_module。

他们都对应着不同的例程:
generate/generator |
这两个demo是产生随机 NMEA-0183 标准信息的,可以用来做调试使用。 |
math |
数学库,用来将这些 NMEA-0183 标准信息转换为数学相关的数据,比如经纬度、方位角等。 |
parse |
解析 NMEA-0183 标准信息的demo,这些 NMEA-0183 标准信息信息写在一个数组中。 |
parse_ebf_module |
解析野火北斗定位模块的 NMEA-0183 标准信息的demo,它通过读取串口3设备得到 BH-ATGM332D 的数据,然后调用nmealib库去解析它。 |
29.4.5. 修改演示代码串口号¶
在示例编译运行前,需要先修改代码的串口号。示例代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 | #include <nmea/nmea.h>
#include <string.h>
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <stdint.h>
#include <termios.h>
#include <sys/ioctl.h>
void GMTconvert(nmeaTIME *SourceTime, nmeaTIME *ConvertTime, uint8_t GMT,uint8_t AREA);
void error(const char *str, int str_size)
{
printf("Error: ");
write(1, str, str_size);
printf("\n");
}
int main()
{
int fd;
int len;
nmeaINFO info;
nmeaPARSER parser;
nmeaTIME beiJingTime; //北京时间
double deg_lat;//转换成[degree].[degree]格式的纬度
double deg_lon;//转换成[degree].[degree]格式的经度
char tmp_buf[200];
char buff[4096];
int size, it = 0;
nmeaPOS dpos;
fd = open("/dev/ttymxc2", O_RDONLY);
printf("fopen %d\n", fd);
if(!fd)
return -1;
// nmea_property()->trace_func = &trace;
nmea_property()->error_func = &error;
nmea_zero_INFO(&info);
nmea_parser_init(&parser);
struct termios opt;
//清空串口接收缓冲区
tcflush(fd, TCIOFLUSH);
// 获取串口参数opt
tcgetattr(fd, &opt);
//设置串口输出波特率
cfsetospeed(&opt, B9600);
//设置串口输入波特率
cfsetispeed(&opt, B9600);
//设置数据位数
opt.c_cflag &= ~CSIZE;
opt.c_cflag |= CS8;
//校验位
opt.c_cflag &= ~PARENB;
opt.c_iflag &= ~INPCK;
//设置停止位
opt.c_cflag &= ~CSTOPB;
//更新配置
tcsetattr(fd, TCSANOW, &opt);
while(1)
{
memset(buff, 0, 4096);
size = 0;
len = 0;
nmea_zero_INFO(&info);
nmea_parser_init(&parser);
for(it = 0; it < 32; it++) {
memset(tmp_buf, 0, 100);
size = (int)read(fd, tmp_buf, 100);
if (size > 1) {
memcpy(buff + len, tmp_buf, size);
len += size;
memcpy(buff + len - 1, "\r\n", 2);
len += 1;
}
}
nmea_parse(&parser, buff, len, &info);
// info.lat lon中的格式为[degree][min].[sec/60],使用以下函数转换成[degree].[degree]格式
deg_lat = nmea_ndeg2degree(info.lat);
deg_lon = nmea_ndeg2degree(info.lon);
GMTconvert(&info.utc,&beiJingTime,8,1);
// // /* 输出解码得到的信息 */
printf("\r\n时间:%d-%02d-%02d,%d:%d:%d\r\n", beiJingTime.year+1900, beiJingTime.mon,beiJingTime.day,beiJingTime.hour,beiJingTime.min,beiJingTime.sec);
printf("\r\n纬度:%f,经度%f\r\n",deg_lat,deg_lon);
printf("\r\n海拔高度:%f 米 ", info.elv);
printf("\r\n速度:%f km/h ", info.speed);
printf("\r\n航向:%f 度", info.direction);
printf("\r\n正在使用的GPS卫星:%d,可见GPS卫星:%d",info.satinfo.inuse,info.satinfo.inview);
printf("\r\n正在使用的北斗卫星:%d,可见北斗卫星:%d",info.satinfo.inuse,info.satinfo.inview);
printf("\r\nPDOP:%f,HDOP:%f,VDOP:%f\n",info.PDOP,info.HDOP,info.VDOP);
}
nmea_parser_destroy(&parser);
close(fd);
return 0;
}
|
提示
实例的代码比较简单,主要流程是从串口3设备读取数据,读取数据的流程基本如下:open打开设备, 配置读取信息的参数,如波特率、停止位、校验位等,然后read读取数据,缓存到一个buff中; 然后调用nmea_parse() 函数去解析数据,并将其打印出来。
我们需要将代码的第40行内容:
fd = open("/dev/ttymxc2", O_RDONLY);
修改成当前使用的串口,如下:
fd = open("/dev/ttyS3", O_RDONLY);
可以用vim、nano等文本编辑器进行修改,如果是桌面版镜像也可以用gedit。当然也可以用VSCode SSH远程登录板卡来修改。
提示
关于用VSCode远程登录板卡,可以参考 《vscode便捷调试开发》
29.4.6. 编译 & 运行¶
进入nmealib目录下,直接运行 make 命令去编译,编译信息如下所示。
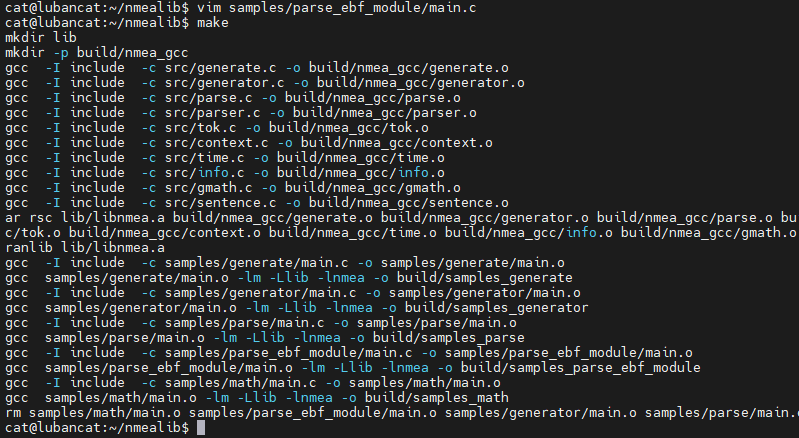
可以看到编译生成了libnmea.a库文件,并且将所有的samples都编译了,输出的结果在 build/ 目录下,生成了对应的可执行文件。我们直接运行:
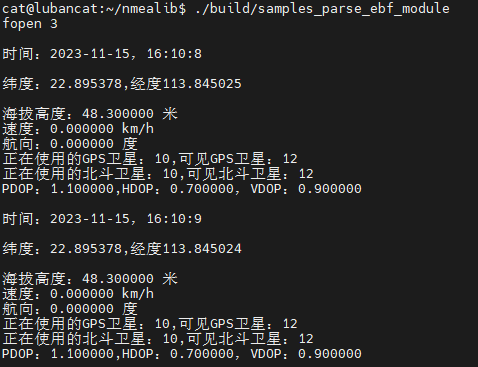
./build/samples_parse_ebf_module
提示
运行后,窗口会打印时间、经纬度等信息,因为天线此时正平放着,所以速度和航向数据都为0。
29.5. nmea库的简单介绍¶
上面的代码用到了nmea库的很多数据结构,所以要介绍一下相关的知识:
29.5.1. 结构体 nmeaPARSER 和 nmeaINFO¶
上述参数中的 parser 及 info 变量的数据类型 nmeaPARSER 和 nmeaINFO 则是 NMEA解码库特有的数据结构,具体如下:
1 2 3 4 5 6 7 8 9 | typedef struct _nmeaPARSER
{
void *top_node;
void *end_node;
unsigned char *buffer;
int buff_size;
int buff_use;
} nmeaPARSER;
|
提示
可以看到, nmeaPARSER 是一个链表,在解码时, NMEA 库会把输入的 GPS 原始数据压入到 nmeaPARSER 结构的链表中,便于对数据管理及解码。在使用该结构前, 需要调用了 nmea_parser_init() 函数分配动态空间,而解码结束时,调用了 nmea_parser_destroy() 函数释放分配的空间。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 | typedef struct _nmeaINFO
{
int smask; /**< Mask specifying types of packages from which data have been obtained */
nmeaTIME utc; /**< UTC of position */
int sig; /**< GPS quality indicator (0 = Invalid; 1 = Fix; 2 = Differential, 3 = Sensitive) */
int fix; /**< Operating mode, used for navigation (1 = Fix not available; 2 = 2D; 3 = 3D) */
double PDOP; /**< Position Dilution Of Precision */
double HDOP; /**< Horizontal Dilution Of Precision */
double VDOP; /**< Vertical Dilution Of Precision */
double lat; /**< Latitude in NDEG - +/-[degree][min].[sec/60] */
double lon; /**< Longitude in NDEG - +/-[degree][min].[sec/60] */
double elv; /**< Antenna altitude above/below mean sea level (geoid) in meters */
double sog; /**< 数值 对地速度,单位为节 */
double speed; /**< Speed over the ground in kilometers/hour */
double direction; /**< Track angle in degrees True */
double declination; /**< Magnetic variation degrees (Easterly var. subtracts from true course) */
char mode; /**< 字符 定位模式标志 (A = 自主模式, D = 差分模式, E = 估算模式, N = 数据无效) */
nmeaSATINFO satinfo; /**< satellites information */
nmeaSATINFO BDsatinfo; /**北斗卫星信息*/
int txt_level;
char *txt;
} nmeaINFO;
|
其结构体的说明如下:
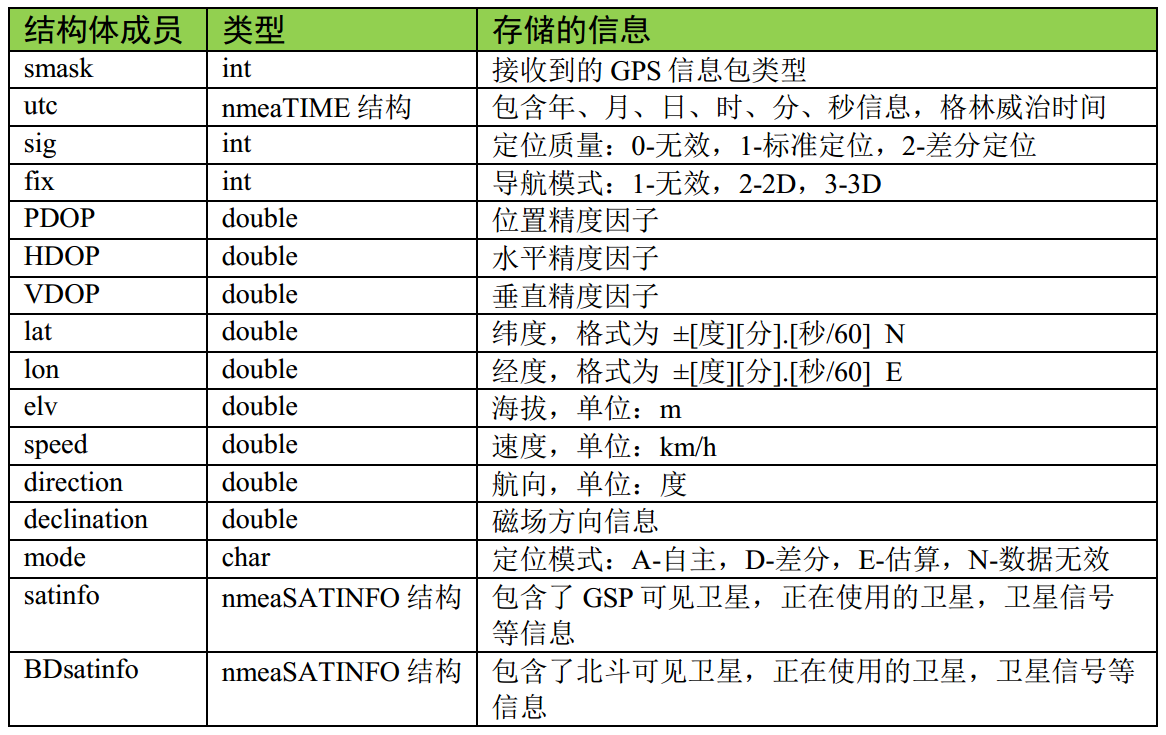
提示
NMEA 解码库良好的封装特性使我们无需关注更深入的内部实现,只需要再了解一下nmeaINFO 数据结构即可,所有 GPS 解码得到的结果都存储在这个结构中,在调用了 nmea_parse() 函数解析完成之后,直接查询 nmeaINFO 结构的数据即可得到解码的结果。
29.6. 常见问题¶
29.6.1. make编译时报错¶
错误
undefined reference to `ceil’
具体报错如下:
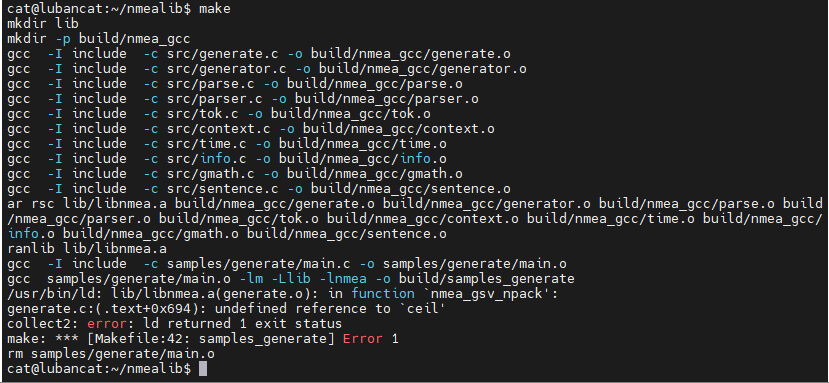
提示
在gcc新的版本中GCC把C99中的标准库分成了libc和libm两个部分,libm中包括一些数学库<math.h>等(这里使用了ceil()这个函数),所以如果要使用libm时则必须加上编译选项-lm(即link libm),不然会报错。
具体解决办法:
编辑Makefile文件
# 需要进到nmealib目录下
vim Makefile
找到下图框选内容
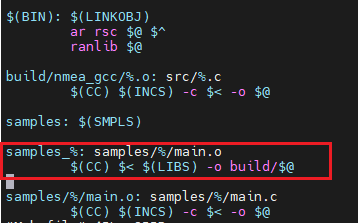
在合适位置添加两个“-lm”,修改完如下图,然后保存退出

重新编译
# 删除前一次编译生成的文件夹
rm -rf build/ lib/
# 重新编译
make