
4. I2C通讯¶
本章介绍在应用层中使用I2C总线与外部设备的通讯,讲解Linux系 统总线类型设备驱动架构的应用。
4.2. 使能IIC通信接口¶
IIC接口在默认情况是打开状态的,但是不一定有引脚复用,例如i2c3,默认没有引脚占用。
可以通过以下命令查看i2c总线:
1 | ls /dev/i2c-*
|
可以通过可以通过 cvi_pinmux 查看i2c引脚复用情况
1 2 | #列出当前引脚复用
sudo cvi_pinmux -l
|
全部列出查看比较麻烦,可以通过grep进行过滤
1 2 3 4 5 | #使用grep过滤带v的IIC2前后8行信息
sudo cvi_pinmux -l | grep 'v.*IIC2\|IIC2.*v' -A 8 -B 8
#使用grep过滤带v的IIC3前后8行信息
sudo cvi_pinmux -l | grep 'v.*IIC3\|IIC3.*v' -A 8 -B 8
|
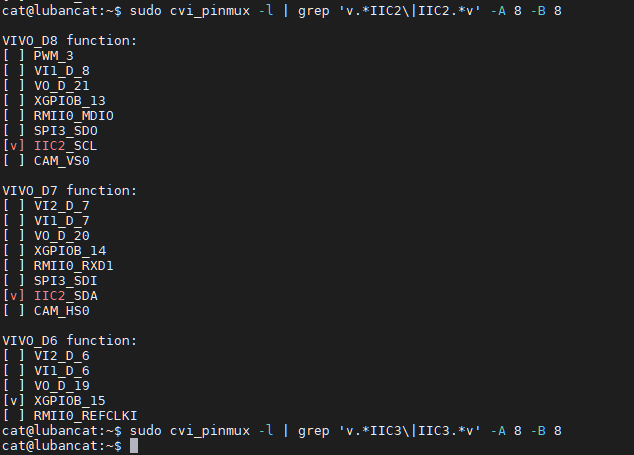
从上图可以才到VIVO_D8、VIVO_D7引脚分别复用为了IIC2_SCL、IIC2_SDA,而IIC3则没有引脚复用。
通过 cvi_pinmux 工具将22pin引脚IIC3_SDA、IIC3_SCL复用为i2c3功能。
1 2 3 4 5 6 7 | #查看当前引脚复用
sudo cvi_pinmux -l | grep -A 5 'IIC3_SDA function'
sudo cvi_pinmux -l | grep -A 5 'IIC3_SCL function'
#修改引脚复用为i2c功能
sudo cvi_pinmux -w IIC3_SDA/IIC3_SDA
sudo cvi_pinmux -w IIC3_SCL/IIC3_SCL
|
4.3. 连接设备¶
注意
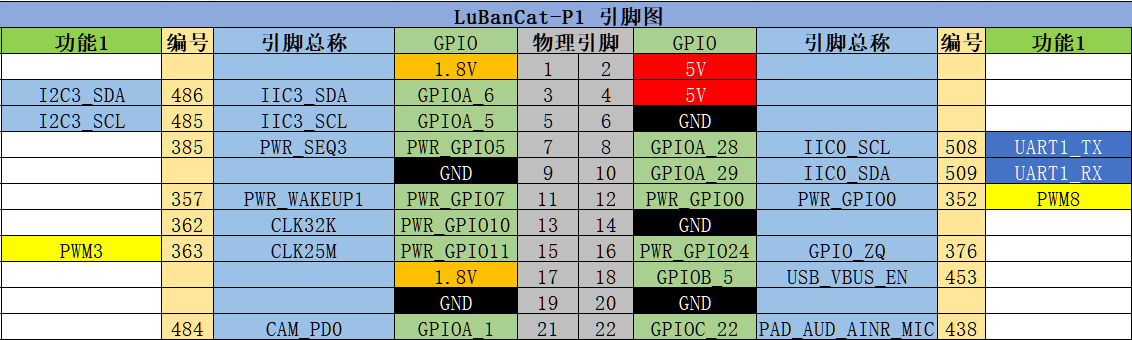
22pin上的IO电平都是1.8v的,耐压也是1.8v,如果外接的设备不兼容1.8v,需要接电平转换模块,将1.8v转成合适的电压再接外设。
MPU6050模块的SDA和SCL需要3.3v电平,所以需要通过电平转换模块将板卡22pin上的i2c-3引脚转换转换成3.3v电平,然后再接入mpu6050模块,如下表所示:
板卡 |
电平转换模块 |
模块 |
|---|---|---|
VCC1.8 |
VCC1.8/VCC3.3 |
VCC3.3 |
SCL |
SCL |
SCL |
SDA |
SDA |
SDA |
GND |
GND |
GND |
4.4. IIC 第三方工具-i2c-tools¶
使用i2c-tools工具包提供了一些非常方便的工具来对系统的I2C总线进行调试, 在板卡的终端中可直接执行以下命令进行安装:
1 | sudo apt install i2c-tools
|
安装后可使用的命令有i2cdetect、i2cdump、i2cset以及i2cget,用于扫描I2C总线上的设备、读写指定设备的寄存器等。
然后查看挂载在i2c-3上的器件情况,输出内容如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | root@lubancat:~# i2cdetect -r 3
WARNING! This program can confuse your I2C bus, cause data loss and worse!
I will probe file /dev/i2c-3.
I will probe address range 0x00-0x7f.
Continue? [Y/n] y
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- 68 -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
root@lubancat:~#
|
其中 “68” 是为MPU6050的设备地址,常用的命令还有以下几个。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | #检测当前系统有几组i2c总线
i2cdetect -l
#查看i2c-3接口上的设备
i2cdetect -r 3
#读取指定设备的全部寄存器的值。
i2cdump -f -y 3 0x68
#读取指定IIC设备的某个寄存器的值,如下读取地址为0x68器件中的0x01寄存器值。
i2cget -f -y 3 0x68 0x01
#写入指定IIC设备的某个寄存器的值,如下设置地址为0x68器件中的0x01寄存器值为0x6f;
i2cset -f -y 3 0x68 0x01 0x6f
|
4.5. 读取陀螺仪传感器数据实验¶
4.5.1. 实验说明¶
本教程将通过IIC接口读取陀螺仪(MPU6050)的原始数据。 本次实验以i2c-3做为示例, 当然,如果没有mpu6050模块,可以通过学习操作mpu6050的方式操作您想要操作的i2c设备 在测试程序中大约每一秒读取并显示一次MPU6050的原始数据。
4.5.2. ioctl函数¶
在编写应用程序时需要使用ioctl函数设置i2c相关配置,其函数原型如下
1 2 3 | #include <sys/ioctl.h>
int ioctl(int fd, unsigned long request, ...);
|
其中对于终端request的值常用的有以下几种
I2C_RETRIES |
设置收不到ACK时的重试次数,默认为1 |
I2C_TIMEOUT |
设置超时时限的jiffies |
I2C_SLAVE |
设置从机地址 |
I2C_SLAVE_FORCE |
强制设置从机地址 |
I2C_TENBIT |
选择地址长度0为7位地址,非0为10位 |
4.5.3. 编写应用程序¶
根据ioctl相关参数即可编写与i2c相关的接口函数,读取mpu6050原始数据程序如下
1 | quick_start/i2c/i2c_mpu6050.c
|
代码较长复制粘贴容易乱序,可以下载我们提供的源码 i2c_mpu6050.c
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 | #include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <linux/i2c.h>
#include <linux/i2c-dev.h>
#include <sys/ioctl.h>
/*寄存器地址*/
#define SMPLRT_DIV 0x19
#define PWR_MGMT_1 0x6B
#define CONFIG 0x1A
#define ACCEL_CONFIG 0x1C
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
//从机地址 MPU6050地址
#define Address 0x68
//MPU6050操作相关函数
static int mpu6050_init(int fd,uint8_t addr);
static int i2c_write(int fd, uint8_t addr,uint8_t reg,uint8_t val);
static int i2c_read(int fd, uint8_t addr,uint8_t reg,uint8_t * val);
static short GetData(int fd,uint8_t addr,unsigned char REG_Address);
int main(int argc,char *argv[] )
{
int fd;
fd = I2C_SLAVE;
if(argc < 2){
printf("Wrong use !!!!\n");
printf("Usage: %s [dev]\n",argv[0]);
return -1;
}
fd = open(argv[1], O_RDWR); // open file and enable read and write
if (fd < 0){
printf("Can't open %s \n",argv[1]); // open i2c dev file fail
exit(1);
}
//初始化MPU6050
mpu6050_init(fd,Address);
while(1){
usleep(1000 * 10);
printf("ACCE_X:%6d\n ", GetData(fd,Address,ACCEL_XOUT_H));
usleep(1000 * 10);
printf("ACCE_Y:%6d\n ", GetData(fd,Address,ACCEL_YOUT_H));
usleep(1000 * 10);
printf("ACCE_Z:%6d\n ", GetData(fd,Address,ACCEL_ZOUT_H));
usleep(1000 * 10);
printf("GYRO_X:%6d\n ", GetData(fd,Address,GYRO_XOUT_H));
usleep(1000 * 10);
printf("GYRO_Y:%6d\n ", GetData(fd,Address,GYRO_YOUT_H));
usleep(1000 * 10);
printf("GYRO_Z:%6d\n\n ", GetData(fd,Address,GYRO_ZOUT_H));
sleep(1);
}
close(fd);
return 0;
}
static int mpu6050_init(int fd,uint8_t addr)
{
i2c_write(fd, addr,PWR_MGMT_1,0x00); //配置电源管理,0x00,正常启动
i2c_write(fd, addr,SMPLRT_DIV,0x07); //设置MPU6050的输出分频既设置采样
i2c_write(fd, addr,CONFIG,0x06); //配置数字低通滤波器和帧同步引脚
i2c_write(fd, addr,ACCEL_CONFIG,0x01); //设置量程和 X、Y、Z 轴加速度自检
return 0;
}
static int i2c_write(int fd, uint8_t addr,uint8_t reg,uint8_t val)
{
int retries;
uint8_t data[2];
data[0] = reg;
data[1] = val;
//设置地址长度:0为7位地址
ioctl(fd,I2C_TENBIT,0);
//设置从机地址
if (ioctl(fd,I2C_SLAVE,addr) < 0){
printf("fail to set i2c device slave address!\n");
close(fd);
return -1;
}
//设置收不到ACK时的重试次数
ioctl(fd,I2C_RETRIES,5);
if (write(fd, data, 2) == 2){
return 0;
}
else{
return -1;
}
}
static int i2c_read(int fd, uint8_t addr,uint8_t reg,uint8_t * val)
{
int retries;
//设置地址长度:0为7位地址
ioctl(fd,I2C_TENBIT,0);
//设置从机地址
if (ioctl(fd,I2C_SLAVE,addr) < 0){
printf("fail to set i2c device slave address!\n");
close(fd);
return -1;
}
//设置收不到ACK时的重试次数
ioctl(fd,I2C_RETRIES,5);
if (write(fd, ®, 1) == 1){
if (read(fd, val, 1) == 1){
return 0;
}
}
else{
return -1;
}
}
static short GetData(int fd,uint8_t addr,unsigned char REG_Address)
{
char H, L;
i2c_read(fd, addr,REG_Address, &H);
usleep(1000);
i2c_read(fd, addr,REG_Address + 1, &L);
return (H << 8) +L;
}
|
保存退出,接下来再进行编译运行
1 2 3 4 5 6 7 | #板卡本地编译
gcc i2c_mpu6050.c -o mpu6050
#交叉编译
riscv64-unknown-linux-musl-gcc i2c_mpu6050.c -o mpu6050 -march=rv64imafdcvxthead -mcmodel=medany -mabi=lp64d
sudo ./mpu6050 /dev/i2c-3
|
效果如下图所示
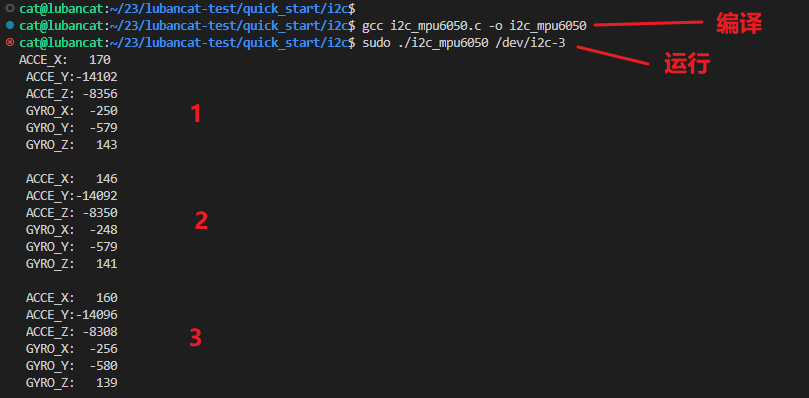
三次数据的采集
提示
如果需要自启动配置和使能i2c,可将相关命令写入/etc/init.d/sophgo.sh系统初始化脚本末尾。