例程与IDE使用指南¶
例程导入流程¶
1.将 野火K210 AI视觉相机 的 例程 复制到 文档下的CanMV文件夹 ,
野火的 例程 在 百度云盘资料\野火K210 AI视觉相机\1-教程文档_例程源码 里
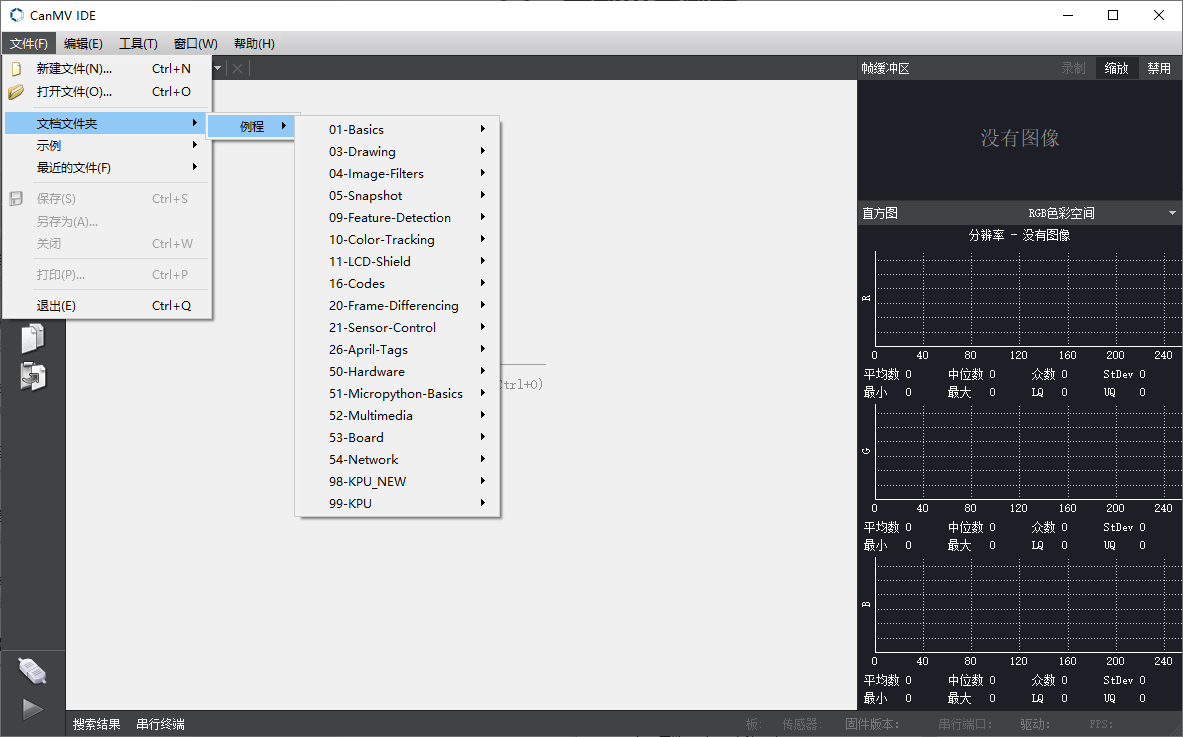
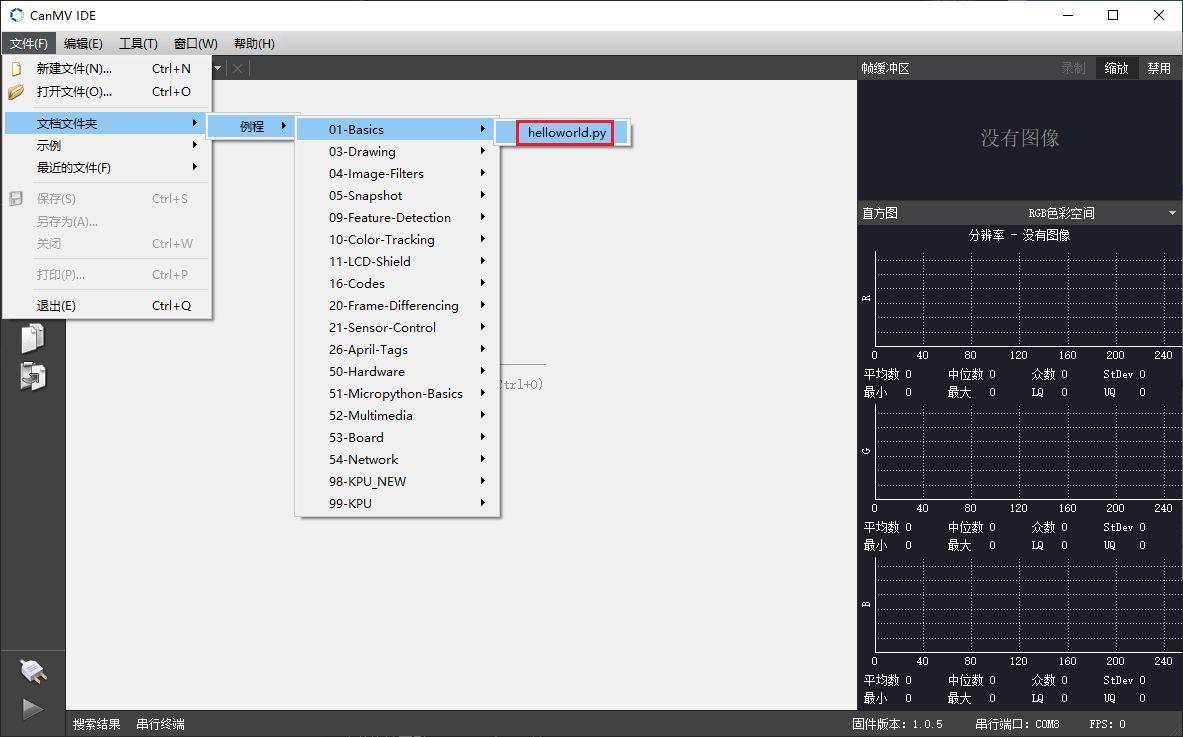
2.打开CanMV IDE,点击文件->文档文件夹就可以看到相关例程了。
例程说明¶
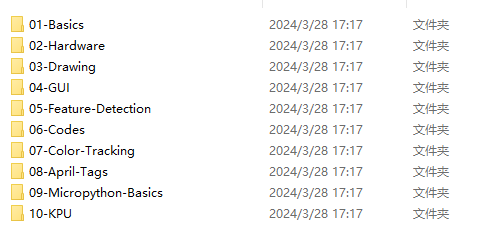
01-Basics: 基础代码,放置Hello_Word例程02-Hardware: 硬件外设相关的例程03-Drawing: 图像叠加字符,字体,矩形,圆等例程04-GUI: 与图像GUI相关的例程05-Feature-Detection: 特征检测,识别图像,识别关键点等06-Codes: 二维识别,条码识别等例程07-Color-Tracking: 颜色跟踪代码08-April-Tags: AprilTag 标记追踪09-Micropython-Basics: Micropython 基础学习代码10-KPU: 调用ai的相关例程
CanMV IDE使用指南¶
在进行本章内容时 时需要提前完成 CH340驱动的安装
连接设备¶
1.使用 type-c线 连接windows电脑和 野火K210 AI视觉相机
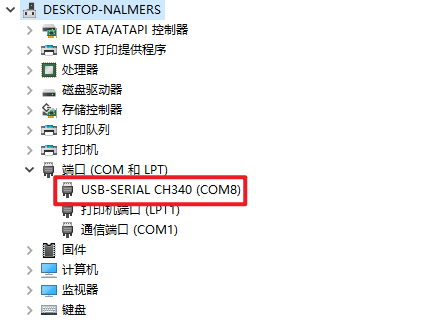
2.打开 设备管理器 查看串口端口,可以看到端口号为 COM8
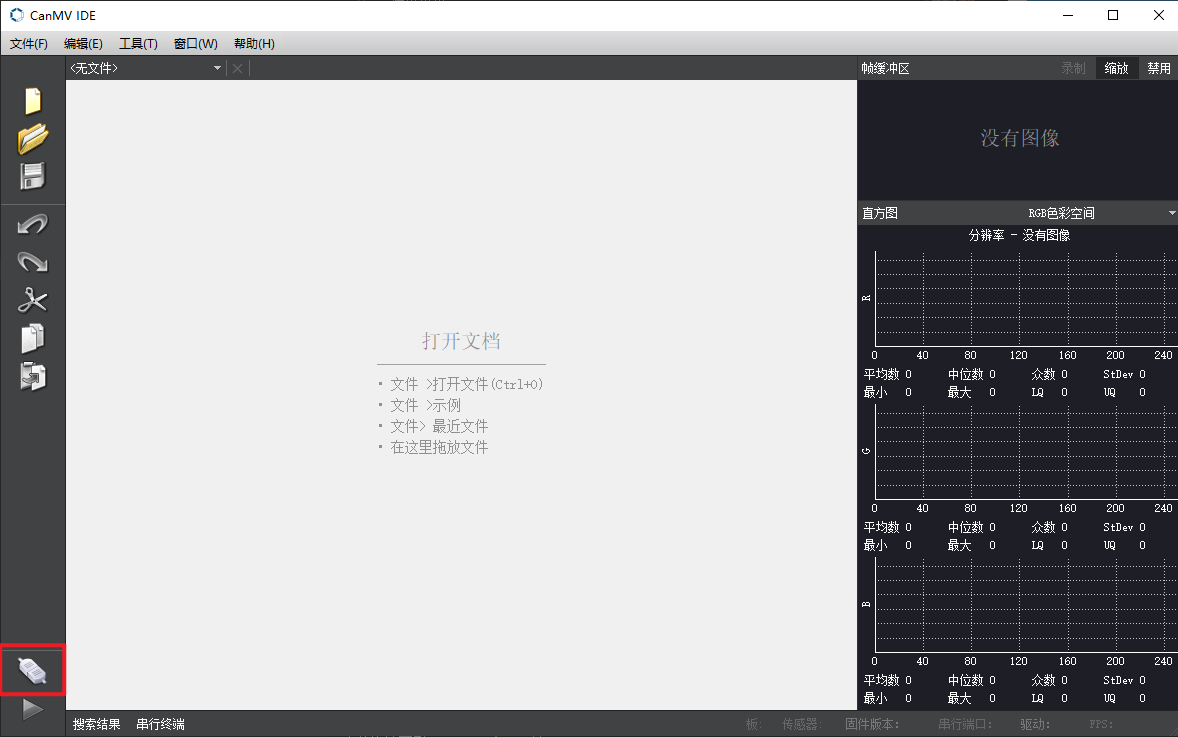
3.点击左下角的连接按钮
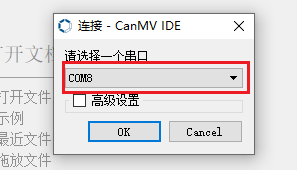
4.选择对应的COM端
5.点击 高级设置 ,选择 mode-3
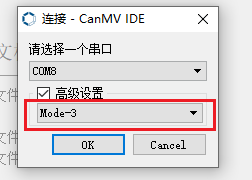
6.点击 ok 连接设备,连接成功会显示下面的图标
例程运行使用¶
在进行本小节内容时,需要提前完成 例程的导入
1.先连接设备,如果使用的是出厂固件的话, 野火K210 AI视觉相机 的屏幕会显示下图的内容

2.打开 CanMV IDE 并连接到 野火K210 AI视觉相机
3.点击 文档文件夹 -> 例程 -> 01-Basic -> helloworld.py
4.点击 CanMV IDE 左下角的绿色的符号,如图下所示

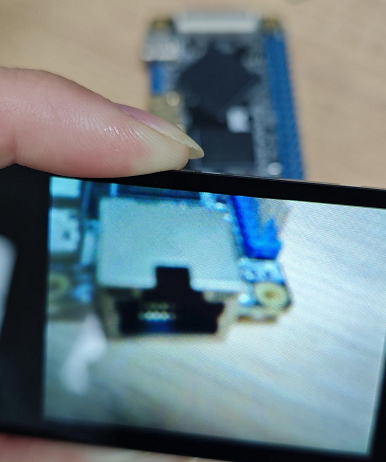
5.就可以看到 野火K210 AI视觉相机 先显示红色的画面,然后屏幕会显示相机捕捉到的内容,如下图所示
6.点击左下角的串行终端,还可以看到 野火K210 AI视觉相机 传回来的信息,可以看到下图显示22.xxx,
表示现在捕捉回来的画面的帧率是22.xxx,左下角还有个红色的 X 这个是取消运行程序,
取消之后 野火K210 AI视觉相机 就会执行默认的开机程序
程序设置开机启动¶
野火K210 AI视觉相机 的默认启动程序是显示软件信息,固件的版本号等,如下图所示
改变开机程序如下,以 例程/01-Basic/helloworld.py 为例
1.使用 type-c线 连接windows电脑和 野火K210 AI视觉相机
2.在 CanMV IDE 上连接设备
3.打开 例程/01-Basic/helloworld.py 例程
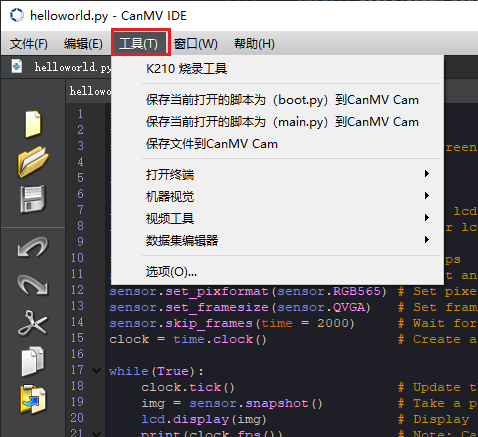
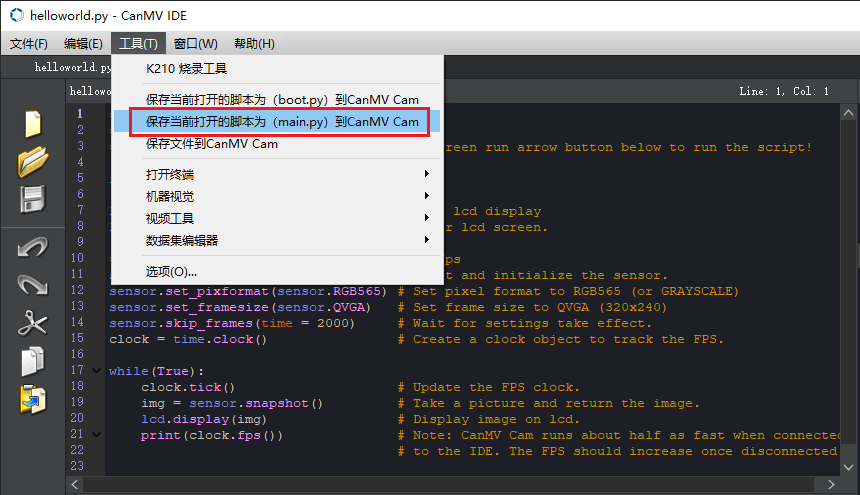
4.点击 工具 -> 点击 保存当前打开的脚本为(main.py) 到CanMV Cam ,如下图所示
5.然后会弹出一个弹窗,点击 Yes
6.等待保存文件,成功后会显示 写入文件成功 ,点击 ok 即可
7.重新拔插电源,就可以看到开机启动程序变为了例程的程序了。
注解
如果是插入SD卡的情况下,会把程序保存到SD卡中
界面介绍¶
CanMV IDE 软件的功能分布如图下所示

主要由9大区域组成
菜单栏: 菜单栏里囊括了
CanMV IDE的所有功能工作栏: 包含了文件操作相关的快捷方式
设备区域: 主要用于连接设备, 设备执行程序
代码区域: 用于编辑代码
串行终端: 用于设备和用户交互
搜索: 搜索相关文字
视频区域: 用于接收相机传回的图像
图像分析: 用于分析传回来的图像
菜单栏里的 工具 还包含其他视觉相关的工具