
1. ROS安装¶
注意
目前LubanCat-A1适配的Ubuntu镜像为Ubuntu22.04起步,因此只能安装ROS2。
ROS官网:https://docs.ros.org/
ROS 2 Humble Hawksbill官方文档:https://docs.ros.org/en/humble/
ROS2中文文档:http://dev.ros2.fishros.com/doc/
1.1. ROS2一键安装脚本¶
这里推荐 小鱼(鱼香ROS)的一键安装脚本。
wget http://fishros.com/install -O fishros && . fishros
小技巧
安装过程会有中文提示,根据自身需求选择就行。LubanCat-A1推荐安装的ROS2版本为Humble。
安装完成后,会自动在家目录(/home/cat)下的.bashrc文件末尾添加ROS环境变量
1.2. ROS2测试¶
注意
安装完成后请在桌面终端进行测试,串口终端和VSCode终端是无法运行的。
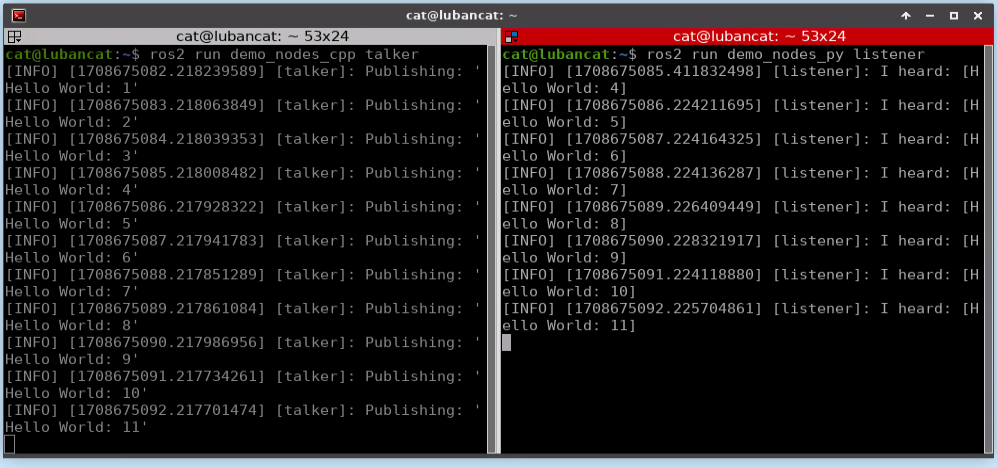
在桌面打开两个桌面,分别运行测试命令。
#一个终端运行C++的 talker
ros2 run demo_nodes_cpp talker
#另一个终端运行Python的 listener
ros2 run demo_nodes_py listener
1.3. ROS2卸载¶
#删除ROS2软件包和相关依赖
sudo apt-get purge ros-*
sudo apt-get autoremove
#删除所有配置文件
sudo rm -rf /etc/ros /opt/ros
#编辑.bashrc文件,删除与ROS2相关环境变量
sudo vim ~/.bashrc