
串口¶
野火K210 AI视觉相机 可以使用28pin IO接口配置两个串口设备,串口的波特率可达5Mbps

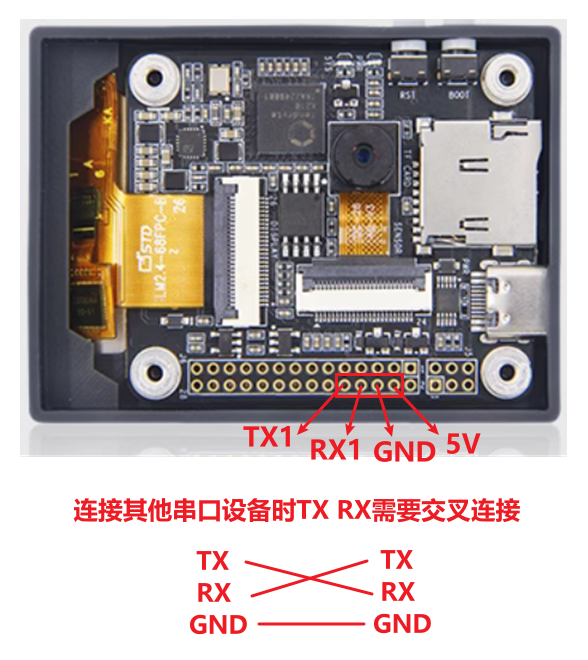
如上图IO引脚图,可以随意使用任意IO作为uart_tx 和 uart_rx 串口的电平是3.3V的,如果接5V的引脚需要调整电路再连接。
下面使用 IO_1 和 IO_0 这两个引脚分别复用成 UART1_TX 和 UART1_RX 。
其他引脚也可以复用成 UART1_TX 和 UART1_RX ,需要自行修改配置。
UART2的配置方法也和UART1类似,修改相应名字即可。
例程讲解¶
该例程在 例程的 02-Hardware\uart.py ,可以在 CanMV IDE 中打开
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | from board import board_info
from fpioa_manager import fm
from maix import GPIO
import time
from machine import UART
import _thread
fm.register(1, fm.fpioa.UART1_TX)
fm.register(0, fm.fpioa.UART1_RX)
# 构造UART对象
uart1 = UART(UART.UART1, 115200)
def uart_rev_func(name):
while 1:
if uart1.any() != 0:
rev = uart1.read()
print("UART get rev:", rev.decode())
_thread.start_new_thread(uart_rev_func,("uart_rev",))
while True:
uart1.write("Send from UART!")
time.sleep(1)
|
实验准备¶
将
野火K210 AI视觉相机连接到CanMV IDE将28pin引脚中的
IO_1连接到串口模块的RX将28pin引脚中的
IO_0连接到串口模块的TX将28pin引脚中的
GND连接到串口模块的GND将串口模块的波特率设置为
115200执行程序
程序分析¶
1 2 3 4 5 6 | from board import board_info
from fpioa_manager import fm
from maix import GPIO
import time
from machine import UART
import _thread
|
导入模块
boardfpioa_managermaixtimemachine_thread
1 2 3 4 5 | fm.register(1, fm.fpioa.UART1_TX)
fm.register(0, fm.fpioa.UART1_RX)
# 构造UART对象
uart1 = UART(UART.UART1, 115200)
|
配置
IO_1引脚为UART1_TX配置
IO_0引脚为UART1_RX创建一个UART对象uart1,配置为使用UART1接口,波特率为115200
1 2 3 4 5 6 7 | def uart_rev_func(name):
while 1:
if uart1.any() != 0:
rev = uart1.read()
print("UART get rev:", rev.decode())
_thread.start_new_thread(uart_rev_func,("uart_rev",))
|
uart_rev_func(name):这是一个线程函数,用于接收UART数据。if uart1.any() != 0::如果UART有数据可读。data = uart1.read():读取数据。print("UART1 get data:", data.decode()):将接收到的数据解码并打印。
1 2 3 | while True:
uart1.write("Send from UART!")
time.sleep(1)
|
uart1.write("From UART1!"):向UART发送字符串“From UART1!”