2. Uboot启动流程分析——下¶
2.1. u-boot启动第一阶段源代码分析¶
u-boot加载启动内核过程可以大致分为两个阶段上,接下来我们将详细分析u-boot源代码(版本号为2019.04)。
对于imx6ull而言,其第一阶段对应的文件时arch/arm/cpu/armv7/start.S和arch/arm/cpu/armv7/lowlevel_init.S
u-boot启动第一阶段流程图如下所示:

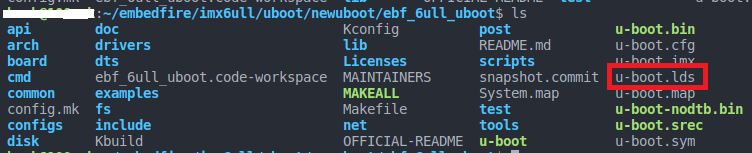
为了方便分析u-boot的启动流程,需要下载好u-boot源码并将其编译一遍,编译通过后我们可以看到源码根目录下 会出现一个u-boot.lds文件,如下图所示:
注意
必须要将u-boot编译一遍,且译成功后才会出现完整的.lds文件.
链接脚本有什么用?它描述了输出文件的内存布局,如何分析u-boot.lds链接脚本?每一个链接过程都会由连接脚本(一般以lds作为文件的后缀名)控制,经过编译后的u-boot源码 会输出各个层次的链接脚本,其中总的链接脚本在u-boot源码根目录下,通过分析总的链接脚本我们可以把握u-boot的来龙去脉, 带“@”后面为注释,总的链接脚本如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 | OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm") @指定输出可执行文件是elf格式,32位ARM指令,小端
OUTPUT_ARCH(arm) @设置输出可执行文件的体系架构为arm
ENTRY(_start) @将_start设为入口地址
SECTIONS
{
. = 0x00000000; @指定可执行文件的全局入口点,通常这个地址都放在ROM(flash)0x0位置。必须使编译器知道这个地址,通常都是修改此处来完成
. = ALIGN(4); @代码以4字节对齐
.text : @指定代码段
{
*(.__image_copy_start) @u-boot把自己拷贝到RAM中,这里指定拷贝的起始处
*(.vectors) @arch/arm/lib/vectors.S,存放异常向量表
arch/arm/cpu/armv7/start.o (.text*) @代码的第一个部分,arch/arm/cpu/armv7/start.S
*(.text*) @其它代码段存放于此处
}
. = ALIGN(4); @上面的代码结束后,可能会导致没有4字节对齐,这里再一次做好4字节对齐,方便后面的只读数据段
.rodata : { *(SORT_BY_ALIGNMENT(SORT_BY_NAME(.rodata*))) } @指定存放只读数据段
. = ALIGN(4); @和上面一样,需要4字节对齐,方便后面的数据段
.data : { @指定读/写数据段
*(.data*)
}
. = ALIGN(4); @都一样,以后就不再赘述了
. = .;
. = ALIGN(4);
.u_boot_list : {
KEEP(*(SORT(.u_boot_list*))); @在读/写数据段后,存放一些u-boot自有的函数,如u-boot command等
}
. = ALIGN(4);
.image_copy_end :
{
*(.__image_copy_end) @这里指定拷贝的末尾处,拷贝的包括代码段、只读数据、读写数据段和u_boot_list等
}
.rel_dyn_start :
{
*(.__rel_dyn_start) @动态链接符段开始处
}
.rel.dyn : {
*(.rel*) @存放动态链接符的地方
}
.rel_dyn_end :
{
*(.__rel_dyn_end) @动态链接符段末尾处
}
.end :
{
*(.__end)
}
_image_binary_end = .; @二进制文件结束
. = ALIGN(4096);
.mmutable : {
*(.mmutable) @内存管理单元表
}
.bss_start __rel_dyn_start (OVERLAY) : {@BSS段起始
KEEP(*(.__bss_start));
__bss_base = .;
}
.bss __bss_base (OVERLAY) : {
*(.bss*)
. = ALIGN(4);
__bss_limit = .; @把__bss_limit赋值为当前位置
}
.bss_end __bss_limit (OVERLAY) : {
KEEP(*(.__bss_end));
} @BSS段末尾
.dynsym _image_binary_end : { *(.dynsym) }
.dynbss : { *(.dynbss) }
.dynstr : { *(.dynstr*) }
.dynamic : { *(.dynamic*) }
.plt : { *(.plt*) }
.interp : { *(.interp*) }
.gnu.hash : { *(.gnu.hash) }
.gnu : { *(.gnu*) }
.ARM.exidx : { *(.ARM.exidx*) }
.gnu.linkonce.armexidx : { *(.gnu.linkonce.armexidx.*) }
}
|
到这里,我们已经带领大家详细分析了总的链接脚本u-boot.lds,大家注意.S文件中的:ENTRY(_start), 全局搜索_start即可找到它定义在arch/arm/lib/vectors.S文件中,这里便是代码入口处,见名知意,这里便指明了异常向量, 接下来我们顺藤摸瓜来分析一下arch/arm/lib/vectors.S的执行过程。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 | *************************************************************************
*
* Exception vectors as described in ARM reference manuals
*
* Uses indirect branch to allow reaching handlers anywhere in memory.
*
*************************************************************************
*/
_start:
#ifdef CONFIG_SYS_DV_NOR_BOOT_CFG
.word CONFIG_SYS_DV_NOR_BOOT_CFG
#endif
b resets /* 跳转到resets处,b为的无条件跳转,bl还把PC(r15)赋值给链接寄存器(r14) */
ldr pc, _undefined_instruction /* 未定义指令异常向量 */
ldr pc, _software_interrupt /* 预取指令异常向量 */
ldr pc, _prefetch_abort /* 数据操作异常向量 */
ldr pc, _data_abort /* 预取指令异常向量 */
ldr pc, _not_used /* 没有使用 */
ldr pc, _irq /* irq中断向量 */
ldr pc, _fiq /* fiq中断向量 */
...... /* 省略部分代码 */
/* 中断向量表入口地址 */
_undefined_instruction: .word undefined_instruction /* 当前地址(_undefined_instruction)存放undefined_instruction
_software_interrupt: .word software_interrupt
_prefetch_abort: .word prefetch_abort
_data_abort: .word data_abort
_not_used: .word not_used
_irq: .word irq
_fiq: .word fiq
.balignl 16,0xdeadbeef
|
代码中断都定义了各种异常向量,它和8051单片机中的中断向量很类似,没有什么神秘的,.word表示四字节对齐,也就是说他们的指令都是固定的。当cpu产生异常时,便会将对应的异常入口地址加载到pc中,进而处理相应的异常处理程序。 各个异常向量具体描述如下表格所示:
地址 |
异常 |
进入模式 |
描述 |
|---|---|---|---|
0x00000000 |
复位 |
管理模式 |
位电平有效时,产生复位异常,程序跳转到复位处理程序处执行 |
0x00000004 |
未定义指令 |
未定义模式 |
遇到不能处理的指令时,产生未定义指令异 |
0x00000008 |
软件中断 |
管理模式 |
执行SWI指令产生,用于用户模式下的程序调用特权操作指令 |
0x0000000c |
预存指令 |
中止模式 |
处理器预取指令的地址不存在,或该地址不允许当前指令访问,产生指令预取中止异常 |
0x00000010 |
数据操作 |
中止义模式 |
处理器数据访问指令的地址不存在,或该地址不允许当前指令访问时,产生数据中止异常 |
0x00000014 |
未使用 |
未使用 |
未使用 |
0x00000018 |
IRQ |
IRQ |
外部中断请求有效,且CPSR中的I位为0时,产生IRQ异常 |
0x0000001c |
FIQ |
FIQ |
快速中断请求引脚有效,且CPSR中的F位为0时,产生FIQ异常 |
其中复位异常向量指令“b resets”决定了u-boot启动或者复位后将自动跳转到resets标志处执行,下面我们接着分析一下resets到底 做了哪些工作,全局搜索我们发现resets其实就定义在arch/arm/cpu/armv7/start.S文件中,如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 | /*************************************************************************
*
* Startup Code (reset vector)
*
* Do important init only if we don't start from memory!
* Setup memory and board specific bits prior to relocation.
* Relocate armboot to ram. Setup stack.
*
*************************************************************************/
.globl reset
.globl save_boot_params_ret
reset:
/* Allow the board to save important registers */
b save_boot_params
save_boot_params_ret:
|
阅读上面代码,.globl意思很简单,相当于c语言当中的extern,声明reset,且告诉连接器reset为全局标量, 外部是可以访问的(在arch/arm/lib/vectors.S代码中“b reset”有用到此变量)。分析上面代码可知, reset中只有一条跳转指令“b save_boot_params”,搜索标号“save_boot_params”发现,它也只有一个跳转指令如下:
1 2 3 4 5 6 7 8 9 10 11 12 | /*************************************************************************
*
* void save_boot_params(u32 r0, u32 r1, u32 r2, u32 r3)
* __attribute__((weak));
*
* Stack pointer is not yet initialized at this moment
* Don't save anything to stack even if compiled with -O0
*
*************************************************************************/
ENTRY(save_boot_params)
b save_boot_params_ret @ 跳转到save_boot_params_ret标号处
ENDPROC(save_boot_params)
|
save_boot_params_ret标号代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 | save_boot_params_ret:
/*
* disable interrupts (FIQ and IRQ), also set the cpu to SVC32 mode,
* except if in HYP mode already
*/
mrs r0, cpsr
and r1, r0, #0x1f @ mask mode bits
teq r1, #0x1a @ test for HYP mode
bicne r0, r0, #0x1f @ clear all mode bits
orrne r0, r0, #0x13 @ set SVC mode
orr r0, r0, #0xc0 @ disable FIQ and IRQ
msr cpsr,r0
|
以上代码主要工作是将cpu的工作模式设置为SVC32模式(即管理模式),同时将中断禁止位与快速中断禁止位都设置为1, 以此屏蔽IRQ和FIQ的中断,说白了就是设置cpsr(Current Program Status Register),cpsr(Saved Program Status Register)是当前程序状态寄存器,spsr是保存的程序状态寄存器。 打开《arm_architecture_reference_manual ARMv7-A and ARMv7-R edition》ARMv7架构参考手册,具体看下cpsr的位域结构,如下图所示:
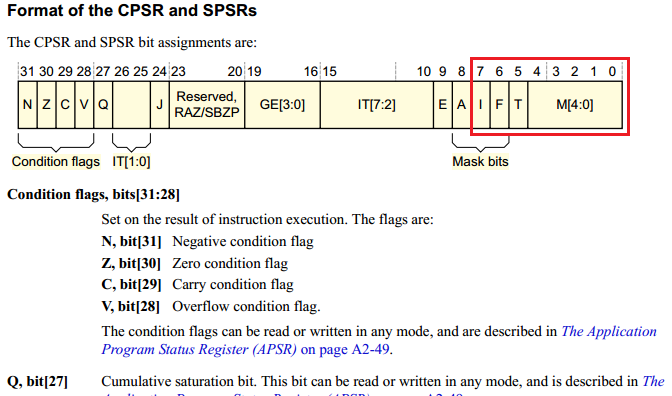
上图中红色方框标注的是“save_boot_params_ret”函数要设置的位域,其中模式位域M[4:0]决定了当前cpu的工作模式, 而位域F[6]为FIQ中断屏蔽位,位域I[7]为IRQ中断屏蔽位,位域T[5]为Thumb执行状态位(此位没有设置,可忽略), 模式位域M[4:0]详情如下表格所示:
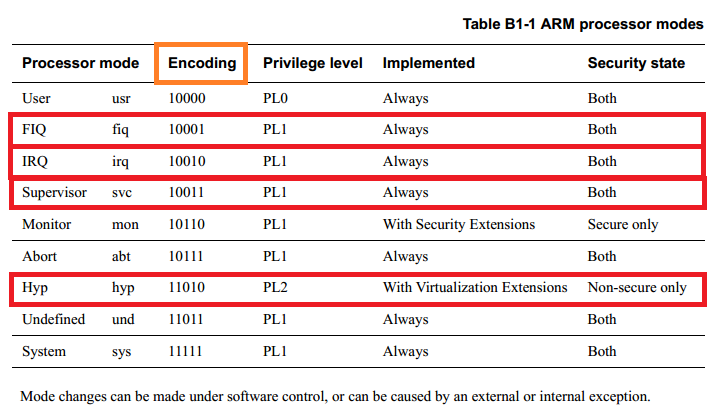
图中红色方框为“save_boot_params_ret”函数做过手脚的地方,我们根据Encoding来设置模式位域M[4:0]就可以设置 cpu的工作模式。 详细了解了这段位域的意思后,我们再一行一行详细的分析“save_boot_params_ret”函数,看看它到底做了什么。
mrs r0, cpsr:加载cpsr寄存器的值到r0寄存器中;
and r1, r0, #0x1f:屏蔽寄存器的非模式位域,留下模式位域的值;
teq r1, #0x1a:测试看看当前cpu是否处于hyp模式,对照上面表格Hyp的Encoding值为11010,转成十六进制正好是0x1a;
bicne r0, r0, #0x1f:清除所有的模式位M[4:0];
orrne r0, r0, #0x13:设置为Supervisor(SVC)模式,对照上面表格Supervisor的Encoding值为10011,转成十六进制正好是0x13;
orr r0, r0, #0xc0: 屏蔽FIQ和IRQ中断;
msr cpsr,r0: 将修改后r0寄存器的值重新装载到cpsr中。
接着继续分析后面的代码,从此我们为了方便分析源码,将源码的注释写到对应的指令行中。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | /*
* Setup vector:
* (OMAP4 spl TEXT_BASE is not 32 byte aligned.
* Continue to use ROM code vector only in OMAP4 spl)
*/
#if !(defined(CONFIG_OMAP44XX) && defined(CONFIG_SPL_BUILD)) @条件编译,如果没有定义CONFIG_OMAP44XX和CONFIG_SPL_BUILD则编译下面的代码段
/* Set V=0 in CP15 SCTLR register - for VBAR to point to vector */
mrc p15, 0, r0, c1, c0, 0 @ Read CP15 SCTLR Register
bic r0, #CR_V @ V = 0
mcr p15, 0, r0, c1, c0, 0 @ Write CP15 SCTLR Register
/* Set vector address in CP15 VBAR register */
ldr r0, =_start
mcr p15, 0, r0, c12, c0, 0 @Set VBAR
#endif
|
根据源码英文注释,我们大概知道这段代码是要设置SCTLR(系统控制寄存器),参考ARMv7架构参考手册,找到SCTLR寄存器, 具体内容如下图所示:
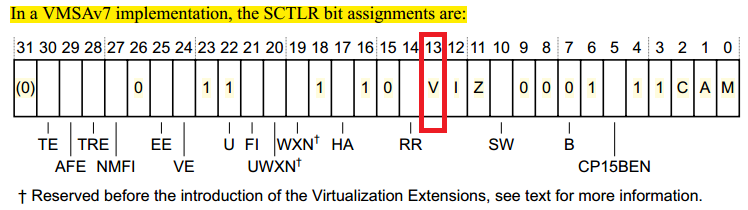
SCTLR寄存器用于控制标准内存和系统设备,并且为在硬件内核中实现的功能提供状态信息,其中位域V[13]的作用是选择 异常向量表的基地址,根据ARMv7架构参考手册描述可知,当往V[13]填如0时,异常向量表的基地址=0x00000000,并且 该地址可以被re-mapped(重映射);当往V[13]填如1时,异常向量表的基地址=0xffff0000,此时该地址不能被重映射。 源码中大量用到了mrc和mcr指令,mrc为 协处理器寄存器到ARM 处理器寄存器的数据传送指令,mcr为ARM 处理器寄存器到协处理器寄存器的数据传送指令。
第8行,读取SCTLR寄存器中的值到r0中。
第9行,清除SCTLR寄存器中的第CR_V位(CR_V在arch/arm/include/asm/system.h中定义为(1 << 13)),即设置异常向量表的及地址为0x00000000,且支持重映射。
第10行,将修改后的r0值再写到SCTLR寄存器中。
第13行,将_start的值加载到r0寄存器当中。
在u-boot源码目录下全局搜索_start(注意:要编译u-boot),在System.map文件中,可以看到_start的值为0x87800000,该地址为我们前面分析u-boot.lds中向量表vectors的起始地址, 如下图所示:
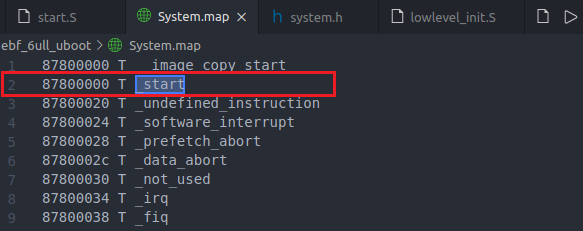
与此同时我们还可以看到其他异常向量的链接地址,如未定义指令异常向量被链接在0x87800020中,System.map用于存放内核符号表信息。 符号表是所有符号和其对应地址的一个列表,随着每次内核的编译,就会产生一个新的对应的System.map文件,当内核运行出错时, 通过System.map中的符号表解析,就可以查到一个地址值对应的变量名。
第14行,设置c12的值为0x87800000(_start),即设置非安全模式异常基址寄存器为0x87800000,结合前面清除SCTLR中的V[13],即实现的向量表的重定位。ARM默认的异常向量表入口在0x0地址,uboot的运行介质(norflash nandflash sram等)映射地址可能不在0x0起始的地址,所以需要修改异常向量表入口。
总结:清除SCTLR中位域V[13],然后设置VBAR指向向量表以实现向量表定位到0x87800000地址处。在分析后面代码之前, 我们先总结一下这段_start中汇编做的工作:关闭中断、初始化异常向量表、设置SVC32模式、配置cp15.
接着分析源码,如下所示:
1 2 3 4 5 6 7 8 9 | /* the mask ROM code should have PLL and others stable */
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
#ifdef CONFIG_CPU_V7A
bl cpu_init_cp15
#endif
#ifndef CONFIG_SKIP_LOWLEVEL_INIT_ONLY
bl cpu_init_crit
#endif
#endif
|
第2行,如果未定义CONFIG_SKIP_LOWLEVEL_INIT则编译后面的代码块,经查找CONFIG_SKIP_LOWLEVEL_INIT未被定义,后面的代码块有效。
第3行,CONFIG_CPU_V7A已被定义。
第4行,跳转至cpu_init_cp15标号处,执行完cpu_init_cp15函数后返回。
第6行,CONFIG_SKIP_LOWLEVEL_INIT_ONLY未被定义。
第7行,跳转至cpu_init_crit标号处,执行完cpu_init_crit函数后返回。
搜索cpu_init_cp15,其函数实现如下所示:
1 2 3 4 5 6 7 8 9 10 | ENTRY(cpu_init_cp15)
/*
* Invalidate L1 I/D
*/
mov r0, #0 @ set up for MCR
mcr p15, 0, r0, c8, c7, 0 @ invalidate TLBs
mcr p15, 0, r0, c7, c5, 0 @ invalidate icache
mcr p15, 0, r0, c7, c5, 6 @ invalidate BP array
mcr p15, 0, r0, c7, c10, 4 @ DSB
mcr p15, 0, r0, c7, c5, 4 @ ISB
|
上面代码看起来有点复杂,但是别灰心,沉着冷静,最好是看完本章然后自己去动闹分析一边, 自然就会对u-boot有更加深入的了解,这些过程对于移植u-boot来说时非常重要的。废话不多说,咱们接着分析 上面的代码片段。
第5行,这行比较简单,就是将r0寄存器的内容清零。
第6行,首先,mcr做的事情其实很简单,就是“ARM处理器的寄存器中的数据传送到协处理器寄存器”,此处是,将将ARM的寄存器r0中的数据,此时r0=0,所以就是把0这个数据,传送到协处理器CP15中。而对应就是写入到C8,即将0写入到寄存器8(Register 8)中去,它是一个只写的寄存器,配合指令“mcr p15, 0, r0, c8, c7, 0”最后两个参数,其作用是使整个数据和指令TLB无效,禁止虚拟地址到物理地址的转换,为何要关闭呢?因为刚开始我们并没有建立页表,且都是直接操作物理寄存器的,所以不能打开,否则会发生意想不到的错误。
第7行,使无效整个指令缓冲。
第8行,清空整个跳转目标缓冲,关闭分支预测功能。
第9行,清空写缓冲区,以便数据同步。
第10行,清空预取缓冲区,以便指令同步,清空流水线中已经取到的指令,进行重新取指令。
代码中基本都是清空各种缓冲,如果使用陈旧条目启用缓存,则代码可能会崩溃,导致系统无法启动。
接着往下看,下面代码都是顺序执行的,所以我们一路分析下去:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | /*
* disable MMU stuff and caches
*/
mrc p15, 0, r0, c1, c0, 0
bic r0, r0, #0x00002000 @ clear bits 13 (--V-)
bic r0, r0, #0x00000007 @ clear bits 2:0 (-CAM)
orr r0, r0, #0x00000002 @ set bit 1 (--A-) Align
orr r0, r0, #0x00000800 @ set bit 11 (Z---) BTB
#ifdef CONFIG_SYS_ICACHE_OFF
bic r0, r0, #0x00001000 @ clear bit 12 (I) I-cache
#else
orr r0, r0, #0x00001000 @ set bit 12 (I) I-cache
#endif
mcr p15, 0, r0, c1, c0, 0
#ifdef CONFIG_ARM_ERRATA_716044
mrc p15, 0, r0, c1, c0, 0 @ read system control register
orr r0, r0, #1 << 11 @ set bit #11
mcr p15, 0, r0, c1, c0, 0 @ write system control register
#endif
|
第4行,将cp15的寄存器c1的值读到r0中,c1是一个控制寄存器,它包括使能或禁止mmu以及与其他存储系统相关的功能,配置存储系统以及ARM处理器中的相关部分的工作。
第5行,清除位域V[13],即选择低端异常中断向量表,向量表基地址为0x00000000,且支持向量表重映射。
第6行,清除位域M[0]、A[1]、C[2],即分别禁止内存管理单元mmu、地址对齐检查、数据缓冲。
第7行,使能地址对齐检查。
第8行,打开ARM系统的跳转预测(分支预测)功能,不打断流水线,提高指令执行效率。
第9~13行,如果定义了CONFIG_SYS_ICACHE_OFF则关闭I-cache,否则打开I-cache,此处没有定义CONFIG_SYS_ICACHE_OFF,故打开I-cache。
第14行,将修改后的r0重新写入SCTLR寄存器中。
第16~20行,由于我们没有定义CONFIG_ARM_ERRATA_716044,故忽略这段代码。
到这里我们再总结一下上面这段代码的功能含义,首先,我们为何要关闭mmu?mmu负责从虚拟地址到物理地址之间的转换,但是我们现在的汇编都是直接操作物理寄存器, 此时如果打开了mmu,而我们并没有有效的TLB,这样cpu可以说是胡乱运行的,所以我们需要关闭mmu,不需要它转换地址,直接操作寄存器方便快捷。 然后,再发出灵魂拷问,为何要关闭cache?因为catch和MMU是通过cp15管理的,刚上电的时候,CPU并不能管理他们。所以上电的时候mmu必须关闭,指令cache可关闭,可不关闭,但数据cache一定要关闭, 否则可能导致刚开始的代码里面,去取数据的时候,从catch里面取,而这时候RAM中数据还没有cache过来,导致数据预取异常。
下面这些代码段大都是和cpu的cp15协处理器相关,并根据条件编译进行相关的设置,我们就不一一分析了,感兴趣的同学可以参考着《ARM ArchitectureReference Manual ARMv7-A and ARMv7-R edition》、《Cortex-A7 Technical ReferenceManua》及 《ARM Generic Interrupt Controller(ARM GIC控制器)V3.0与V4.0》等相关手册进行详细分析,我们主要的是抓住重点分析。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 | #if (defined(CONFIG_ARM_ERRATA_742230) || defined(CONFIG_ARM_ERRATA_794072))
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 4 @ set bit #4
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
#ifdef CONFIG_ARM_ERRATA_743622
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 6 @ set bit #6
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
#ifdef CONFIG_ARM_ERRATA_751472
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 11 @ set bit #11
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
#ifdef CONFIG_ARM_ERRATA_761320
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 21 @ set bit #21
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
#ifdef CONFIG_ARM_ERRATA_845369
mrc p15, 0, r0, c15, c0, 1 @ read diagnostic register
orr r0, r0, #1 << 22 @ set bit #22
mcr p15, 0, r0, c15, c0, 1 @ write diagnostic register
#endif
mov r5, lr @ 用于保存返回地址
mrc p15, 0, r1, c0, c0, 0 @ r1 has Read Main ID Register (MIDR)
mov r3, r1, lsr #20 @ get variant field
and r3, r3, #0xf @ r3 has CPU variant
and r4, r1, #0xf @ r4 has CPU revision
mov r2, r3, lsl #4 @ shift variant field for combined value
orr r2, r4, r2 @ r2 has combined CPU variant + revision
#ifdef CONFIG_ARM_ERRATA_798870 @未定义,忽略此段
cmp r2, #0x30 @ Applies to lower than R3p0
bge skip_errata_798870 @ skip if not affected rev
cmp r2, #0x20 @ Applies to including and above R2p0
blt skip_errata_798870 @ skip if not affected rev
mrc p15, 1, r0, c15, c0, 0 @ read l2 aux ctrl reg
orr r0, r0, #1 << 7 @ Enable hazard-detect timeout
push {r1-r5} @ Save the cpu info registers
bl v7_arch_cp15_set_l2aux_ctrl
isb @ Recommended ISB after l2actlr update
pop {r1-r5} @ Restore the cpu info - fall through
skip_errata_798870:
#endif
#ifdef CONFIG_ARM_ERRATA_801819 @未定义,忽略此段
cmp r2, #0x24 @ Applies to lt including R2p4
bgt skip_errata_801819 @ skip if not affected rev
cmp r2, #0x20 @ Applies to including and above R2p0
blt skip_errata_801819 @ skip if not affected rev
mrc p15, 0, r0, c0, c0, 6 @ pick up REVIDR reg
and r0, r0, #1 << 3 @ check REVIDR[3]
cmp r0, #1 << 3
beq skip_errata_801819 @ skip erratum if REVIDR[3] is set
mrc p15, 0, r0, c1, c0, 1 @ 读取辅助控制寄存器
orr r0, r0, #3 << 27 @ Disables streaming. All write-allocate
@ lines allocate in the L1 or L2 cache.
orr r0, r0, #3 << 25 @ Disables streaming. All write-allocate
@ lines allocate in the L1 cache.
push {r1-r5} @ 保存参数信息,用于传递参数给v7_arch_cp15_set_acr函数
bl v7_arch_cp15_set_acr @跳转到v7_arch_cp15_set_acr函数中,其函数声明为:void __weak v7_arch_cp15_set_acr(u32 acr, u32 cpu_midr, u32 cpu_rev_comb, u32 cpu_variant, u32 cpu_rev)
pop {r1-r5} @ Restore the cpu info - fall through
skip_errata_801819:
#endif
#ifdef CONFIG_ARM_ERRATA_454179 CONFIG_ARM_ERRATA_798870 @未定义,忽略此段
cmp r2, #0x21 @ Only on < r2p1
bge skip_errata_454179
mrc p15, 0, r0, c1, c0, 1 @ Read ACR
orr r0, r0, #(0x3 << 6) @ Set DBSM(BIT7) and IBE(BIT6) bits
push {r1-r5} @ Save the cpu info registers
bl v7_arch_cp15_set_acr
pop {r1-r5} @ Restore the cpu info - fall through
skip_errata_454179:
#endif
#ifdef CONFIG_ARM_ERRATA_430973 @未定义,忽略此段
cmp r2, #0x21 @ Only on < r2p1
bge skip_errata_430973
mrc p15, 0, r0, c1, c0, 1 @ Read ACR
orr r0, r0, #(0x1 << 6) @ Set IBE bit
push {r1-r5} @ Save the cpu info registers
bl v7_arch_cp15_set_acr
pop {r1-r5} @ Restore the cpu info - fall through
skip_errata_430973:
#endif
#ifdef CONFIG_ARM_ERRATA_621766 @没有定义,忽略此段
cmp r2, #0x21 @ Only on < r2p1
bge skip_errata_621766
mrc p15, 0, r0, c1, c0, 1 @ Read ACR
orr r0, r0, #(0x1 << 5) @ Set L1NEON bit
push {r1-r5} @ Save the cpu info registers
bl v7_arch_cp15_set_acr
pop {r1-r5} @ Restore the cpu info - fall through
skip_errata_621766:
#endif
mov pc, r5 @ 返回
ENDPROC(cpu_init_cp15)
|
上面的代码有个很有意思的地方,来和大家分享一下,有没有发现代码中重复出现以下代码段:
1 2 3 | push {r1-r5} @ Save the cpu info registers
bl v7_arch_cp15_set_acr
pop {r1-r5} @ Restore the cpu info - fall through
|
笔者分析,这是典型的函数调用过程,全局搜索v7_arch_cp15_set_acr,在arch/arm/cpu/armv7/cp15.c有该函数的实现,如下所示:
1 2 3 4 5 | void __weak v7_arch_cp15_set_acr(u32 acr, u32 cpu_midr, u32 cpu_rev_comb,
u32 cpu_variant, u32 cpu_rev)
{
asm volatile ("mcr p15, 0, %0, c1, c0, 1\n\t" : : "r"(acr));
}
|
这是一段内嵌汇编函数,该函数主要作用是设置ACTLR(辅助控制寄存器),关于ACTLR的具体描述,大家可以参考e 《Cortex-A7 Technical ReferenceManua》,我们分析一下它是如何进行函数调用以及参数传递的。首先函数v7_arch_cp15_set_acr调用之前都进行了push入栈操作,它是将{r1-r5}这五个寄存器都压入堆栈中, 不同于x86的参数传递规则,ARM程序调用规则ATPCS(ARM-Thumb Procedure Call Standard)建议函数的形参不超过4个,如果形参个数少于或等于4,则形参由R0,R1,R2,R3四个寄存器进行传递,其中r0传递给第一个参数、r1传递给第2个……;若形参个数大于4,则大于4的部分必须通过堆栈进行传递。 显然函数v7_arch_cp15_set_acr共有5个参数acr、cpu_midr、cpu_rev_comb、cpu_variant、cpu_rev,所以大于4的部分必须通过堆栈进行传递,而这里是将{r1-r5}全都入栈了,其中{r0-r4}5个寄存器的值分别作为v7_arch_cp15_set_acr函数的5个参数 来传递,为什么不采用x86的方式都用栈传递?因为麻烦呀,而且经常入栈出栈耗时间。第4行,v7_arch_cp15_set_acr函数中有一段内嵌汇编代码,其中“%0”就是变量acr的值也就是r0寄存器中的值,也就是ACTLR寄存器,因为前面已经将ACTLR读入到r0中,并且改变了r0的值。r1存储的是MIDR(Main ID Register), MIDR提供处理器的标识信息,包括设备的实现代码和设备ID号,MIDR和其他寄存器({r2-r4})的值都没有用到,所以我们就不追究了,大概知道其调用规则即可。函数调用完后需要将调用前入栈的数据给pop(出栈)掉。
到此cpu_init_cp15函数基本上分析完了,接下来继续分析cpu_init_crit函数,代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | #ifndef CONFIG_SKIP_LOWLEVEL_INIT
/*************************************************************************
*
* CPU_init_critical registers
*
* setup important registers
* setup memory timing
*
*************************************************************************/
ENTRY(cpu_init_crit)
/*
* Jump to board specific initialization...
* The Mask ROM will have already initialized
* basic memory. Go here to bump up clock rate and handle
* wake up conditions.
*/
b lowlevel_init @ go setup pll,mux,memory
ENDPROC(cpu_init_crit)
#endif
|
第1行,如果没有定义CONFIG_SKIP_LOWLEVEL_INIT,则编译cpu_init_crit相关代码段,源码中搜索CONFIG_SKIP_LOWLEVEL_INIT,发现其确实未被定义。
第17行,跳转至lowlevel_init函数执行。
由于lowlevel_init完成了内存的初始化工作,而内存的初始化依赖于开发板,所以lowlevel_init于当前imx6u相关, lowlevel_init函数是与特定开发板相关的初始化函数,在这个函数里会做一些pll初始化, 如果不是从内存启动,则会做内存初始化,方便后续拷贝到内存中运行。 全局搜索lowlevel_init发现其在arch/arm/cpu/armv7/lowlevel_init.S文件中有定义:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 | WEAK(lowlevel_init)
/*
* Setup a temporary stack. Global data is not available yet.
*/
#if defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr sp, =CONFIG_SPL_STACK
#else
ldr sp, =CONFIG_SYS_INIT_SP_ADDR
#endif
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */
#ifdef CONFIG_SPL_DM
mov r9, #0
#else
/*
* Set up global data for boards that still need it. This will be
* removed soon.
*/
#ifdef CONFIG_SPL_BUILD
ldr r9, =gdata
#else
sub sp, sp, #GD_SIZE
bic sp, sp, #7
mov r9, sp
#endif
#endif
/*
* Save the old lr(passed in ip) and the current lr to stack
*/
push {ip, lr}
/*
* Call the very early init function. This should do only the
* absolute bare minimum to get started. It should not:
*
* - set up DRAM
* - use global_data
* - clear BSS
* - try to start a console
*
* For boards with SPL this should be empty since SPL can do all of
* this init in the SPL board_init_f() function which is called
* immediately after this.
*/
bl s_init
pop {ip, pc}
ENDPROC(lowlevel_init)
|
忽略不符合条件编译的代码。
第8行,设置栈指针指向CONFIG_SYS_INIT_SP_ADDR,而CONFIG_SYS_INIT_SP_ADDR具体是什么?它在include/configs/mx6ullevk.h文件中有如下定义:
1 2 3 4 5 6 7 8 9 10 11 | /* Physical Memory Map */
#define PHYS_SDRAM MMDC0_ARB_BASE_ADDR
#define CONFIG_SYS_SDRAM_BASE PHYS_SDRAM
#define CONFIG_SYS_INIT_RAM_ADDR IRAM_BASE_ADDR
#define CONFIG_SYS_INIT_RAM_SIZE IRAM_SIZE
#define CONFIG_SYS_INIT_SP_OFFSET \
(CONFIG_SYS_INIT_RAM_SIZE - GENERATED_GBL_DATA_SIZE)
#define CONFIG_SYS_INIT_SP_ADDR \
(CONFIG_SYS_INIT_RAM_ADDR + CONFIG_SYS_INIT_SP_OFFSET)
|
上述代码段可以总结出:CONFIG_SYS_INIT_SP_ADDR = IRAM_BASE_ADDR + (IRAM_SIZE - GENERATED_GBL_DATA_SIZE), IRAM_BASE_ADDR在arch/arm/include/asm/arch-mx6/imx-regs.h定义为0x00900000, IRAM_SIZE在arch/arm/include/asm/arch-mx6/imx-regs.h中定义为0x00020000,如下所示:
1 2 3 4 5 6 7 | #if !(defined(CONFIG_MX6SX) || \
defined(CONFIG_MX6UL) || defined(CONFIG_MX6ULL) || \
defined(CONFIG_MX6SLL) || defined(CONFIG_MX6SL))
#define IRAM_SIZE 0x00040000
#else
#define IRAM_SIZE 0x00020000
#endif
|
在.config文件中我们配置了CONFIG_MX6ULL=y,所以条件不成立,即定义IRAM_SIZE = 0x00020000,.config部分配置文件如下所示:
1 2 3 4 5 6 7 8 | CONFIG_SYS_TEXT_BASE=0x87800000
CONFIG_SYS_MALLOC_F_LEN=0x400
# CONFIG_SECURE_BOOT is not set
CONFIG_MX6=y
CONFIG_MX6ULL=y
CONFIG_LDO_BYPASS_CHECK=y
# CONFIG_MODULE_FUSE is not set
# CONFIG_TARGET_ADVANTECH_DMS_BA16 is not set
|
由此可见.config配置文件与我们的代码息息相关,大家可修改.config中的配置项来定制我们自己的u-boot,比如 修改CONFIG_BOOTDELAY=3,可以设置uboot启动延时;修改CONFIG_BAUDRATE=115200设置串口波特率。当然我们可以使用更人性化 的make menuconfig来配置u-boot,配置好后,就会在u-boot根目录下生成最新的.config文件,u-boot根据这些配置文件来决定该如何编译 u-boot源码,不多说了,继续往下分析。
GENERATED_GBL_DATA_SIZE在include/generated/generic-asm-offsets.h中定义为256,转换成十六进制为0x00000100。 故CONFIG_SYS_INIT_SP_ADDR = (0x00900000 + (0x00020000 - 0x00000100)) = 0x0091ff00。
第10行,根据英文注释可知,它是要遵从ABI的8字节对齐。
第21行,将堆栈指针减去GD_SIZE,GD_SIZE在include/generated/generic-asm-offsets.h中被定义为256,即sp = sp - 0x00000100.
第22行,和上面一样遵从ABI的8字节对齐。
第23行,将sp的值存储在r9寄存器当中。
第29行,将ip和pc压入栈中。
第44行,调用s_init函数。
第45行,将ip和pc出栈,入栈出栈是函数调用的常规操作,大家习惯就好。
全局搜索s_init,发现s_init函数为一个空的函数,里面什么也没做,如下所示:
1 2 3 | void s_init(void)
{
}
|
所以到此lowlevel_init函数就大致分析完了,lowlevel_init函数返回后,我们又回到了最初arch/arm/cpu/armv7/start.S文件中 cpu_init_crit的返回处,即接下来将进入_main函数。
1 2 3 4 5 6 | #ifndef CONFIG_SKIP_LOWLEVEL_INIT_ONLY
bl cpu_init_crit
#endif
#endif
bl _main
|
全局搜索_main,发现它在arch/arm/lib/crt0.S中有定义:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | ENTRY(_main)
/*
* Set up initial C runtime environment and call board_init_f(0).
*/
#if defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr r0, =(CONFIG_SPL_STACK)
#else
ldr r0, =(CONFIG_SYS_INIT_SP_ADDR)
#endif
bic r0, r0, #7 /* 8-byte alignment for ABI compliance */
mov sp, r0
bl board_init_f_alloc_reserve
mov sp, r0
/* set up gd here, outside any C code */
mov r9, r0
bl board_init_f_init_reserve
mov r0, #0
bl board_init_f
|
看到_main是否有一种莫名的熟悉感?其实我们在stm32中的startup_stm32f10x_hd.s文件中也能看到_main的身影, 其实它们都有点类似。上面代码中主要是初始化c语言的运行环境,众所周知,c的运行依赖函数的调用及传参等,所以不可或缺的要用到 堆栈。
第7行,不满足条件编译,忽略。
第10行,加载CONFIG_SYS_INIT_SP_ADDR到r0寄存器,CONFIG_SYS_INIT_SP_ADDR的值我们在前面已经计算过了,这里就不重复了,CONFIG_SYS_INIT_SP_ADDR = 0x0091ff00,详情参考include/configs/mx6ullevk.h文件。
第12行,遵从ABI的8字节对齐,为什么要保证堆栈8字节对齐?AAPCS规则要求堆栈保持8字节对齐。如果不对齐,调用一般的函数也是没问题的。但是当调用需要严格遵守AAPCS规则的函数时可能会出错。例如调用sprintf输出一个浮点数时,栈必须是8字节对齐的,否则结果可能会出错。
第13行,将堆栈指针指向r0寄存器的值,由于r0本就是对齐的,所以sp=0x0091ff00。
第14行,调用board_init_f_alloc_reserve函数,该函数有一个参数top,根据ARM函数调用规则,top=r0=0x0091ff00,该函数主要作用是保留早期malloc区域,且为GD(全局数据区)留出空间,函数返回值也是r0,r0保存着预留早期malloc区域和GD后的地址,r0 = 0x0091ff00 - (0x400(early malloc arena) + 0x100(GD_SIZE)) = 0x0091fa00,详情查阅common/init/board_init.c。
第17行,根据英文注释,即设置GD为r0的值,即GD地址为0x0091fa00,gd是一个保存在ARM的r9寄存器中的gd_t结构体的指针,当使用gd_t前要用DECLARE_GLOBAL_DATA_PTR来声明,以指定占用r9寄存器,这个声明可避免编译器把r9分配给其它的变量,如下所示:
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r9")
上面是定义一个寄存器全局变量指针,并指定其使用的寄存器是r9,类型为gd_t。 因为并没有定义整个全局结构体变量,编译器没有给该结构体存放区域,所以需要自己手动分配gd_t结构体 的存储地址区域,可以说gd_t结构体几乎包含了u-boot中用到的所有全局变量, gd_t和bd_t都u-boot中两个重要的数据结构,在初始化操作很多都要靠这两个数据结构来保存或传递。 gd_t结构体如下所示:
typedef struct global_data {
bd_t *bd; /* board_info结构体指针,用来保存板子信息,如波特率、ip地址、启动参数等 */
unsigned long flags; /* 用于指示的标志,如板子是否已初始化、串口是否打开 */
unsigned int baudrate; /* 串口波特率 */
unsigned long cpu_clk; /* cpu时钟频率 */
unsigned long bus_clk; /* 总线时钟频率 */
/* We cannot bracket this with CONFIG_PCI due to mpc5xxx */
unsigned long pci_clk; /* pci时钟频率 */
unsigned long mem_clk; /* 内存时钟频率 */
#if defined(CONFIG_LCD) || defined(CONFIG_VIDEO)
unsigned long fb_base; /* 如果定义了CONFIG_LCD或CONFIG_VIDEO,则此变量保存frameBuffer内存的基地址 */
#endif
#if defined(CONFIG_POST)
unsigned long post_log_word; /* Record POST activities */
unsigned long post_log_res; /* success of POST test */
unsigned long post_init_f_time; /* When post_init_f started */
#endif
#ifdef CONFIG_BOARD_TYPES
unsigned long board_type; /* 板子类型 */
#endif
unsigned long have_console; /* 用于记录串口是否已初始化 */
#if CONFIG_IS_ENABLED(PRE_CONSOLE_BUFFER)
unsigned long precon_buf_idx; /* 串口未初始化前用于保存要打印数据的缓冲区索引 */
#endif
unsigned long env_addr; /* 环境参数地址 */
unsigned long env_valid; /* 环境参数CRC校验是否有效标志 */
unsigned long env_has_init; /* Bitmask of boolean of struct env_location offsets */
int env_load_prio; /* 加载环境的优先级 */
unsigned long ram_base; /* U-Boot所占用RAM的基地址 */
unsigned long ram_top; /* Top address of RAM used by U-Boot */
unsigned long relocaddr; /* u-boot占用RAM的起始地址 */
phys_size_t ram_size; /* RAM的大小 */
unsigned long mon_len; /* monitor len */
unsigned long irq_sp; /* irq栈指针 */
unsigned long start_addr_sp; /* 栈指针起始地址 */
unsigned long reloc_off; /* 重定位偏移,就是实际定向的位置与编译连接时指定的位置之差,一般为0 */
struct global_data *new_gd; /* 新分配的全局数据区指针 */
#ifdef CONFIG_DM
struct udevice *dm_root; /* Root instance for Driver Model */
struct udevice *dm_root_f; /* Pre-relocation root instance */
struct list_head uclass_root; /* Head of core tree */
#endif
#ifdef CONFIG_TIMER
struct udevice *timer; /* Timer instance for Driver Model */
#endif
const void *fdt_blob; /* 设备树 */
void *new_fdt; /* Relocated FDT */
unsigned long fdt_size; /* Space reserved for relocated FDT */
#ifdef CONFIG_OF_LIVE
struct device_node *of_root;
#endif
#if CONFIG_IS_ENABLED(MULTI_DTB_FIT)
const void *multi_dtb_fit; /* uncompressed multi-dtb FIT image */
#endif
struct jt_funcs *jt; /* jump table */
char env_buf[32]; /* buffer for env_get() before reloc. */
#ifdef CONFIG_TRACE
void *trace_buff; /* The trace buffer */
#endif
#if defined(CONFIG_SYS_I2C)
int cur_i2c_bus; /* 当前使用的i2c总线 */
#endif
#ifdef CONFIG_SYS_I2C_MXC
void *srdata[10];
#endif
unsigned int timebase_h;
unsigned int timebase_l;
#if CONFIG_VAL(SYS_MALLOC_F_LEN)
unsigned long malloc_base; /* 早期malloc()的基地址 */
unsigned long malloc_limit; /* limit address */
unsigned long malloc_ptr; /* current address */
#endif
#ifdef CONFIG_PCI
struct pci_controller *hose; /* PCI hose for early use */
phys_addr_t pci_ram_top; /* top of region accessible to PCI */
#endif
#ifdef CONFIG_PCI_BOOTDELAY
int pcidelay_done;
#endif
struct udevice *cur_serial_dev; /* current serial device */
struct arch_global_data arch; /* architecture-specific data */
#ifdef CONFIG_CONSOLE_RECORD
struct membuff console_out; /* console output */
struct membuff console_in; /* console input */
#endif
#ifdef CONFIG_DM_VIDEO
ulong video_top; /* Top of video frame buffer area */
ulong video_bottom; /* Bottom of video frame buffer area */
#endif
#ifdef CONFIG_BOOTSTAGE
struct bootstage_data *bootstage; /* Bootstage information */
struct bootstage_data *new_bootstage; /* Relocated bootstage info */
#endif
#ifdef CONFIG_LOG
int log_drop_count; /* Number of dropped log messages */
int default_log_level; /* For devices with no filters */
struct list_head log_head; /* List of struct log_device */
int log_fmt; /* Mask containing log format info */
#endif
#if CONFIG_IS_ENABLED(BLOBLIST)
struct bloblist_hdr *bloblist; /* Bloblist information */
struct bloblist_hdr *new_bloblist; /* Relocated blolist info */
# ifdef CONFIG_SPL
struct spl_handoff *spl_handoff;
# endif
#endif
} gd_t;
bd_t结构体如下所示:
typedef struct bd_info {
unsigned long bi_memstart; /* DRAM起始地址 */
phys_size_t bi_memsize; /* DRAM大小(单位:字节) */
unsigned long bi_flashstart; /* flash起始地址 */
unsigned long bi_flashsize; /* flash大小 */
unsigned long bi_flashoffset; /* reserved area for startup monitor */
unsigned long bi_sramstart; /* SRAM起始地址 */
unsigned long bi_sramsize; /* SRAM大小 */
#ifdef CONFIG_ARM
unsigned long bi_arm_freq; /* arm频率 */
unsigned long bi_dsp_freq; /* dsp核频率 */
unsigned long bi_ddr_freq; /* ddr频率 */
#endif
#if defined(CONFIG_MPC8xx) || defined(CONFIG_E500) || defined(CONFIG_MPC86xx)
unsigned long bi_immr_base; /* base of IMMR register */
#endif
#if defined(CONFIG_M68K)
unsigned long bi_mbar_base; /* base of internal registers */
#endif
#if defined(CONFIG_MPC83xx)
unsigned long bi_immrbar;
#endif
unsigned long bi_bootflags; /* boot / reboot flag (Unused) */
unsigned long bi_ip_addr; /* IP Address */
unsigned char bi_enetaddr[6]; /* OLD: see README.enetaddr */
unsigned short bi_ethspeed; /* Ethernet speed in Mbps */
unsigned long bi_intfreq; /* Internal Freq, in MHz */
unsigned long bi_busfreq; /* Bus Freq, in MHz */
#if defined(CONFIG_CPM2)
unsigned long bi_cpmfreq; /* CPM_CLK Freq, in MHz */
unsigned long bi_brgfreq; /* BRG_CLK Freq, in MHz */
unsigned long bi_sccfreq; /* SCC_CLK Freq, in MHz */
unsigned long bi_vco; /* VCO Out from PLL, in MHz */
#endif
#if defined(CONFIG_M68K)
unsigned long bi_ipbfreq; /* IPB Bus Freq, in MHz */
unsigned long bi_pcifreq; /* PCI Bus Freq, in MHz */
#endif
#if defined(CONFIG_EXTRA_CLOCK)
unsigned long bi_inpfreq; /* input Freq in MHz */
unsigned long bi_vcofreq; /* vco Freq in MHz */
unsigned long bi_flbfreq; /* Flexbus Freq in MHz */
#endif
#ifdef CONFIG_HAS_ETH1
unsigned char bi_enet1addr[6]; /* OLD: see README.enetaddr */
#endif
#ifdef CONFIG_HAS_ETH2
unsigned char bi_enet2addr[6]; /* OLD: see README.enetaddr */
#endif
#ifdef CONFIG_HAS_ETH3
unsigned char bi_enet3addr[6]; /* OLD: see README.enetaddr */
#endif
#ifdef CONFIG_HAS_ETH4
unsigned char bi_enet4addr[6]; /* OLD: see README.enetaddr */
#endif
#ifdef CONFIG_HAS_ETH5
unsigned char bi_enet5addr[6]; /* OLD: see README.enetaddr */
#endif
ulong bi_arch_number; /* unique id for this board */
ulong bi_boot_params; /* where this board expects params */
#ifdef CONFIG_NR_DRAM_BANKS
struct { /* RAM BANKS 配置,起始地址和长度 */
phys_addr_t start;
phys_size_t size;
} bi_dram[CONFIG_NR_DRAM_BANKS];
#endif /* CONFIG_NR_DRAM_BANKS */
} bd_t;
第18行,调用board_init_f_init_reserve函数,该函数主要作用是将GD区域清零,返回最初malloc区域的地址,即 0x0091fb00 = 0x0091fa00 + 0x100(GD_SIZE)。
第20~22行,清空r0,然后把参数r0传给board_init_f函数,并调用board_init_f。
总结:初始化c语言环境,以便调用board_init_f函数。这个环境只提供了一个堆栈和一个存储GD(全局数据)结构的地方,两者都位于一些可用的RAM中。在调用board_init_f()之前,GD应该被归零。
继续分析board_init_f:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | void board_init_f(ulong boot_flags)
{
gd->flags = boot_flags;
gd->have_console = 0;
if (initcall_run_list(init_sequence_f))
hang();
#if !defined(CONFIG_ARM) && !defined(CONFIG_SANDBOX) && \
!defined(CONFIG_EFI_APP) && !CONFIG_IS_ENABLED(X86_64) && \
!defined(CONFIG_ARC)
/* NOTREACHED - jump_to_copy() does not return */
hang();
#endif
}
|
第3行,设置dg的标志为0,boot_flags是board_init_f函数调用前r0的值(0x0)。
第4行,标记dg的have_console为0,表示我们还没有初始化串口。
第6行,调用initcall_run_list()初始化uboot的前半段。
接着我们分析一下initcall_run_list。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 | DECLARE_GLOBAL_DATA_PTR;
static inline int initcall_run_list(const init_fnc_t init_sequence[])
{
const init_fnc_t *init_fnc_ptr; /* 定义函数指针 */
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
unsigned long reloc_ofs = 0;
int ret;
if (gd->flags & GD_FLG_RELOC)
reloc_ofs = gd->reloc_off;
#ifdef CONFIG_EFI_APP /* 没有定义,忽略 */
reloc_ofs = (unsigned long)image_base;
#endif
debug("initcall: %p", (char *)*init_fnc_ptr - reloc_ofs);
if (gd->flags & GD_FLG_RELOC)
debug(" (relocated to %p)\n", (char *)*init_fnc_ptr);
else
debug("\n");
ret = (*init_fnc_ptr)();
if (ret) {
printf("initcall sequence %p failed at call %p (err=%d)\n",
init_sequence,
(char *)*init_fnc_ptr - reloc_ofs, ret);
return -1;
}
}
return 0;
}
|
第1行,和前面我们讲的DECLARE_GLOBAL_DATA_PTR定义gd一样,要想用gd先定义。
第7行,遍历执行函数指针数组init_sequence[]里面放的所有函数。
第21行,取出函数指针数组init_sequence[]里面函数,一个一个地执行,并测试其返回值。
然后你是否会对函数指针数组init_sequence[]比较感兴趣,反正我是迫不及待地想看看其庐山真面目,那么我们就一起 点进去逛逛吧!init_sequence_f[]比较长,为了方便阅读,我们把不符合条件编译的代码段忽略了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 | static const init_fnc_t init_sequence_f[] = {
setup_mon_len, /* 设置gd->mon_len为编译出来的u-boot.bin+bss段的大小 */
fdtdec_setup, /* 和设备树有关 */
initf_malloc, /* 初始化并设置内存池 */
log_init, /* log初始化 */
initf_bootstage, /* 用于记录board_init_f()的引导阶段 */
setup_spl_handoff,
initf_console_record, /* 平台信息记录初始化 */
arch_cpu_init, /* 空函数 */
mach_cpu_init, /* 空函数 */
initf_dm, /* 驱动模型初始化 */
arch_cpu_init_dm, /* 空函数 */
board_early_init_f, /* 设置时钟和GPIO */
timer_init, /* 定时器初始化 */
env_init, /* 找到最适合存放环境变量的地址,并初始化 */
init_baud_rate, /* 波特率初始化 */
serial_init, /* 串口初始化 */
console_init_f, /* 使能在重定位之前用的串口功能 gd->have_console = 1 */
display_options, /* 显示banner,如u-boot版本、编译时间等信息 */
display_text_info, /* 显示调试信息 */
print_cpuinfo, /* 显示cpu信息,如cpu速度 */
show_board_info, /* 显示板子信息 */
announce_dram_init, /* 准备显示DRAM大小,在u-boot启动时可以看到DRAM大小的信息 */
dram_init, /* DRAM初始化,对于本imx6ull设置dg->ram_size = 512 MiB */
setup_dest_addr, /* 设置重定位地址,gd->relocaddr = gd->ram_top */
reserve_round_4k, /* 4字节对齐,将内存指针调到下一个4 kB */
reserve_mmu, /* 为mmu区域腾出空间 */
reserve_video, /* 预留video显示内存 */
reserve_trace,
reserve_uboot, /* 预留U-Boot代码、data和bss区 */
reserve_malloc, /* 预留malloc区 */
reserve_board, /* 预留存放板子信息区 */
setup_machine, /* 板子ID,这里没有用到 */
reserve_global_data, /* 预留GD区域,栈gd->start_addr_sp指向gd段基地址*/
reserve_fdt, /* 预留设备树区域 */
reserve_bootstage,
reserve_bloblist,
reserve_arch, /* 架构相关预留区 */
reserve_stacks, /* 预留栈区,gd->start_addr_sp指向栈底基地址 */
dram_init_banksize, /* DRAM的大小初始化 */
show_dram_config, /* 显示DRAM的配置 */
display_new_sp, /* 显示新的栈地址 */
reloc_fdt, /* 和设备树有关 */
reloc_bootstage, /* 和u-boot阶段有关 */
reloc_bloblist, /* 和blob列表有关 */
setup_reloc, /* 重定位 */
NULL,
};
|
上面函数指针数组init_sequence[]里面的函数都和大家梳理了一遍,花了我好大一会功夫。 但是光知道函数名字还不透彻,下面我们就init_sequence[],大致介绍一下某些重要函数在内存中究竟做了什么?
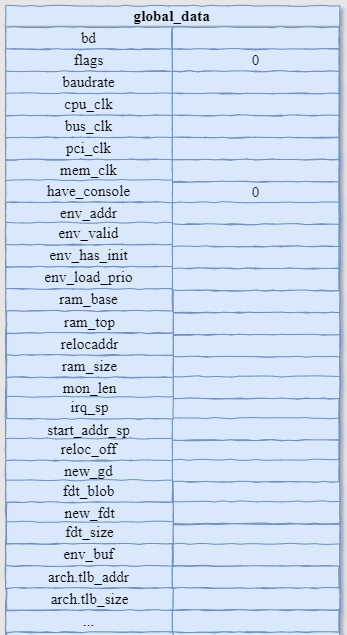
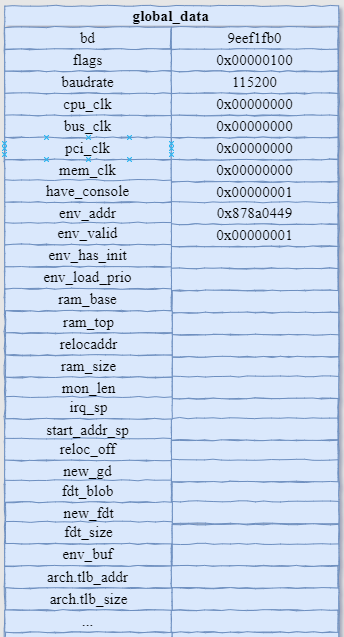
起初我们的gd成员如下图所示:
setup_mon_len函数比较简单,它是根据.lds文件中__bss_end与__bss_end计算出u-boot本身的大,赋给gd->mon_len变量。
fdtdec_setup函数,检查gd->fdt_blob处是否存在dtb,我们来看下调试信息中gd->fdt_blob地址是否有存放设备树。
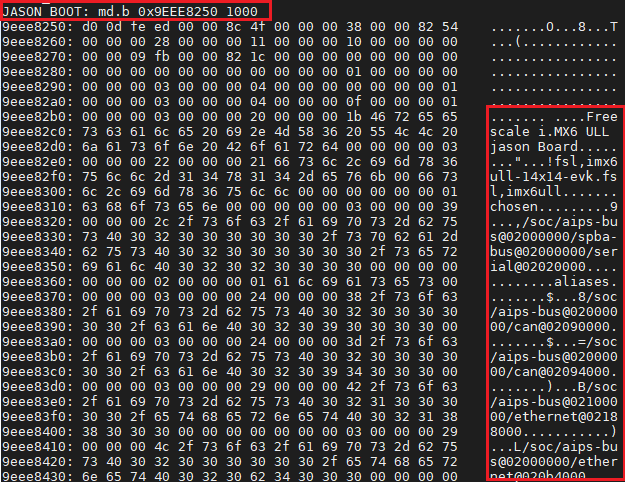
通过上图发现gd->fdt_blob确实指向了设备树相关信息处。
env_init函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 | int env_init(void)
{
struct env_driver *drv;
int ret = -ENOENT;
int prio;
for (prio = 0; (drv = env_driver_lookup(ENVOP_INIT, prio)); prio++) {
if (!drv->init || !(ret = drv->init()))
env_set_inited(drv->location);
debug("%s: Environment %s init done (ret=%d)\n", __func__,
drv->name, ret);
}
if (!prio)
return -ENODEV;
if (ret == -ENOENT) {
gd->env_addr = (ulong)&default_environment[0]; /* default_environment[0]用于存放默认环境变量的数组 */
gd->env_valid = ENV_VALID; /* ENV_VALID = 1 标志环境有效 */
return 0;
}
return ret;
}
|
第9行,标记已经初始化环境变量。
第19行,default_environment[]数组存放着默认的环境变量,此段代码的意思是将默认环境变量default_environment的地址赋值给全局变量gd->env_addr,该数组在include/env_default.h文件中有如下定义:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 | const uchar default_environment[] = {
#endif
#ifndef CONFIG_USE_DEFAULT_ENV_FILE
#ifdef CONFIG_ENV_CALLBACK_LIST_DEFAULT
ENV_CALLBACK_VAR "=" CONFIG_ENV_CALLBACK_LIST_DEFAULT "\0"
#endif
#ifdef CONFIG_ENV_FLAGS_LIST_DEFAULT
ENV_FLAGS_VAR "=" CONFIG_ENV_FLAGS_LIST_DEFAULT "\0"
#endif
#ifdef CONFIG_USE_BOOTARGS
"bootargs=" CONFIG_BOOTARGS "\0"
#endif
#ifdef CONFIG_BOOTCOMMAND
"bootcmd=" CONFIG_BOOTCOMMAND "\0"
#endif
#ifdef CONFIG_RAMBOOTCOMMAND
"ramboot=" CONFIG_RAMBOOTCOMMAND "\0"
#endif
#ifdef CONFIG_NFSBOOTCOMMAND
"nfsboot=" CONFIG_NFSBOOTCOMMAND "\0"
#endif
#if defined(CONFIG_BOOTDELAY)
"bootdelay=" __stringify(CONFIG_BOOTDELAY) "\0"
#endif
#if defined(CONFIG_BAUDRATE) && (CONFIG_BAUDRATE >= 0)
"baudrate=" __stringify(CONFIG_BAUDRATE) "\0"
#endif
#ifdef CONFIG_LOADS_ECHO
"loads_echo=" __stringify(CONFIG_LOADS_ECHO) "\0"
#endif
#ifdef CONFIG_ETHPRIME
"ethprime=" CONFIG_ETHPRIME "\0"
#endif
#ifdef CONFIG_IPADDR
"ipaddr=" __stringify(CONFIG_IPADDR) "\0"
#endif
#ifdef CONFIG_SERVERIP
"serverip=" __stringify(CONFIG_SERVERIP) "\0"
#endif
#ifdef CONFIG_SYS_AUTOLOAD
"autoload=" CONFIG_SYS_AUTOLOAD "\0"
#endif
#ifdef CONFIG_PREBOOT
"preboot=" CONFIG_PREBOOT "\0"
#endif
#ifdef CONFIG_ROOTPATH
"rootpath=" CONFIG_ROOTPATH "\0"
#endif
#ifdef CONFIG_GATEWAYIP
"gatewayip=" __stringify(CONFIG_GATEWAYIP) "\0"
#endif
#ifdef CONFIG_NETMASK
"netmask=" __stringify(CONFIG_NETMASK) "\0"
#endif
#ifdef CONFIG_HOSTNAME
"hostname=" CONFIG_HOSTNAME "\0"
#endif
#ifdef CONFIG_BOOTFILE
"bootfile=" CONFIG_BOOTFILE "\0"
#endif
#ifdef CONFIG_LOADADDR
"loadaddr=" __stringify(CONFIG_LOADADDR) "\0"
#endif
#ifdef CONFIG_CLOCKS_IN_MHZ
"clocks_in_mhz=1\0"
#endif
#if defined(CONFIG_PCI_BOOTDELAY) && (CONFIG_PCI_BOOTDELAY > 0)
"pcidelay=" __stringify(CONFIG_PCI_BOOTDELAY)"\0"
#endif
#ifdef CONFIG_ENV_VARS_UBOOT_CONFIG
"arch=" CONFIG_SYS_ARCH "\0"
#ifdef CONFIG_SYS_CPU
"cpu=" CONFIG_SYS_CPU "\0"
#endif
#ifdef CONFIG_SYS_BOARD
"board=" CONFIG_SYS_BOARD "\0"
"board_name=" CONFIG_SYS_BOARD "\0"
#endif
#ifdef CONFIG_SYS_VENDOR
"vendor=" CONFIG_SYS_VENDOR "\0"
#endif
#ifdef CONFIG_SYS_SOC
"soc=" CONFIG_SYS_SOC "\0"
#endif
#endif
#if defined(CONFIG_BOOTCOUNT_BOOTLIMIT) && (CONFIG_BOOTCOUNT_BOOTLIMIT > 0)
"bootlimit=" __stringify(CONFIG_BOOTCOUNT_BOOTLIMIT)"\0"
#endif
#ifdef CONFIG_EXTRA_ENV_SETTINGS
CONFIG_EXTRA_ENV_SETTINGS
#endif
"\0"
#else /* CONFIG_USE_DEFAULT_ENV_FILE */
#include "generated/defaultenv_autogenerated.h"
#endif
#ifdef DEFAULT_ENV_INSTANCE_EMBEDDED
}
|
比如默认环境变量可以根据宏定义去配置默认的环境变量,如bootargs、bootcmd、bootdelay等, bootdelay对应的宏CONFIG_BOOTDELAY在include/generated/autoconf.h文件中可以设置,修改该宏 便可以设置默认的u-boot延时时间。在imx6ull EVK pro中并没用使用默认的环境变量,而是使用的 configs/mx6ull_npi_defconfig配置文件中的环境变量,修改该配置文件中的CONFIG_BOOTDELAY=5,编译 运行,则可以看到u-boot的启动检测输入延时为5秒,如下图所示:

其中宏CONFIG_EXTRA_ENV_SETTINGS包含了我们include/configs/npi_common.h文件中的大多数环境变量,也包含fire-config中的/boot/uEnv.txt配置文件。
第20行,标记环境变量有效,gd->env_valid = ENV_VALID = 1。
init_baud_rate函数:
1 2 3 4 5 | static int init_baud_rate(void)
{
gd->baudrate = env_get_ulong("baudrate", 10, CONFIG_BAUDRATE); /* CONFIG_BAUDRATE = 115200 设置波特率*/
return 0;
}
|
1. 第3行,调用env_get_ulong函数获取环境变量中波特率的参数,env_get_ulong函数通过第一个参数”baudrate”来匹配 默认环境变量中的”baudrate”,其实就是匹配数组default_environment[]中的波特率,第二个参数表示按照十进制基数获取,如果没有匹配到,就会采用第三个参数的值作为默认波特率。
serial_init函数:
1 2 3 4 5 | int serial_init(void)
{
gd->flags |= GD_FLG_SERIAL_READY; /* GD_FLG_SERIAL_READY = 0x00100 标志串口就绪 */
return get_current()->start();
}
|
第3行,设置gd->flags,表示串口已经准备好了。
第4行,get_current()->start()返回一个指向当前被选择的串口的指针,我们来分析一下get_current函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | static struct serial_device *get_current(void)
{
struct serial_device *dev;
if (!(gd->flags & GD_FLG_RELOC))
dev = default_serial_console();
else if (!serial_current)
dev = default_serial_console();
else
dev = serial_current;
/* We must have a console device */
if (!dev) {
#ifdef CONFIG_SPL_BUILD
puts("Cannot find console\n");
hang();
#else
panic("Cannot find console\n");
#endif
}
return dev;
}
|
该函数第4~5行,首先判断gd->flags有没有GD_FLG_RELOC标志,如果没有就获取默认的串口结构体地址,最后返回。 其结构体如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | struct serial_device {
/* enough bytes to match alignment of following func pointer */
char name[16];
int (*start)(void);
int (*stop)(void);
void (*setbrg)(void);
int (*getc)(void);
int (*tstc)(void);
void (*putc)(const char c);
void (*puts)(const char *s);
#if CONFIG_POST & CONFIG_SYS_POST_UART
void (*loop)(int);
#endif
struct serial_device *next;
};
|
初始化的每个串口都被分配这么一个结构体。
console_init_f函数:
1 2 3 4 5 6 7 8 9 10 11 | /* Called before relocation - use serial functions */
int console_init_f(void)
{
gd->have_console = 1;
console_update_silent();
print_pre_console_buffer(PRE_CONSOLE_FLUSHPOINT1_SERIAL);
return 0;
}
|
以上函数都被执行后,gd是这样子的:
display_options函数:
1 2 3 4 5 6 7 8 9 10 | int display_options(void)
{
char buf[DISPLAY_OPTIONS_BANNER_LENGTH];
display_options_get_banner(true, buf, sizeof(buf));
printf("%s", buf);
printf("%s", buf);
printf("%s", "hello u-boot ! i am here (^-^)");
return 0;
}
|
第5行,在u-boot启动时显示横幅,其中第6~8行是我为了调试自己添加的,调试信息如下所示:

display_text_info函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | static int display_text_info(void)
{
#if !defined(CONFIG_SANDBOX) && !defined(CONFIG_EFI_APP)
ulong bss_start, bss_end, text_base;
bss_start = (ulong)&__bss_start;
bss_end = (ulong)&__bss_end;
#ifdef CONFIG_SYS_TEXT_BASE
text_base = CONFIG_SYS_TEXT_BASE;
#else
text_base = CONFIG_SYS_MONITOR_BASE;
#endif
debug("=========================888888888888888888888888888888==========================\r\n");
debug("U-Boot code: %08lX -> %08lX BSS: -> %08lX\n",
text_base, bss_start, bss_end);
#endif
return 0;
}
|
第6~7行,获取lds文件中__bss_start与__bss_end的地址,也就是BSS段的起始地址与末尾地址。
第9~10行,通过宏CONFIG_SYS_TEXT_BASE得到代码段的基地址,该宏在include/generated/autoconf.h文件中被定义为0x87800000。
第15~16行,打印出代码段基地址、BSS段起始地址以及BSS段末尾地址,打印信息如下图所示:

继续分析show_board_info函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | /*
* If the root node of the DTB has a "model" property, show it.
* Then call checkboard().
*/
int __weak show_board_info(void)
{
#ifdef CONFIG_OF_CONTROL
DECLARE_GLOBAL_DATA_PTR;
const char *model;
model = fdt_getprop(gd->fdt_blob, 0, "model", NULL);
printf("++++++++++++++++++++++++++++++++++++++++++\r\n");
if (model)
printf("Model: %s\n", model);
#endif
return checkboard();
}
|
第11行,调用fdt_getprop函数,通过设备树地址gd->fdt_blob找到名字为“model”对应的板子信息。以imx6ull EVK pro开发板为例,其对应的设备树文件为arch/arm/dts/imx6ull-14x14-evk.dts,文件中有关于板子model信息的描述,用户可以根据需要修改此信息。
第14行,打印板子信息,为了在uboot启动时方便找到这条打印信息,我自己添加了第13行,打印信息如下图所示:

announce_dram_init函数:
1 2 3 4 5 | static int announce_dram_init(void)
{
puts("DRAM: ");
return 0;
}
|
announce_dram_init函数预先打印“DRAM”,dram_init便紧接着初始化DRAM,打印信息如下:

dram_init函数用于获取DRAM大小
1 2 3 4 5 6 | int dram_init(void)
{
gd->ram_size = imx_ddr_size();
debug("DRAM大小为:\r\n", gd->ram_size);
return 0;
}
|
第3行,获取DRAM大小。
第4行,这行是我自己添加的,方便调试,调试信息如下所示:

可见DRAM大小为0x20000000,也就是512M,说明我们现在用的是512M的DDR。
setup_dest_addr函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 | static int setup_dest_addr(void)
{
debug("Monitor len: %08lX\n", gd->mon_len);
/*
* Ram is setup, size stored in gd !!
*/
debug("Ram size: %08lX\n", (ulong)gd->ram_size);
#if defined(CONFIG_SYS_MEM_TOP_HIDE)
/*
* Subtract specified amount of memory to hide so that it won't
* get "touched" at all by U-Boot. By fixing up gd->ram_size
* the Linux kernel should now get passed the now "corrected"
* memory size and won't touch it either. This should work
* for arch/ppc and arch/powerpc. Only Linux board ports in
* arch/powerpc with bootwrapper support, that recalculate the
* memory size from the SDRAM controller setup will have to
* get fixed.
*/
gd->ram_size -= CONFIG_SYS_MEM_TOP_HIDE;
#endif
#ifdef CONFIG_SYS_SDRAM_BASE
gd->ram_base = CONFIG_SYS_SDRAM_BASE;
#endif
gd->ram_top = gd->ram_base + get_effective_memsize();
gd->ram_top = board_get_usable_ram_top(gd->mon_len);
gd->relocaddr = gd->ram_top;
debug("Ram top: %08lX\n", (ulong)gd->ram_top);
#if defined(CONFIG_MP) && (defined(CONFIG_MPC86xx) || defined(CONFIG_E500))
/*
* We need to make sure the location we intend to put secondary core
* boot code is reserved and not used by any part of u-boot
*/
if (gd->relocaddr > determine_mp_bootpg(NULL)) {
gd->relocaddr = determine_mp_bootpg(NULL);
debug("Reserving MP boot page to %08lx\n", gd->relocaddr);
}
#endif
return 0;
}
|
第26~27行,打印RAM顶端地址gd->ram_top = gd->relocaddr = 0xa0000000。
DRAM初始化后,便完成DRAM的映射,重定位代码到DRAM,并且在DRAM中继续运行。
以上函数执行完毕后,我们再回过头看下gd结构体的成员,如下图所示:
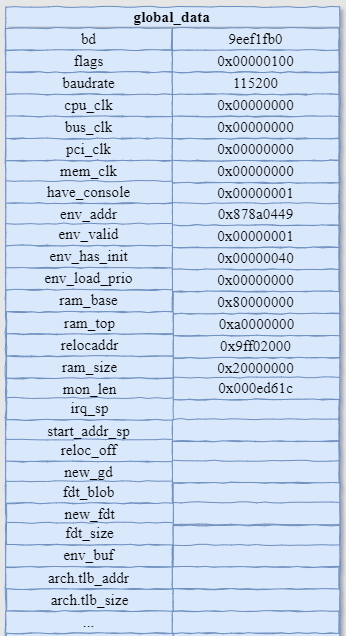
图中可以看到,DRAM的基地址为0x80000000,大小为0x20000000(512M),RAM顶端地址为0xa0000000 = 0x80000000 + 0x20000000(512M)。 重定位后地址为0x9ff02000。
reserve_round_4k函数:
1 2 3 4 5 6 | /* Round memory pointer down to next 4 kB limit */
static int reserve_round_4k(void)
{
gd->relocaddr &= ~(4096 - 1);
return 0;
}
|
第4行,将内存指针指向下一个4kB处,也就是4kB对齐,gd->relocaddr = 0xa0000000 & 0xfffff000 = 0xa0000000,所以对齐后gd->relocaddr不变。
reserve_mmu函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | #ifdef CONFIG_ARM
__weak int reserve_mmu(void)
{
#if !(defined(CONFIG_SYS_ICACHE_OFF) && defined(CONFIG_SYS_DCACHE_OFF))
/* reserve TLB table */
gd->arch.tlb_size = PGTABLE_SIZE;
gd->relocaddr -= gd->arch.tlb_size; /* 从oxa0000000向下少了4K */
debug("gd->relocaddr= %08lx to %08lx\n", gd->relocaddr,gd->arch.tlb_size);
/* round down to next 64 kB limit */
gd->relocaddr &= ~(0x10000 - 1);
gd->arch.tlb_addr = gd->relocaddr;
debug("TLB table from %08lx to %08lx\n", gd->arch.tlb_addr,
gd->arch.tlb_addr + gd->arch.tlb_size);
#ifdef CONFIG_SYS_MEM_RESERVE_SECURE
/*
* Record allocated tlb_addr in case gd->tlb_addr to be overwritten
* with location within secure ram.
*/
gd->arch.tlb_allocated = gd->arch.tlb_addr;
#endif
#endif
return 0;
}
#endif
|
第1行,CONFIG_ARM在include/generated/autoconf.h文件中被定义为1,故reserve_mmu函数被执行。
第4行,我们没有定义CONFIG_SYS_ICACHE_OFF和CONFIG_SYS_DCACHE_OFF,故其相关代码块被执行。
第6行,为TLB页表腾出空间,PGTABLE_SIZE为0x00004000 = 4096 * 4,它在arch/arm/include/asm/system.h文件中有如下定义:
1 | #define PGTABLE_SIZE (4096 * 4) /* PGTABLE_SIZE = 0x00004000 = 4096 * 4 */
|
第7~8行,重定位地址gd->relocaddr = 0xfffc000 = 0xA0000000 - 4kB,第8行是我自己添加的,我们来看下它的打印信息:

第10行,四舍五入到下一个64kB,也就是做64kB对齐,页表必须64k对齐存放,即gd->relocaddr = 0xa0000000 - 0x00004000 = 9fffc000。
第16行,CONFIG_SYS_MEM_RESERVE_SECURE没有定义,忽略相关代码块。
reserve_mmu函数主要是预留出4kB空间来存放mmu的TLB页表。
reserve_video和reserve_trace都没有做什么工作,我们不用分析,接着我们来分析reserve_uboot函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | static int reserve_uboot(void)
{
if (!(gd->flags & GD_FLG_SKIP_RELOC)) {
/*
* reserve memory for U-Boot code, data & bss
* round down to next 4 kB limit
*/
gd->relocaddr -= gd->mon_len;
gd->relocaddr &= ~(4096 - 1);
#if defined(CONFIG_E500) || defined(CONFIG_MIPS)
/* round down to next 64 kB limit so that IVPR stays aligned */
gd->relocaddr &= ~(65536 - 1);
#endif
debug("&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&\r\n");
debug("Reserving %ldk for U-Boot at: %08lx\n",
gd->mon_len >> 10, gd->relocaddr);
}
gd->start_addr_sp = gd->relocaddr; /* 将start_addr_sp也置为相同的位置 */
debug("gd->start_addr_sp= %08lx\n",gd->start_addr_sp);
return 0;
}
|
第8~9行,预留出949kB给u-Boot,同时做4kB对齐。
第14行,我自己添加的,方便调试。
第15行,打印信息如下图所示:

reserve_malloc函数:
1 2 3 4 5 6 7 8 9 | /* reserve memory for malloc() area */
static int reserve_malloc(void)
{
gd->start_addr_sp = gd->start_addr_sp - TOTAL_MALLOC_LEN;
debug("TOTAL_MALLOC_LEN: %08lx\n", TOTAL_MALLOC_LEN);
debug("Reserving %dk for malloc() at: %08lx\n",
TOTAL_MALLOC_LEN >> 10, gd->start_addr_sp);
return 0;
}
|
第4行,为malloc腾出一段空间,TOTAL_MALLOC_LEN大小在include/common.h文件中有如下定义:
1 2 3 4 5 6 7 8 9 | #if defined(CONFIG_ENV_IS_EMBEDDED) /* 未定义 */
#define TOTAL_MALLOC_LEN CONFIG_SYS_MALLOC_LEN
#elif ( ((CONFIG_ENV_ADDR+CONFIG_ENV_SIZE) < CONFIG_SYS_MONITOR_BASE) || \
(CONFIG_ENV_ADDR >= (CONFIG_SYS_MONITOR_BASE + CONFIG_SYS_MONITOR_LEN)) ) || \
defined(CONFIG_ENV_IS_IN_NVRAM) /* 有定义 */
#define TOTAL_MALLOC_LEN (CONFIG_SYS_MALLOC_LEN + CONFIG_ENV_SIZE) /* 只有该行通过条件编译 */
#else
#define TOTAL_MALLOC_LEN CONFIG_SYS_MALLOC_LEN
#endif
|
可以看出,TOTAL_MALLOC_LEN = CONFIG_SYS_MALLOC_LEN + CONFIG_ENV_SIZE。而CONFIG_SYS_MALLOC_LEN和CONFIG_ENV_SIZE在 include/configs/mx6ullevk.h文件中有如下定义:
1 2 3 4 | /* Size of malloc() pool */
#define CONFIG_SYS_MALLOC_LEN (16 * SZ_1M) /* SZ_1M在include/linux/sizes.h中被定义为0x00100000 */
... /* 省略部分代码块 */
#define CONFIG_ENV_SIZE SZ_64K /* SZ_64K在include/linux/sizes.h中被定义为0x00010000 */
|
由上可知,TOTAL_MALLOC_LEN = (16 * 0x00100000) + 0x00010000 = 0x01010000,我们接着分析reserve_malloc函数。
第5~7行,为了验证TOTAL_MALLOC_LEN的大小,我自己添加第5行,用来调试,第6~7行是源码本有的,他们的调试信息如下:

此时gd->start_addr_sp = 0x9eef2000,预留了16448kB给malloc,都是从高地址往下不断预留空间。
reserve_board函数:
1 2 3 4 5 6 7 8 9 10 11 12 | /* (permanently) allocate a Board Info struct */
static int reserve_board(void)
{
if (!gd->bd) {
gd->start_addr_sp -= sizeof(bd_t);
gd->bd = (bd_t *)map_sysmem(gd->start_addr_sp, sizeof(bd_t));
memset(gd->bd, '\0', sizeof(bd_t));
debug("Reserving %zu Bytes for Board Info at: %08lx\n",
sizeof(bd_t), gd->start_addr_sp);
}
return 0;
}
|
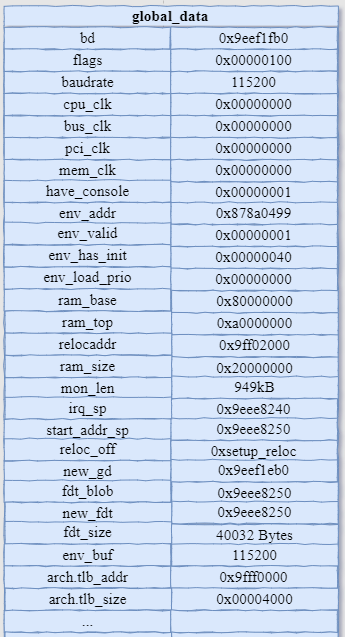
第5行,给bd预留空间,存放板子信息,如DRAM起始地址、DRAM大小、SRAM起始地址、SRAM大小、boot参数等,共预留了80字节,预留后gd->start_addr_sp = 0x9eef1fb0,如下图所示:

setup_machine是个空函数,跳过它继续分析reserve_global_data函数:
1 2 3 4 5 6 7 8 | static int reserve_global_data(void)
{
gd->start_addr_sp -= sizeof(gd_t);
gd->new_gd = (gd_t *)map_sysmem(gd->start_addr_sp, sizeof(gd_t));
debug("Reserving %zu Bytes for Global Data at: %08lx\n",
sizeof(gd_t), gd->start_addr_sp);
return 0;
}
|
第3~4行,预留256字节给new_gd(新的全局数据),预留后gd->start_addr_sp = 0x9eef1eb0,调试信息如下:

reserve_fdt函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | static int reserve_fdt(void)
{
#ifndef CONFIG_OF_EMBED
/*
* If the device tree is sitting immediately above our image then we
* must relocate it. If it is embedded in the data section, then it
* will be relocated with other data.
*/
if (gd->fdt_blob) {
gd->fdt_size = ALIGN(fdt_totalsize(gd->fdt_blob) + 0x1000, 32);
gd->start_addr_sp -= gd->fdt_size;
gd->new_fdt = map_sysmem(gd->start_addr_sp, gd->fdt_size);
debug("Reserving %lu Bytes for FDT at: %08lx\n",
gd->fdt_size, gd->start_addr_sp);
}
#endif
return 0;
}
|
第12行,预留40032字节存放设备树信息。
reserve_bootstage、reserve_bloblist、reserve_arch、dram_init_banksize都是空函数,所以到此内存就已经分配完了。
而reloc_fdt函数负责将设备树数据搬运到新分配的new_fdt地址中去,如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 | static int reloc_fdt(void)
{
#ifndef CONFIG_OF_EMBED /* 有定义 */
if (gd->flags & GD_FLG_SKIP_RELOC)
return 0;
if (gd->new_fdt) {
memcpy(gd->new_fdt, gd->fdt_blob, gd->fdt_size);
gd->fdt_blob = gd->new_fdt;
}
#endif
return 0;
}
|
第7行,将老的设备树段拷贝到新的设备树段。
第8行,将老的设备树地址更新为新的设备树地址。
setup_reloc 函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 | static int setup_reloc(void)
{
if (gd->flags & GD_FLG_SKIP_RELOC) {
debug("Skipping relocation due to flag\n");
return 0;
}
#ifdef CONFIG_SYS_TEXT_BASE
#ifdef ARM
gd->reloc_off = gd->relocaddr - (unsigned long)__image_copy_start;
#elif defined(CONFIG_M68K)
/*
* On all ColdFire arch cpu, monitor code starts always
* just after the default vector table location, so at 0x400
*/
gd->reloc_off = gd->relocaddr - (CONFIG_SYS_TEXT_BASE + 0x400);
#else
gd->reloc_off = gd->relocaddr - CONFIG_SYS_TEXT_BASE;
#endif
#endif
memcpy(gd->new_gd, (char *)gd, sizeof(gd_t)); /* 将gd重定位到new_gd中 */
debug("Relocation Offset is: %08lx\n", gd->reloc_off);
debug("Relocating to %08lx, new gd at %08lx, sp at %08lx\n",
gd->relocaddr, (ulong)map_to_sysmem(gd->new_gd),
gd->start_addr_sp);
return 0;
}
|
第18行,计算新旧uboot的偏移,便宜值为0x18702000。
第21行,将gd重定位到new_gd中。
我们再回过头来看看此时的全局数据表格:
board_init_f中的内容就已经分析完了,接下来就剩下uboot自身的重定位和bss段的初始化。 接下来我们看看u-boot中重要的函数relocate_code,它是如何实现u-boot自身重定位的。
relocate_code函数分析:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 | ENTRY(relocate_code)
ldr r1, =__image_copy_start /* r1 <- SRC &__image_copy_start */
subs r4, r0, r1 /* r4 <- relocation offset */
beq relocate_done /* skip relocation */
ldr r2, =__image_copy_end /* r2 <- SRC &__image_copy_end */
copy_loop:
ldmia r1!, {r10-r11} /* copy from source address [r1] */
stmia r0!, {r10-r11} /* copy to target address [r0] */
cmp r1, r2 /* until source end address [r2] */
blo copy_loop
/*
* fix .rel.dyn relocations
*/
ldr r2, =__rel_dyn_start /* r2 <- SRC &__rel_dyn_start */
ldr r3, =__rel_dyn_end /* r3 <- SRC &__rel_dyn_end */
fixloop:
ldmia r2!, {r0-r1} /* (r0,r1) <- (SRC location,fixup) */
and r1, r1, #0xff
cmp r1, #R_ARM_RELATIVE
bne fixnext
/* relative fix: increase location by offset */
add r0, r0, r4
ldr r1, [r0]
add r1, r1, r4
str r1, [r0]
fixnext:
cmp r2, r3
blo fixloop
relocate_done:
#ifdef __XSCALE__
/*
* On xscale, icache must be invalidated and write buffers drained,
* even with cache disabled - 4.2.7 of xscale core developer's manual
*/
mcr p15, 0, r0, c7, c7, 0 /* invalidate icache */
mcr p15, 0, r0, c7, c10, 4 /* drain write buffer */
#endif
/* ARMv4- don't know bx lr but the assembler fails to see that */
#ifdef __ARM_ARCH_4__
mov pc, lr
#else
bx lr
#endif
ENDPROC(relocate_code)
|
第2行,将__image_copy_start地址加载到r1寄存器当中。
第3行,带借位的减法指令subs,其中最后一个s表示将进位结果写入CPSR寄存器中。该指令的意思是r4 = r0 - r1,其中在调用relocate_code函数之前r0保存着gd->relocaddr的值,是一个偏移地址。
第4行,如果r0与r1后地址相等,则表示不用拷贝,直接跳过拷贝工作,否则需要重定位。
第5行,将__image_copy_end地址加载到r2寄存器,还记得我们前面讲的u-boot.lds链接脚本文件么?大家可以回过头对照一下。从__image_copy_start地址到__image_copy_end地址中间包含了代码段、数据段以及只读数据段,但是不包括动态链接rel_dyn部分。
第7~11行,比较源代码起始地址是否等于结束地址,如果相等则结束,不相等继续循环拷贝代码段、数据段以及只读数据段;每次从源代码地址中复制出8字节数据传入r10和r11寄存器,改变r1的地址,然后放到目标地址r0起始段中,改变r0的地址,之后比较源代码首地址与结束地址,当相等时,结束循环,完成代码段的拷贝。
第16~17行,分别将__rel_dyn_start与__rel_dyn_end地址加载到r2和r3寄存器中。
第18~25行,将__rel_dyn_start地址上连续8字节地址的值存在r0和r1中,接着判断r1中的值低8位数据,如果为23,则将r0中的值加重定位偏移值(relocation offset)。
第26~28行,加载r0地址中的数据到r1中,然后与偏移值(relocation offset)相加后放到r1中,最后再将相加后的数据放到以r0地址所在的空间中。如此周而复始,直到修改完整个__rel_dyn段后结束,完成重定位。
再重定位u-boot后又返回到arch/arm/lib/crt0.S文件中调用relocate_vectors函数,该函数我就不再一句一句 分析了,感兴趣的同学可以自己认真分析一遍,详细带着大家分析完这么多汇编代码后,对ARM启动流程也有一定的了解了。 套路都是一样一样的,重定位、重定位、重定位!重要的事情说三遍。relocate_vectors函数主要完成的工作就是实现 异常向量表的重定位,拷贝到正确的地址中去。
执行完relocate_vectors之后,继续回到_main函数中到用处,执行c_runtime_cpu_setup函数。 官方称c_runtime_cpu_setup为老一套,哈哈!还真是如此,又是关闭指令缓存I-cache。 c_runtime_cpu_setup函数如下所示:
1 2 3 4 5 6 7 8 9 10 11 | ENTRY(c_runtime_cpu_setup)
/*
* If I-cache is enabled invalidate it
*/
#ifndef CONFIG_SYS_ICACHE_OFF
mcr p15, 0, r0, c7, c5, 0 @ invalidate icache
mcr p15, 0, r0, c7, c10, 4 @ DSB
mcr p15, 0, r0, c7, c5, 4 @ ISB
#endif
bx lr
|
ENDPROC(c_runtime_cpu_setup)
大家对照前面讲的cpu_init_cp15函数自行分析,都是老套路了,一模一样,重定位后到了新的介质中运行也是要 设置一下运行环境。
接着回到spl_relocate_stack_gd函数,该函数主要作用是重新定位堆栈,以便执行后面的board_init_r函数, 为了提供更大的堆栈空间,但是我们并没有重定位堆栈。所以不用分析它。
紧接着分析一下u-boot是如何清除BSS段的,又是一个比较有趣的地方,不废话了,直接附上源代码:
1 2 3 4 5 6 7 8 9 | ldr r0, =__bss_start /* this is auto-relocated! */
#ifdef CONFIG_USE_ARCH_MEMSET /* jason mark--->configs/mx6ull_npi_defconfig have define */
ldr r3, =__bss_end /* this is auto-relocated! */
mov r1, #0x00000000 /* prepare zero to clear BSS */
subs r2, r3, r0 /* r2 = memset len */
bl memset
#else
|
第1行,加载BSS段的起始地址__bss_start到r0中。
第4行,加载BSS段的末尾地址__bss_end到r3中。
第7行,将BSS段的末尾地址减去BSS段的起始地址得到要清除的BSS段的大小。
第8行,调用memset函数清除BSS段,memset函数的使用大家都很熟悉了吧?,其中r0作为第一个参数、r1作为第二个参数、r2作为第三个参数。
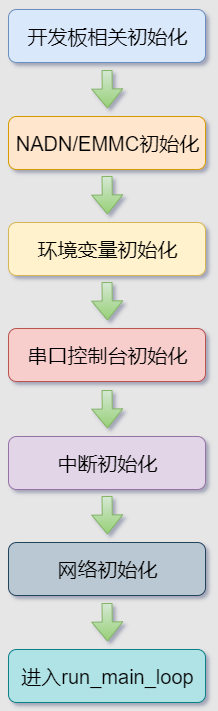
2.2. u-boot启动第二阶段源代码分析¶
第二阶段主要完成板级初始化、emmc初始化、控制台初始化、中断初始化及网络初始化等,流程图如下所示:
首先分析board_init_r函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 | void board_init_r(gd_t *new_gd, ulong dest_addr)
{
#if CONFIG_IS_ENABLED(X86_64)
arch_setup_gd(new_gd);
#endif
#ifdef CONFIG_NEEDS_MANUAL_RELOC
int i;
#endif
#if !defined(CONFIG_X86) && !defined(CONFIG_ARM) && !defined(CONFIG_ARM64)
gd = new_gd;
#endif
gd->flags &= ~GD_FLG_LOG_READY;
#ifdef CONFIG_NEEDS_MANUAL_RELOC
for (i = 0; i < ARRAY_SIZE(init_sequence_r); i++)
init_sequence_r[i] += gd->reloc_off;
#endif
if (initcall_run_list(init_sequence_r))
hang();
/* NOTREACHED - run_main_loop() does not return */
hang();
}
|
第14行,标记gd->flags,取消log就绪标志。
第21行,遍历且初始化函数指针数组init_sequence_r[]所指向的每一个函数。
然后我们大致分析一下函数指针数组init_sequence_r[]里的成员函数指针,首先全局预览一下该数组, 为了方便分析,我将不符合条件编译部分去除了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 | /*
* We hope to remove most of the driver-related init and do it if/when
* the driver is later used.
*
* TODO: perhaps reset the watchdog in the initcall function after each call?
*/
static init_fnc_t init_sequence_r[] = {
initr_trace, /* 初始化与跟踪调试相关部分 */
initr_reloc, /* 标记重定位完成 */
initr_caches, /* 使能cache */
initr_reloc_global_data, /* 初始化重定位后的gd成员 */
initr_barrier, /* imx6ull未用到 */
initr_malloc, /* 初始化malloc */
log_init, /* log初始化 */
initr_bootstage, /* Needs malloc() but has its own timer */
initr_console_record, /* 初始化控台 */
bootstage_relocate,
initr_dm, /* 设备模型初始化 */
board_init, /* 板级初始化 */
efi_memory_init, /* efi_memory初始化 */
stdio_init_tables, /* 标准输入输出及标准错误等初始化 */
initr_serial, /* 串口初始化 */
initr_announce, /* 跟调试相关 */
power_init_board, /* 电源芯片初始化 */
initr_nand, /* nandflash初始化 */
initr_mmc, /* mmc初始化 */
initr_env, /* 环境变量初始化 */
initr_secondary_cpu, /* 其他cpu初始化,由于imx6ull为单核cpu故忽略 */
stdio_add_devices, /* 输入输出设备初始化 */
initr_jumptable, /* 初始化跳转表 */
console_init_r, /* 控制台初始化 */
interrupt_init, /* 中断初始化 */
initr_enable_interrupts, /* 中断使能 */
/* PPC has a udelay(20) here dating from 2002. Why? */
initr_ethaddr, /* 网络初始化 */
board_late_init, /* 板子后续初始化 */
initr_fastboot_setup,
initr_net, /* 网络初始化 */
initr_check_fastboot,
run_main_loop, /* 运行主循环 */
};
|
预览完上面的函数指针数组后,应该的对本阶段做做的工作有了大致的了解,下面我们将详细分析函数指针数组中的成员。
initr_trace函数,由于我们并没有定义与调试相关的宏,所以这部分代码可以省略。
initr_reloc函数:
1 2 3 4 5 6 7 | static int initr_reloc(void)
{
/* tell others: relocation done */
gd->flags |= GD_FLG_RELOC | GD_FLG_FULL_MALLOC_INIT; /* 标记已经重定位成功,malloc初始化 */
return 0;
}
|
第4行,标记gd->flags,表示已经完成了重定位与malloc的初始化。
initr_reloc函数:
1 2 3 4 5 6 7 8 9 10 | /*
* Some of these functions are needed purely because the functions they
* call return void. If we change them to return 0, these stubs can go away.
*/
static int initr_caches(void)
{
/* Enable caches */
enable_caches();
return 0;
}
|
第8行,enable_caches函数,首先检查I-cache的使能状态,如果未使能I-cache则将其使能,接着使能D-cache。
initr_reloc_global_data函数(省略不符合条件编译部分):
1 2 3 4 5 6 7 8 9 10 | static int initr_reloc_global_data(void)
{
monitor_flash_len = (ulong)&__init_end - gd->relocaddr;
gd->env_addr += gd->reloc_off;
#ifdef CONFIG_EFI_LOADER
efi_runtime_relocate(gd->relocaddr, NULL);
#endif
return 0;
}
|
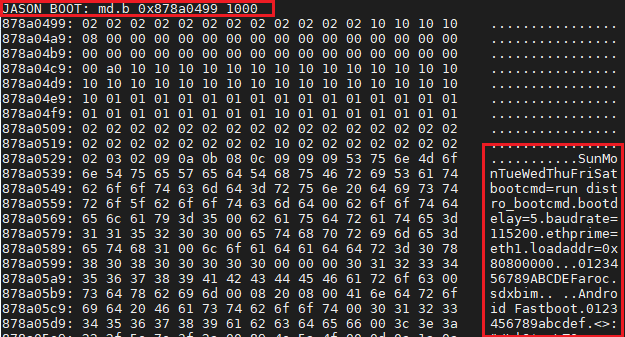
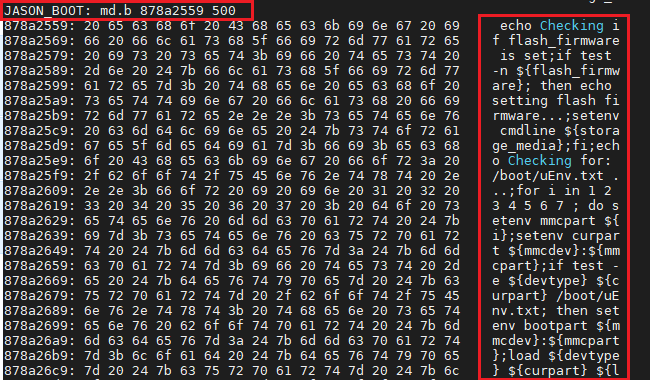
第3~4行,设置monitor_flash_len及gd成员env_addr=0x878a0499,重新定位早期的env_addr指针,我们打印一下定位后该地址存放的数据,看看是不是环境变量,如下图所示。
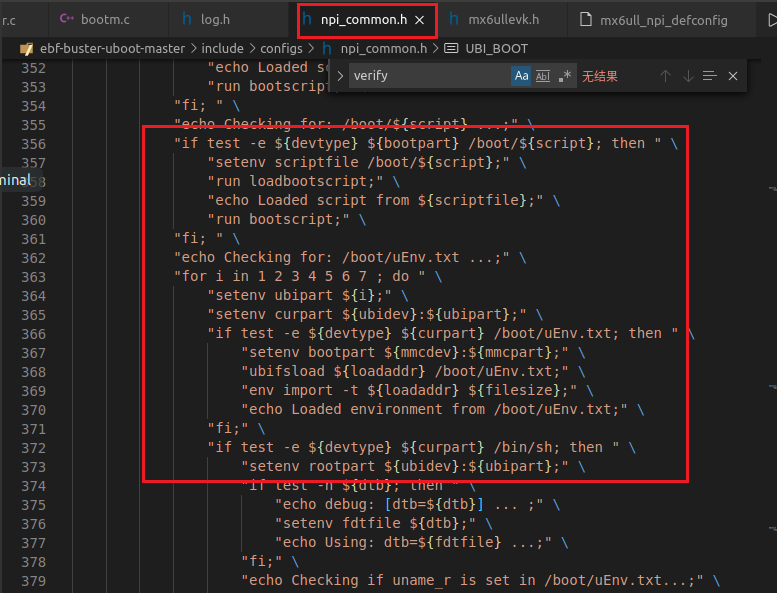
其实我们在fire-config中修改的也就是环境变量中/boot/uEnv.txt文件,通过配饰该文件可以选择是否加载对应的设备树,我们分别对照一下include/configs/npi_common.h中的UBI_BOOT环境变量 与存在env_addr所指向的内存地址处的环境变量,是一模一样的。
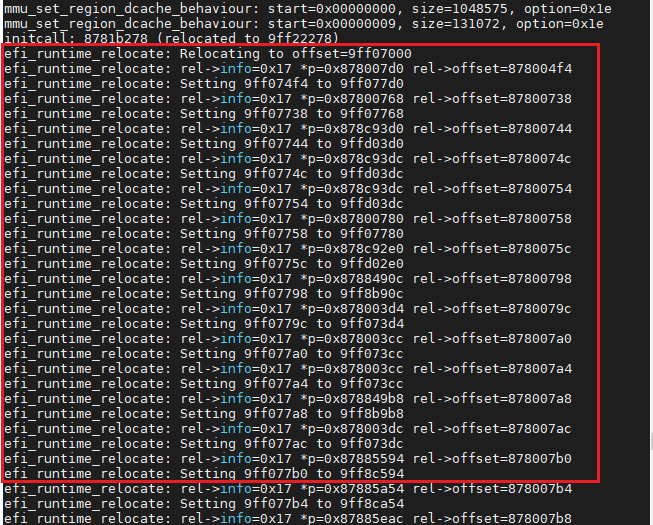
第6行,实现重定位,将EFI runtime重新定位到gd->relocaddr,重定位调试信息如下所示。
initr_barrier函数,由于我们没有配置CONFIG_PPC宏,故忽略。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | static int initr_malloc(void)
{
ulong malloc_start;
#if CONFIG_VAL(SYS_MALLOC_F_LEN)
debug("Pre-reloc malloc() used %#lx bytes (%ld KB)\n", gd->malloc_ptr,
gd->malloc_ptr / 1024);
#endif
/* The malloc area is immediately below the monitor copy in DRAM */
malloc_start = gd->relocaddr - TOTAL_MALLOC_LEN;
mem_malloc_init((ulong)map_sysmem(malloc_start, TOTAL_MALLOC_LEN),
TOTAL_MALLOC_LEN);
return 0;
}
|
第10~12行,分配malloc内存空间并将其初始化,malloc区域位域u-boot区的下方,我们来看下调试信息,看看这段代码的具体地址。

从上可以看出malloc区域位域0x9eef2000地址~0x9ff02000地址之间
log_init函数主要是分配log驱动空间,设置gd->flags中的log就绪标志,前面讲到过清除该标志,这里便置位log标志,并且设置log等级, 比如以哪个等级为界限,该等级之上的都可以被log,最后设置log的格式。
initr_bootstage函数标记引导阶段。
initr_console_record函数为空函数,忽略。
bootstage_relocate函数,这是完整的bootstage实现,重定位当前的bootstage记录。
initr_of_live函数为空函数,忽略。
initr_dm函数,此函数就比较重要了,也相对复杂,因为涉及到设备驱动模型,下面我们将细细道来。 驱动模型关键:
驱动模型绑定->ofdata_to_platdata(可选)->probe
initr_dm函数如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 | #ifdef CONFIG_DM
static int initr_dm(void)
{
int ret;
/* Save the pre-reloc driver model and start a new one */
gd->dm_root_f = gd->dm_root;
gd->dm_root = NULL;
#ifdef CONFIG_TIMER
gd->timer = NULL;
#endif
bootstage_start(BOOTSTATE_ID_ACCUM_DM_R, "dm_r");
ret = dm_init_and_scan(false);
bootstage_accum(BOOTSTATE_ID_ACCUM_DM_R);
if (ret)
return ret;
#ifdef CONFIG_TIMER_EARLY
ret = dm_timer_init();
if (ret)
return ret;
#endif
return 0;
}
#endif
|
第7行,首先保存以前分配的驱动模型(DM),并且开始设置一个新的驱动模型。
第13行,初始化并扫描驱动模型。
我们总体看下它的函数调用顺序。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | initr_dm() //初始化一个树形的驱动模型结构
dm_init_and_scan() //初始化根节点的设备,同时绑定根节点下的全部子节点
dm_init //绑定根节点到gd->dm_root中,并初始化根节点下的设备
device_bind_by_name //根据名字绑定,查找和设备信息匹配的driver,然后创建对应的udevice和uclass并进行绑定,最后放在DM_ROOT_NON_CONST中
device_probe //对根设备执行probe操作,
dm_scan_platdata //绑定子节点
lists_bind_drivers //绑定驱动链表
dm_extended_scan_fdt //在其他地方(设备树)搜索设备并进行驱动匹配,然后绑定
dm_scan_fdt //扫描设备树并绑定节点的驱动
dm_scan_fdt_node //绑定设备的入口,在该函数中会确定设备是否具有相关属性,如果没有则不会绑定
lists_bind_fdt //搜索可以匹配到该设备的驱动
device_bind_with_driver_data //匹配到了驱动器就会信息绑定
device_bind_common //将设备节点和父节点建立树形结构
uclass_bind_device //将该设备挂在相应的dev->uclass_node链表上
drv->bind(dev) 将设备绑定到对应的驱动
parent->driver->child_post_bind(dev) //父节点驱动的child_post_bind接口函数
uc->uc_drv->post_bind(dev) //在新设备绑定到此uclass后调用,设备节点在此接口下在soc下进行展开
dm_scan_fdt_ofnode_path //扫描"/clocks"节点
dm_scan_fdt_node //在该函数中会确定设备是否具有clocks相关属性,如果没有则不会绑定
dm_scan_fdt_ofnode_path //扫描"/firmware"节点
dm_scan_fdt_node //在该函数中会确定设备是否具有firmware相关属性,如果没有则不会绑定
dm_scan_other //扫描其他设备
|
完成以上函数的执行后,在内存中也就形成了一个至少深度为2的树形结构(假设有子节点),其中gd->dm_root 保存着根节点的信息。
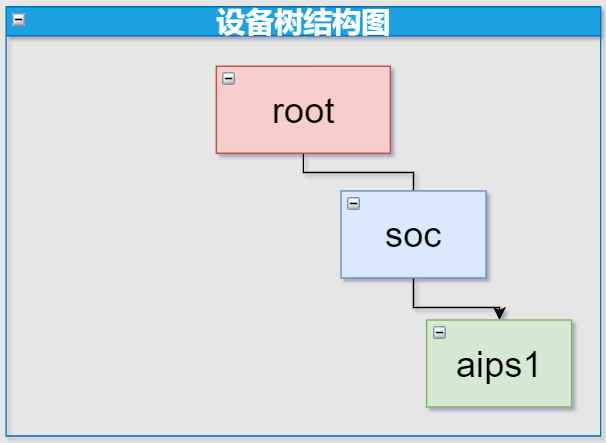
以上函数完成了绑定,接下来就是probe了,接着我们看下imx6ull EVK pro开发板对应的设备树信息,由于设备树比较庞大, 我这里提取出部分信息,如下图所示
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 | / {
soc {
aips1: aips-bus@02000000 {
spba-bus@02000000 {
compatible = "fsl,spba-bus", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x02000000 0x40000>;
ranges;
uart1: serial@02020000 {
compatible = "fsl,imx6ul-uart",
"fsl,imx6q-uart", "fsl,imx21-uart";
reg = <0x02020000 0x4000>;
interrupts = <GIC_SPI 26 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_UART1_IPG>,
<&clks IMX6UL_CLK_UART1_SERIAL>;
clock-names = "ipg", "per";
status = "disabled";
};
uart7: serial@02018000 {
compatible = "fsl,imx6ul-uart",
"fsl,imx6q-uart", "fsl,imx21-uart";
reg = <0x02018000 0x4000>;
interrupts = <GIC_SPI 39 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_UART7_IPG>,
<&clks IMX6UL_CLK_UART7_SERIAL>;
clock-names = "ipg", "per";
dmas = <&sdma 43 4 0>, <&sdma 44 4 0>;
dma-names = "rx", "tx";
status = "disabled";
};
}
tsc: tsc@02040000 {
compatible = "fsl,imx6ul-tsc";
reg = <0x02040000 0x4000>, <0x0219c000 0x4000>;
interrupts = <GIC_SPI 3 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 101 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_IPG>,
<&clks IMX6UL_CLK_ADC2>;
clock-names = "tsc", "adc";
status = "disabled";
};
}
}
}
|
可以归纳出其一级子节点树形结构如下图所示:
接着我们简单描述一下pribe的流程,函数的调用顺寻如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | dm_init
device_probe(dev)
device_probe(dev) //递归probe parent节点
uclass_resolve_seq(dev) //分配一个seq给此设备
uclass_find_device_by_seq //根据ID和顺序查找uclass设备
uclass_get //根据ID获取uclass,如果需要的话创建它
dev->flags |= DM_FLAG_ACTIVATED; //设置dev->flags,表示该设备已经被激活
pinctrl_select_state(dev, "default"); //初始化相关引脚
uclass_pre_probe_device //处理probe后的设备
dev->parent->driver->child_pre_probe(dev) //执行父节点驱动的child_pre_probe接口函数
drv->ofdata_to_platdata(dev) //执行设备驱动的ofdata_to_platdata接口函数
clk_set_defaults(dev) //设置默认时钟
drv->probe(dev) //配置驱动中的probe接口
uclass_post_probe_device(dev) //调用所属class驱动的post_probe接口函数
|
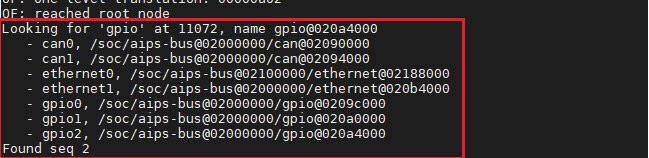
我们可以发现device_probe时都会先调用一下drv->ofdata_to_platdata(dev), 之后才会去执行probe接口函数,我们可以看下drivers/core/uclass.c文件中 uclass_find_device_by_seq函数的调试信息,其实u-boot是建立了一个哈希表来存放设备树的, 下面是搜索遍历根节点设备的信息,当你打开debug后便会发现,串口控制台打印的很大一部分信息都是搜索设备树的信息。
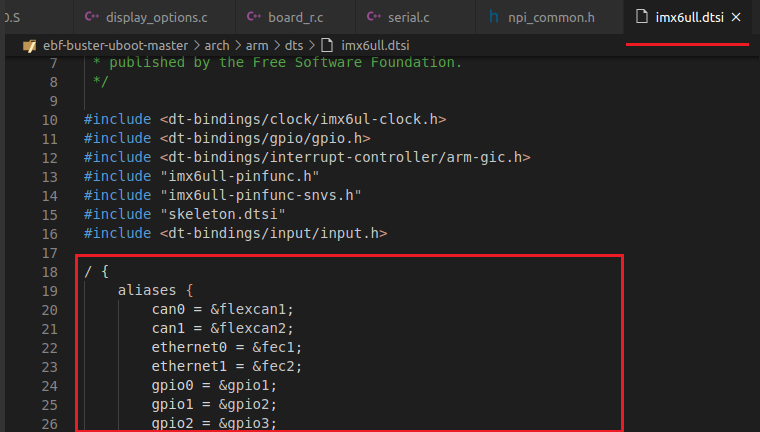
紧接着看下我们的设备树文件imx6ull.dtsi看看是不是一模一样的,^-^。
由于要深入理解设备模型比较复杂,我们只要熟悉一下它的工作流程即可。
board_init函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | int board_init(void)
{
/* Address of boot parameters */
gd->bd->bi_boot_params = PHYS_SDRAM + 0x100;
#ifdef CONFIG_FEC_MXC
setup_fec(CONFIG_FEC_ENET_DEV);
#endif
#ifdef CONFIG_FSL_QSPI
board_qspi_init();
#endif
#ifdef CONFIG_NAND_MXS
setup_gpmi_nand();
#endif
return 0;
}
|
第4行,此函数只有该行被执行,意思是设置启动参数的地址,其中PHYS_SDRAM被定义为0x10000000,因此gd->bd->bi_boot_params = 0x10000000 + 0x100 = 0x10000100。
stdio_init_tables函数,因为该函数没有被配置相关的宏,所以没有做什么工作,忽略。
initr_serial函数:该函数完成串口相关初始化,该函数还是有很多东西值得挖掘的,代码如下。
1 2 3 4 5 | static int initr_serial(void)
{
serial_initialize();
return 0;
}
|
这里我们并没有看到什么复杂操作,我们到进入serial_initialize函数里面看看。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | /**
* serial_initialize() - Register all compiled-in serial port drivers
*
* This function registers all serial port drivers that are compiled
* into the U-Boot binary with the serial core, thus making them
* available to U-Boot to use. Lastly, this function assigns a default
* serial port to the serial core. That serial port is then used as a
* default output.
*/
void serial_initialize(void)
{
atmel_serial_initialize();
mcf_serial_initialize();
mpc85xx_serial_initialize();
mxc_serial_initialize();
ns16550_serial_initialize();
pl01x_serial_initialize();
pxa_serial_initialize();
sh_serial_initialize();
serial_assign(default_serial_console()->name);
}
|
第12~19行,这些函数并没有初始化实际的硬件,他们单纯的向u-boot注册一下struct serial_device类型的串口设备。
第21行,serial_assign函数查找当前所使用的串口设备,同时把对应的结构体地址传给指向当前使用的串口设备指针serial_current。其遍历serial_devices,并根据设备名字匹配串口。
initr_announce函数,该函数只有一行debug打印调试信息的代码,表示RAM正在运行,且u-boot已经完成了重定位,调试信息如下图所示:

power_init_board函数,此函数为空函数,忽略。
initr_nand函数:
1 2 3 4 5 6 7 8 9 10 | #ifdef CONFIG_CMD_NAND
/* go init the NAND */
static int initr_nand(void)
{
puts("NAND: ");
nand_init();
printf("%lu MiB\n", nand_size() / 1024);
return 0;
}
#endif
|
第5行,打印”NAND: “信息到串口控制台,表示要初始化nand了,这是对于nand版本6u而言的,由于我目前使用的是emmc,故此函数什么也没做。
initr_mmc函数:
1 2 3 4 5 6 | static int initr_mmc(void)
{
puts("MMC: ");
mmc_initialize(gd->bd);
return 0;
}
|
我们将第4行mmc_initialize函数展开分析一下。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | int mmc_initialize(bd_t *bis)
{
static int initialized = 0;
int ret;
if (initialized) /* Avoid initializing mmc multiple times */
return 0;
initialized = 1;
#if !CONFIG_IS_ENABLED(BLK)
#if !CONFIG_IS_ENABLED(MMC_TINY)
mmc_list_init();
#endif
#endif
ret = mmc_probe(bis);
if (ret)
return ret;
#ifndef CONFIG_SPL_BUILD
print_mmc_devices(',');
#endif
mmc_do_preinit();
return 0;
}
|
第5~7行,为了避免重复初始化emmc,所以设置了一个initialized标志位,只初始化一次emmc。
第14行,初始化emmc。
initr_env函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 | static int initr_env(void)
{
char *p;
/* initialize environment */
if (should_load_env())
env_relocate();
else
set_default_env(NULL, 0);
#ifdef CONFIG_OF_CONTROL
env_set_hex("fdtcontroladdr",
(unsigned long)map_to_sysmem(gd->fdt_blob));
#endif
if(1 == check_mmc_num())
{
env_set("storage_media","init=/opt/scripts/tools/Nand/init-Nand-flasher-v1.sh");
p = env_get("storage_media");
printf("WARNING:%s\n",p);
}
else
{
env_set("storage_media","init=/opt/scripts/tools/eMMC/init-eMMC-flasher-v3.sh");
p = env_get("storage_media");
printf("WARNING:%s\n",p);
}
/* Initialize from environment */
load_addr = env_get_ulong("loadaddr", 16, load_addr);
printf("$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$WARNING:%X\n",load_addr); //为方便调试添加,查看加载地址
return 0;
}
|
第6~9行,检查早期在u-boot中的环境变量是否OK,和FDT核对一下,默认它是OK的,如果早期的环境变量OK就则找到且加载环境变量,否则使用默认的环境变量。
我没进入env_relocate函数看看,到底发送了什么。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | void env_relocate(void)
{
#if defined(CONFIG_NEEDS_MANUAL_RELOC)
env_reloc();
env_fix_drivers();
env_htab.change_ok += gd->reloc_off;
#endif
if (gd->env_valid == ENV_INVALID) {
#if defined(CONFIG_ENV_IS_NOWHERE) || defined(CONFIG_SPL_BUILD)
/* Environment not changable */
set_default_env(NULL, 0);
#else
bootstage_error(BOOTSTAGE_ID_NET_CHECKSUM);
set_default_env("bad CRC", 0);
#endif
} else {
env_load();
}
}
|
我们看第8行,大家可以回归头去看看我们前面化的global_data表格,其中gd->env_valid是等于1,即等于ENV_VALID的,如果等于0就会使用默认的环境变量,所以我们直接 分析env_load()函数了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 | int env_load(void)
{
struct env_driver *drv;
int best_prio = -1;
int prio;
for (prio = 0; (drv = env_driver_lookup(ENVOP_LOAD, prio)); prio++) {
int ret;
if (!drv->load)
continue;
if (!env_has_inited(drv->location))
continue;
printf("#################################################################################\r\n");
printf("Loading Environment from %s... ", drv->name);
printf("#################################################################################\r\n");
/*
* In error case, the error message must be printed during
* drv->load() in some underlying API, and it must be exactly
* one message.
*/
ret = drv->load();
if (!ret) {
printf("OK\n");
return 0;
} else if (ret == -ENOMSG) {
/* Handle "bad CRC" case */
if (best_prio == -1){
best_prio = prio;
printf("%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %d\n", best_prio);
}
} else {
debug("Failed (%d)\n", ret);
}
}
/*
* In case of invalid environment, we set the 'default' env location
* to the best choice, i.e.:
* 1. Environment location with bad CRC, if such location was found
* 2. Otherwise use the location with highest priority
*
* This way, next calls to env_save() will restore the environment
* at the right place.
*/
if (best_prio >= 0)
debug("Selecting environment with bad CRC\n");
else
best_prio = 0;
env_get_location(ENVOP_LOAD, best_prio);
return -ENODEV;
}
|
首先看到第7行中的env_driver_lookup函数,它负责找到最适合的环境位置,成功后返回一个指向env_driver的指针, env_driver包含了存储设备的名字、从存储器加载环境的方法、保存环境到存储设备的方法以及设置初始的预搬迁环境的方法; 第13行查看环境是否已经初始化过了;第16~18行,其中16与18行是我为了方便调试添加的;第24行,加载环境变量,如果加载成功则打印“OK”, 环境变量中没有消息则打印32行数据,此行是我添加的,实际上会打印出第32行字符串。CRC校验失败,最后会使用自己设置的环境变量,我们再返回到initr_env函数 ,对照第14行,由于我们使用的是emmc所以check_mmc_num()返回值是2,及打印第22行对应的”init=/opt/scripts/tools/eMMC/init-eMMC-flasher-v3.sh”环境变量信息。 如下图所示:
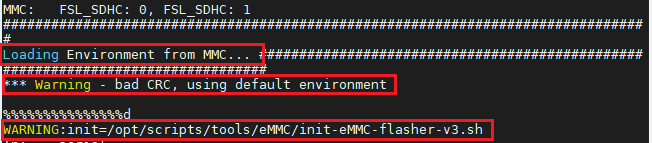
然后我们进入u-boot的命令行模式,打印一下“storage_media”这个环境变量看看是不是和我们预想的一样!

在这里我们要说一下,当其运行ret = drv->load(),它调用blk_find_device函数遍历加载环境变量时,为了方便管理环境变量,首先会创建一个哈希表,哈希表是基于哈希函数建立的一种查找表,然后将 环境变量都依次填到哈希表中,调试信息如下所示。
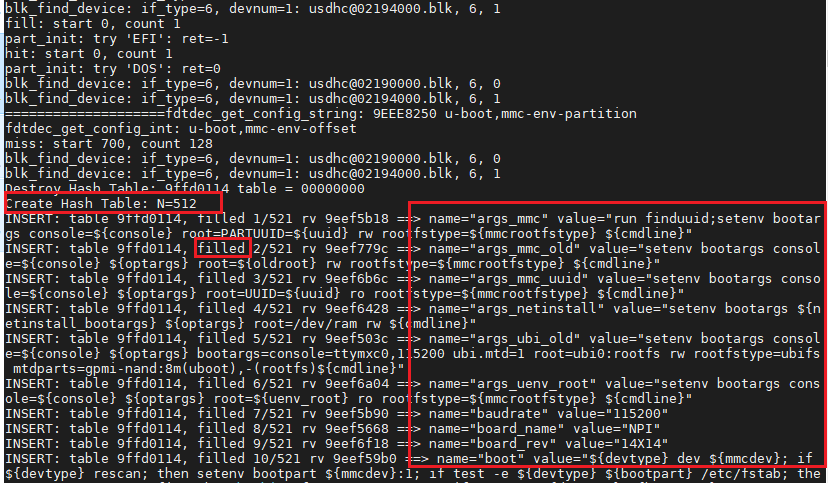
知识集锦【数据结构之什么是哈希表?】:
哈希表就是一种以键值对存储数据的结构。
哈希表是一个在空间和时间上做出权衡的经典例子。如果没有内存限制,那么可以直接将键作为数组的索引。那么所查找的时间复杂度为O(1);如果没有时间限制,那么我们可以使用无序数组并进行顺序查找,这样只需要很少的内存。哈希表使用了适度的时间和空间来在这两个极端之间找到了平衡。只需要调整哈希函数算法即可在时间和空间上做出取舍。
initr_env函数中第28行,由于写的太长了,需要回到initr_env函数继续分析。该行中调用env_get_ulong函数得到环境变量中”loadaddr”的值,也就是加载地址0x80800000,地址打印如下所示。

initr_secondary_cpu函数:对于imx6ull而言,它是单核cpu,所以此函数是个空函数,什么也没做,忽略。
stdio_add_devices函数:添加标准输入输出设备。
initr_jumptable函数:该函数调用了jumptable_init函数以初始化跳转表,为跳转表分配内存空间,它是基于动态分配的内存空间。
console_init_r函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 | /* Called after the relocation - use desired console functions */
int console_init_r(void)
{
char *stdinname, *stdoutname, *stderrname;
struct stdio_dev *inputdev = NULL, *outputdev = NULL, *errdev = NULL;
#ifdef CONFIG_SYS_CONSOLE_ENV_OVERWRITE
int i;
#endif /* CONFIG_SYS_CONSOLE_ENV_OVERWRITE */
#if CONFIG_IS_ENABLED(CONSOLE_MUX)
int iomux_err = 0;
#endif
/* set default handlers at first */
gd->jt->getc = serial_getc;
gd->jt->tstc = serial_tstc;
gd->jt->putc = serial_putc;
gd->jt->puts = serial_puts;
gd->jt->printf = serial_printf;
/* stdin stdout and stderr are in environment */
/* scan for it */
stdinname = env_get("stdin");
stdoutname = env_get("stdout");
stderrname = env_get("stderr");
if (OVERWRITE_CONSOLE == 0) { /* if not overwritten by config switch */
inputdev = search_device(DEV_FLAGS_INPUT, stdinname);
outputdev = search_device(DEV_FLAGS_OUTPUT, stdoutname);
errdev = search_device(DEV_FLAGS_OUTPUT, stderrname);
#if CONFIG_IS_ENABLED(CONSOLE_MUX)
iomux_err = iomux_doenv(stdin, stdinname);
iomux_err += iomux_doenv(stdout, stdoutname);
iomux_err += iomux_doenv(stderr, stderrname);
if (!iomux_err)
/* Successful, so skip all the code below. */
goto done;
#endif
}
/* if the devices are overwritten or not found, use default device */
if (inputdev == NULL) {
inputdev = search_device(DEV_FLAGS_INPUT, "serial");
}
if (outputdev == NULL) {
outputdev = search_device(DEV_FLAGS_OUTPUT, "serial");
}
if (errdev == NULL) {
errdev = search_device(DEV_FLAGS_OUTPUT, "serial");
}
/* Initializes output console first */
if (outputdev != NULL) {
/* need to set a console if not done above. */
console_doenv(stdout, outputdev);
}
if (errdev != NULL) {
/* need to set a console if not done above. */
console_doenv(stderr, errdev);
}
if (inputdev != NULL) {
/* need to set a console if not done above. */
console_doenv(stdin, inputdev);
}
#if CONFIG_IS_ENABLED(CONSOLE_MUX)
done:
#endif
#ifndef CONFIG_SYS_CONSOLE_INFO_QUIET
stdio_print_current_devices();//58
#endif /* CONFIG_SYS_CONSOLE_INFO_QUIET */
#ifdef CONFIG_VIDCONSOLE_AS_LCD
if (strstr(stdoutname, "lcd"))
printf("Warning: Please change 'lcd' to 'vidconsole' in stdout/stderr environment vars\n");
#endif
#ifdef CONFIG_SYS_CONSOLE_ENV_OVERWRITE
/* set the environment variables (will overwrite previous env settings) */
for (i = 0; i < MAX_FILES; i++) {
env_set(stdio_names[i], stdio_devices[i]->name);
}
#endif /* CONFIG_SYS_CONSOLE_ENV_OVERWRITE */
gd->flags |= GD_FLG_DEVINIT; /* device initialization completed */
#if 0
/* If nothing usable installed, use only the initial console */
if ((stdio_devices[stdin] == NULL) && (stdio_devices[stdout] == NULL))
return 0;
#endif
print_pre_console_buffer(PRE_CONSOLE_FLUSHPOINT2_EVERYTHING_BUT_SERIAL);
return 0;
}
|
第14~18行,设置默认的控制台处理函数,都为串口。
第22~24行,从环境变量中扫描分别得到”stdin”、”stdout”及”stderr”(标准输入、标准输出及标准错误)对应的设备名字。
第27~29行,由于我们定义OVERWRITE_CONSOLE=0,因为没有配置控制台的设备,故执行这段代码,通过标准输入、输出、错误名字搜索其对应的设备。
第30~38行,如果没有搜索到设备,则搜索使用默认的串口设备”serial”,后面设置串口的引脚复用功能。
第58行,打印当前的标准输入、输出、错误对应的设备名字。
我们将stdio_print_current_devices函数展开如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | void stdio_print_current_devices(void)
{
/* Print information */
puts("In: ");
if (stdio_devices[stdin] == NULL) {
puts("No input devices available!\n");
} else {
printf ("%s\n", stdio_devices[stdin]->name);
}
puts("Out: ");
if (stdio_devices[stdout] == NULL) {
puts("No output devices available!\n");
} else {
printf ("%s\n", stdio_devices[stdout]->name);
}
puts("Err: ");
if (stdio_devices[stderr] == NULL) {
puts("No error devices available!\n");
} else {
printf ("%s\n", stdio_devices[stderr]->name);
}
}
|
这个函数分别打印出标准输入、标准输出、标准错误对应的设备,大家看下面的图片就一目了然了。

第68行,设置环境变量”stdout=xxx”、”stderr=xxx”、”stdin=xxx”。
第72行,设置gd->flags中的GD_FLG_DEVINIT标志位,表示控制台设备已经初始化完成了。
interrupt_init函数:中断初始化,为中断设置栈。
initr_enable_interrupts函数:使能中断异常。
initr_ethaddr函数:从环境变量中获得并初始化网络地址,即从环境变量中找到ethaddr的值,并将其存到gd->bd->bi_enetaddr。
board_late_init函数:主要是复位看门狗。
initr_net函数:初始化网卡。
1 2 3 4 5 6 7 8 9 10 | static int initr_net(void)
{
puts("Net: ");
eth_initialize();
#if defined(CONFIG_RESET_PHY_R)
debug("Reset Ethernet PHY\n");
reset_phy();
#endif
return 0;
}
|
第3行,打印网络初始化就绪信息。
第4行,调用eth_initialize函数初始化网络相关,如MAC地址,将其展开如下。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 | int eth_initialize(void)
{
int num_devices = 0;
struct udevice *dev;
eth_common_init();
/*
* Devices need to write the hwaddr even if not started so that Linux
* will have access to the hwaddr that u-boot stored for the device.
* This is accomplished by attempting to probe each device and calling
* their write_hwaddr() operation.
*/
uclass_first_device_check(UCLASS_ETH, &dev);
if (!dev) {
printf("No ethernet found.\n");
bootstage_error(BOOTSTAGE_ID_NET_ETH_START);
} else {
char *ethprime = env_get("ethprime");
struct udevice *prime_dev = NULL;
if (ethprime)
prime_dev = eth_get_dev_by_name(ethprime);
if (prime_dev) {
eth_set_dev(prime_dev);
eth_current_changed();
} else {
eth_set_dev(NULL);
}
bootstage_mark(BOOTSTAGE_ID_NET_ETH_INIT);
do {
if (num_devices)
printf(", ");
printf("eth%d: %s", dev->seq, dev->name);
if (ethprime && dev == prime_dev)
printf(" [PRIME]");
eth_write_hwaddr(dev);
uclass_next_device_check(&dev);
num_devices++;
} while (dev);
putc('\n');
}
return num_devices;
}
|
第32~45行,遍历所有网络设备。
第41行,设置相关环境变量及mac地址。
run_main_loop函数,终于到run_main_loop函数了:
1 2 3 4 5 6 7 8 9 10 | static int run_main_loop(void)
{
#ifdef CONFIG_SANDBOX
sandbox_main_loop_init();
#endif
/* main_loop() can return to retry autoboot, if so just run it again */
for (;;)
main_loop();
return 0;
}
|
一看就有个死循环,如果启动不成功,可能会因此死循环而不断重新启动,进入main_loop函数看下。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 | /* We come here after U-Boot is initialised and ready to process commands */
void main_loop(void)
{
const char *s;
bootstage_mark_name(BOOTSTAGE_ID_MAIN_LOOP, "main_loop");
if (IS_ENABLED(CONFIG_VERSION_VARIABLE))
env_set("ver", version_string); /* set version variable */
cli_init();
run_preboot_environment_command();
if (IS_ENABLED(CONFIG_UPDATE_TFTP))
update_tftp(0UL, NULL, NULL);
s = bootdelay_process();
if (cli_process_fdt(&s))
cli_secure_boot_cmd(s);
autoboot_command(s);
cli_loop();
panic("No CLI available");
}
|
第18行,处理延时参数,此函数为空函数,忽略。
第22行,若启动延时结束前,用户输入任意按键打断启动过程,则返回,否则启动。
第24行,读取用户输入的命令并执行之,
第25行,cli_loop返回,执行此处表明用户再bootdelay这段时间都没有任何输入,因此打印提示信息,表示没有获得命令。
我们下面分别分析一下bootdelay_process函数与autoboot_command函数。
首先分析bootdelay_process函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 | const char *bootdelay_process(void)
{
char *s;
int bootdelay;
bootcount_inc();
s = env_get("bootdelay");
bootdelay = s ? (int)simple_strtol(s, NULL, 10) : CONFIG_BOOTDELAY;
#if defined(is_boot_from_usb)
if (is_boot_from_usb() && env_get("bootcmd_mfg")) {
disconnect_from_pc();
printf("Boot from USB for mfgtools\n");
bootdelay = 0;
set_default_env("Use default environment for \
mfgtools\n", 0);
} else if (is_boot_from_usb()) {
printf("Boot from USB for uuu\n");
env_set("bootcmd", "fastboot 0");
} else {
printf("Normal Boot\n");
}
#endif
#ifdef CONFIG_OF_CONTROL
bootdelay = fdtdec_get_config_int(gd->fdt_blob, "bootdelay",
bootdelay);
#endif
debug("### main_loop entered: bootdelay=%d\n\n", bootdelay);
#if defined(CONFIG_MENU_SHOW)
bootdelay = menu_show(bootdelay);
#endif
bootretry_init_cmd_timeout();
#ifdef CONFIG_POST
if (gd->flags & GD_FLG_POSTFAIL) {
s = env_get("failbootcmd");
} else
#endif /* CONFIG_POST */
if (bootcount_error())
s = env_get("altbootcmd");
else
s = env_get("bootcmd");
#if defined(is_boot_from_usb)
if (is_boot_from_usb() && env_get("bootcmd_mfg")) {
s = env_get("bootcmd_mfg");
printf("Run bootcmd_mfg: %s\n", s);
}
#endif
process_fdt_options(gd->fdt_blob);
stored_bootdelay = bootdelay;
return s;
}
|
第6行,该函数为空函数,忽略。
第8行,再环境变量中搜索bootdelay这个环境变量(字符串形式),如果有配置该环境变量则会将字符串转换成长整型数值,否则选择CONFIG_BOOTDELAY作为配置值。
3, 第46行,从环境变量中获取bootcmd。
接着分析autoboot_command函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | void autoboot_command(const char *s)
{
debug("### main_loop: bootcmd=\"%s\"\n", s ? s : "<UNDEFINED>");
if (stored_bootdelay != -1 && s && !abortboot(stored_bootdelay)) {
#if defined(CONFIG_AUTOBOOT_KEYED) && !defined(CONFIG_AUTOBOOT_KEYED_CTRLC) //不执行
int prev = disable_ctrlc(1); /* disable Control C checking */
#endif
run_command_list(s, -1, 0);
#if defined(CONFIG_AUTOBOOT_KEYED) && !defined(CONFIG_AUTOBOOT_KEYED_CTRLC) //不执行
disable_ctrlc(prev); /* restore Control C checking */
#endif
}
#ifdef CONFIG_MENUKEY //未定义不执行
if (menukey == CONFIG_MENUKEY) {
s = env_get("menucmd");
if (s)
run_command_list(s, -1, 0);
}
#endif /* CONFIG_MENUKEY */
}
|
第3行,打印bootcmd环境变量信息。
第5行,若stored_bootdelay != -1,且bootcmd有值,同时在启动过程中没有检测到任何打断启动过程的输入,则运行启动命令列表run_command_list中的一系列命令,即默认的bootcmd命令,其中stored_bootdelay会在abortboot函数主每过一秒钟减1。
然后我们来看下debug的调试信息,其显示了bootdelay和bootcmd的值。
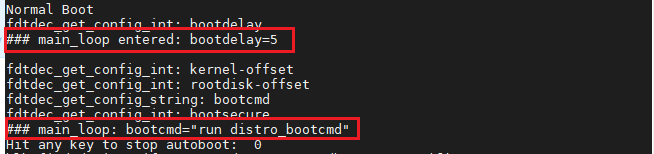
其中”run distro_bootcmd”这条命令是U-Boot中设计的一种启动机制,用来自适应各种不同的启动媒介,并从中找到可用的启动镜像然后启动。
cli_loop函数:
1 2 3 4 5 6 7 8 9 10 11 12 | void cli_loop(void)
{
#ifdef CONFIG_HUSH_PARSER
parse_file_outer();
/* This point is never reached */
for (;;);
#elif defined(CONFIG_CMDLINE)
cli_simple_loop();
#else
printf("## U-Boot command line is disabled. Please enable CONFIG_CMDLINE\n");
#endif /*CONFIG_HUSH_PARSER*/
}
|
第4行,一般情况下该函数只有第4行执行,如果我们在启动倒计时bootdelay减为0之前按下了按键打断其自启动过程,就会进入cli_loop函数,此函数负责不断循环检测并处理用户输入的命令。
接着我们将parse_file_outer函数展开,如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 | int parse_file_outer(void)
#endif
{
int rcode;
struct in_str input;
#ifndef __U_BOOT__ //未定义
setup_file_in_str(&input, f);
#else
setup_file_in_str(&input);
#endif
rcode = parse_stream_outer(&input, FLAG_PARSE_SEMICOLON);
return rcode;
}
|
第9行,执行setup_file_in_str函数完成结构体input的初始化。
第11行,函数parse_stream_outer循环的主体,即do-while循环体,它完成用户输入命令的解析及执行。
我们详细看下parse_stream_outer函数的执行流程:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 | static int parse_stream_outer(struct in_str *inp, int flag)
{
struct p_context ctx;
o_string temp=NULL_O_STRING;
int rcode;
#ifdef __U_BOOT__
int code = 1;
#endif
do {
ctx.type = flag;
initialize_context(&ctx);
update_ifs_map();
if (!(flag & FLAG_PARSE_SEMICOLON) || (flag & FLAG_REPARSING)) mapset((uchar *)";$&|", 0);
inp->promptmode=1;
rcode = parse_stream(&temp, &ctx, inp,
flag & FLAG_CONT_ON_NEWLINE ? -1 : '\n');
#ifdef __U_BOOT__
if (rcode == 1) flag_repeat = 0;
#endif
if (rcode != 1 && ctx.old_flag != 0) {
syntax();
#ifdef __U_BOOT__
flag_repeat = 0;
#endif
}
if (rcode != 1 && ctx.old_flag == 0) {
done_word(&temp, &ctx);
done_pipe(&ctx,PIPE_SEQ);
#ifndef __U_BOOT__
run_list(ctx.list_head);
#else
code = run_list(ctx.list_head);
if (code == -2) { /* exit */
b_free(&temp);
code = 0;
/* XXX hackish way to not allow exit from main loop */
if (inp->peek == file_peek) {
printf("exit not allowed from main input shell.\n");
continue;
}
break;
}
if (code == -1)
flag_repeat = 0;
#endif
} else {
if (ctx.old_flag != 0) {
free(ctx.stack);
b_reset(&temp);
}
#ifdef __U_BOOT__
if (inp->__promptme == 0) printf("<INTERRUPT>\n");
inp->__promptme = 1;
#endif
temp.nonnull = 0;
temp.quote = 0;
inp->p = NULL;
free_pipe_list(ctx.list_head,0);
}
b_free(&temp);
/* loop on syntax errors, return on EOF */
} while (rcode != -1 && !(flag & FLAG_EXIT_FROM_LOOP) &&
(inp->peek != static_peek || b_peek(inp)));
#ifndef __U_BOOT__
return 0;
#else
return (code != 0) ? 1 : 0;
#endif /* __U_BOOT__ */
}
|
第10行,典型的do-While循环开始。
第16行,读取用户输入的命令,并解析,
第33行,执行用户输入的命令,我们进去看下。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 | /* Select which version we will use */
static int run_list(struct pipe *pi)
{
int rcode=0;
#ifndef __U_BOOT__
if (fake_mode==0) {
#endif
rcode = run_list_real(pi);
#ifndef __U_BOOT__
}
#endif
/* free_pipe_list has the side effect of clearing memory
* In the long run that function can be merged with run_list_real,
* but doing that now would hobble the debugging effort. */
free_pipe_list(pi,0);
return rcode;
}
|
调用run_list_real函数,将收到的指令通过一系列处理加入一个执行列表,然后执行这个列表,带有很多控制与处理方式,最后 调用cmd_process函数。
分析cmd_process函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 | enum command_ret_t cmd_process(int flag, int argc, char * const argv[],
int *repeatable, ulong *ticks)
{
enum command_ret_t rc = CMD_RET_SUCCESS;
cmd_tbl_t *cmdtp;
#if defined(HUSH_CMDLINE_DBG)
{
int i;
printf(" +-+");
for (i = 0; i < argc; i++) {
printf("%s ", argv[i]);
}
printf("-+-\n");
}
#endif
/* Look up command in command table */
cmdtp = find_cmd(argv[0]);
if (cmdtp == NULL) {
printf("Unknown command '%s' - try 'help'\n", argv[0]);
printf("你敲的命令 '%s' 俺不认得喔! - try 'help'\n", argv[0]);
return 1;
}
/* found - check max args */
if (argc > cmdtp->maxargs)
rc = CMD_RET_USAGE;
#if defined(CONFIG_CMD_BOOTD)
/* avoid "bootd" recursion */
else if (cmdtp->cmd == do_bootd) {
if (flag & CMD_FLAG_BOOTD) {
puts("'bootd' recursion detected\n");
rc = CMD_RET_FAILURE;
} else {
flag |= CMD_FLAG_BOOTD;
}
}
#endif
/* If OK so far, then do the command */
if (!rc) {
int newrep;
if (ticks)
*ticks = get_timer(0);
rc = cmd_call(cmdtp, flag, argc, argv, &newrep);
if (ticks)
*ticks = get_timer(*ticks);
*repeatable &= newrep;
}
if (rc == CMD_RET_USAGE)
rc = cmd_usage(cmdtp);
return rc;
}run_list_real
|
第1行,其中,argc,argv就是超级终端、minicom等软件通过串口输入的一行经过处理的命令,比如我们输入“mmc write 85000000 20000 30000”,就是把内存中0x85000000的内容写到emmc,从emmc地址0x20000开始,长度为0x30000,一下我们都以此例子来说明。经过前面的命令解析之后,argc = 5,argv[0] = emmc, argv[1] = write, argv[2] = 85000000, argv[3] = 20000, argv[4] = 30000。
第20行,通过mmc命令搜索要执行的代码。
第21~25行,如果u-boot没有支持用户输入的这个命令就会退出,当我们输错命令,或者胡乱输入就会看到Unknown command xxx字样。
第28行,用户输入的命令参数个数不能大于cmdtp->maxargs这个最大的参数个数。
第49行,运行用户输入的命令,将命令传递于命令处理函数。
其中find_cmd函数负责查找用户输入的命令:
1 2 3 4 5 6 | cmd_tbl_t *find_cmd(const char *cmd)
{
cmd_tbl_t *start = ll_entry_start(cmd_tbl_t, cmd);
const int len = ll_entry_count(cmd_tbl_t, cmd);
return find_cmd_tbl(cmd, start, len);
}
|
第5行,以start为起始位置,开始从命令表中搜索命令。
上面提到了命令表,那它到底是什么样子呢?
cmd_tbl_s如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | struct cmd_tbl_s {
char *name; /* 命令的名字 */
int maxargs; /* 最大的参数数量 */
/*
* Same as ->cmd() except the command
* tells us if it can be repeated.
* Replaces the old ->repeatable field
* which was not able to make
* repeatable property different for
* the main command and sub-commands.
*/
int (*cmd_rep)(struct cmd_tbl_s *cmd, int flags, int argc,
char * const argv[], int *repeatable);
/* Implementation function */
int (*cmd)(struct cmd_tbl_s *, int, int, char * const []);
char *usage; /* Usage message (short) */
#ifdef CONFIG_SYS_LONGHELP
char *help; /* Help message (long) */
#endif
#ifdef CONFIG_AUTO_COMPLETE
/* do auto completion on the arguments */
int (*complete)(int argc, char * const argv[], char last_char, int maxv, char *cmdv[]);
#endif
};
|
还有两个重要的宏:
1 2 3 4 5 6 | #define U_BOOT_CMD_COMPLETE(_name, _maxargs, _rep, _cmd, _usage, _help, \
_comp) \
_CMD_REMOVE(sub_ ## _name, _cmd)
#define U_BOOT_CMD(_name, _maxargs, _rep, _cmd, _usage, _help) \
U_BOOT_CMD_COMPLETE(_name, _maxargs, _rep, _cmd, _usage, _help, NULL)
|
我们以上面的emmc为例,展开后变成下面这样。
1 2 3 4 5 6 7 8 9 10 11 12 13 | U_BOOT_CMD(
mmc, CONFIG_SYS_MAXARGS, 1, do_mmc,
"EMMC sub-system",
"info - show available EMMC devices\n"
"mmc device [dev] - show or set current device\n"
"mmc read - addr off|partition size\n"
"mmc write - addr off|partition size\n"
" read/write 'size' bytes starting at offset 'off'\n"
" to/from memory address 'addr', skipping bad blocks.\n"
"mmc read.raw - addr off|partition [count]\n"
"mmc write.raw - addr off|partition [count]\n"
" Use read.raw/write.raw to avoid ECC and access the flash as-is.\n"
);
|
name:命令的名,非字符串,但在U_BOOT_CMD中用“#”符号转化为字符串
maxargs:命令的最大参数个数
repeatable:是否自动重复(按Enter键是否会重复执行)
command:该命令对应的响应函数指针
usage:简短的使用说明
help:详细的使用说明
这些参数都会被存储在u-boot.lds文件所描述的.u_boot_list段中,
1 2 3 4 5 | . = ALIGN(4);
.u_boot_list : {
KEEP(*(SORT(.u_boot_list*)));
}
. = ALIGN(4);
|
2.3. u-boot加载内核阶段源代码分析¶
u-boot初始化好硬件,分配完内存。最后,u-boot要将控制权交给linux,u-boot在第一阶段进行重定位 的时候会将其第二阶段的整个u-boot重定位到内存中,内核也一样,因为内核是要运行在DDR中的,因此就要将内核重定位到DDR中。 前面我们讲了很多环境变量、设备树等,这些都要传递给linux内核,Linux会读取这些参数,并且根据这些参数进行配置,它们是如何进行数据传递的呢? 对于u-boot而言,它是可以自我自动的,不需要别人的干预,而对于linux内核而言,这就不一样了,他需要u-boot 帮他搭建好内核运行所必须的环境,配置各种寄存器,和硬件紧密联系的是u-boot,而Linux地重定位也是由u-boot完成地,当所有环境都搭建好并传递给内核参数之后,才能让linux内核正常 地运行,我们来看下调试信息中u-boot与Linux内核进行控制权交接的部分,其中地址0x80800000便是Linux的入口地址。

那么问题来了,既然要运行在DDR中,去哪里找内核镜像加载到DDR?这就就是我们经常说的从哪里启动的问题, 对于imx6ull EVK pro开发板而言,支持3种启动方式,也就是u-boot可以从3个地方获取linux内核,如NAND启动/EMMC启动、 SD卡启动、USB启动等。我们开发板上板载了启动方式选择地拨码开关,根据下面表格设置拨码开关就可以实现从不同介质中加载Linux内核到 DDR中运行,imx6ull在启动内核前会判断启动引脚地电平状态,根据启动引脚地电平状态选择不同的启动方式。
编号 |
名称 |
NAND FLASH |
eMMC |
SD |
USB |
|---|---|---|---|---|---|
1 |
MODE0 |
0 |
0 |
0 |
1 |
2 |
MODE1 |
1 |
1 |
1 |
0 |
3 |
CFG1-4 |
1 |
0 |
0 |
X |
4 |
CFG1-5 |
0 |
1 |
0 |
X |
5 |
CFG1-6 |
0 |
1 |
1 |
X |
6 |
CFG1-7 |
1 |
0 |
0 |
X |
7 |
CFG2-3 |
0 |
1 |
0 |
X |
8 |
CFG2-5 |
0 |
0 |
1 |
X |
当然,除了以上几种启动方式以外,u-boot还支持从网络下载远程服务器中的镜像的方式启动Linux内核,u-boot直接从远程服务器将镜像下载 到本地DDR中运行,并且可以挂载根文件系统到远程服务器。
不管是那种启动方式,最终都要将内核镜像加载到DDR中运行,当使用网络(tftp与nfs)启动时,还应该在u-boot的命令终端 上配置相应的环境变量,如本机ip、服务器ip、网关、子网掩码等,特别提示:需要设置板子ip与服务器ip在同一个网段上才可以实现网络数据访问。
接下来我们分析一下linux内核启动源码。
当u-boot执行bootcmd的命令后,最终会调用do_bootz函数启动Linux内核:
在do_bootz之前会运行一段启动脚本,该启动脚本在include/configs/npi_common.h文件中有相关描述。 我们挑一段启动脚本简要梳理一下。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 | #define UBI_BOOT \
"ubiboot=" \
"echo debug:[${devtype} ${ubidev}];" \
"if ${devtype} part rootfs; then " \
"setenv bootpart ${ubidev}:rootfs; " \
"ubifsmount ubi0;"\
"if test -e ${devtype} ${bootpart} /etc/fstab; then " \
"setenv ubipart 1;" \
"fi; " \
"echo Checking for: uEnv.txt ...;" \ //检查配置文件uEnv.txt
"if test -e ${devtype} ${bootpart} uEnv.txt; then " \
"if run nandbootnev; then " \
"echo Loaded environment from uEnv.txt;" \
"run importbootenv;" \
"fi;" \
"echo Checking if client_ip is set ...;" \
"if test -n ${client_ip}; then " \
"if test -n ${dtb}; then " \
"setenv fdtfile ${dtb};" \
"echo using ${fdtfile} ...;" \
"fi;" \
"if test -n ${uname_r}; then " \
"echo Running nfsboot_uname_r ...;" \
"run nfsboot_uname_r;" \
"fi;" \
"echo Running nfsboot ...;" \
"run nfsboot;" \
"fi;" \
"fi; " \
"echo Checking for: /${script} ...;" \
"if test -e ${devtype} ${bootpart} /${script}; then " \
"setenv scriptfile ${script};" \
"run loadbootscript;" \
"echo Loaded script from ${scriptfile};" \
"run bootscript;" \
"fi; " \
"echo Checking for: /boot/${script} ...;" \
"if test -e ${devtype} ${bootpart} /boot/${script}; then " \ //检查脚本文件是否存在
"setenv scriptfile /boot/${script};" \ //设置脚本文件
"run loadbootscript;" \ //加载启动脚本
"echo Loaded script from ${scriptfile};" \ //打印从scriptfile中加载脚本
"run bootscript;" \ //执行启动脚本
"fi; " \
"echo Checking for: /boot/uEnv.txt ...;" \ //检查/boot/uEnv.txt,该脚本为fire-config主要的配置脚本
"for i in 1 2 3 4 5 6 7 ; do " \
"setenv ubipart ${i};" \
"setenv curpart ${ubidev}:${ubipart};" \
"if test -e ${devtype} ${curpart} /boot/uEnv.txt; then " \ //判断/boot/uEnv.txt文件是否存在
"setenv bootpart ${mmcdev}:${mmcpart};" \
"ubifsload ${loadaddr} /boot/uEnv.txt;" \ //加载/boot/uEnv.txt配置文件
"env import -t ${loadaddr} ${filesize};" \
"echo Loaded environment from /boot/uEnv.txt;" \ //从/boot/uEnv.txt中加载环境变量
"fi;" \
"if test -e ${devtype} ${curpart} /bin/sh; then " \ //判断/bin/sh文件是否存在
"setenv rootpart ${ubidev}:${ubipart};" \
"if test -n ${dtb}; then " \ //如果${dtb}字符串(即imx6ull-seeed-npi.dtb)长度不为零则运行下面语句
"echo debug: [dtb=${dtb}] ... ;" \ //打印所使用的设备树文件(imx6ull-seeed-npi.dtb)
"setenv fdtfile ${dtb};" \ //设置环境变量中设备树文件为imx6ull-seeed-npi.dtb
"echo Using: dtb=${fdtfile} ...;" \ //使用设备树文件,在/boot/uEnv中设备树文件被配置为imx6ull-seeed-npi.dtb
"fi;" \
"echo Checking if uname_r is set in /boot/uEnv.txt...;" \ //检查/boot/uEnv.txt文件中是否设置了uname_r(内核版本)信息
"if test -n ${uname_r}; then " \ //如果/boot/uEnv.txt文件中设置了uname_r
"setenv oldroot /dev/ubi${ubidev}p${ubipart};" \
"echo Running uname_boot ...;" \
"run uname_nandboot;" \ //运行uname_nandboot,uname_nandboot又是一段脚本
"fi;" \
"fi;" \
"done;" \
"fi;\0" \
#define NPI_UNAME_NANDBOOT \
"uname_nandboot="\
......
"bootz ${loadaddr} ${rdaddr}:${rdsize} ${fdtaddr}; " \ //最终会运行bootz命令来启动Linux内核,告知linux镜像存放在那个地址,设备树放在哪里
|
执行完上面的脚本后,在串口终端会输出相应的信息,如下所示。



由上脚本可知,最终会执行bootz命令,那么我们看下bootz命令是什么。
1 2 3 4 | U_BOOT_CMD(
bootz, CONFIG_SYS_MAXARGS, 1, do_bootz,
"boot Linux zImage image from memory", bootz_help_text
);
|
我们可以看到第2行,执行bootz命令会调用do_bootz函数。
do_bootz函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 | int do_bootz(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[])
{
int ret;
/* Consume 'bootz' */
argc--; argv++;
if (bootz_start(cmdtp, flag, argc, argv, &images))
return 1;
/*
* We are doing the BOOTM_STATE_LOADOS state ourselves, so must
* disable interrupts ourselves
*/
bootm_disable_interrupts(); //关闭中断
images.os.os = IH_OS_LINUX; //表示使用的是linux
ret = do_bootm_states(cmdtp, flag, argc, argv,
#ifdef CONFIG_SYS_BOOT_RAMDISK_HIGH
BOOTM_STATE_RAMDISK |
#endif
BOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO |
BOOTM_STATE_OS_GO,
&images, 1);
return ret;
}
|
第7行,设置并找到linux镜像的入口点。
第14行,由于需要加载linux镜像,所以必须关闭中断。
下面我们将详细分析do_bootz函数的细节,首先我们看到第7行中使用了images这个全局变量作为镜像的信息和交换的数据要用到的信息, images是一个很重要的全局变量。它的类型是bootm_headers_t,其定义如下(删除了不符合条件编译部分,展开部分重要结构):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 | typedef struct bootm_headers {neg
image_header {
__be32 ih_magic; /* 镜像头部幻数,为include/image.h中的 IH_MAGIC = 0x27051956 */
__be32 ih_hcrc; /* 镜像头部crc校验码 */
__be32 ih_time; /* 镜像创建时间戳 */
__be32 ih_size; /* 镜像数据大小(除去头部) */
__be32 ih_load; /* 数据将要载入的内存地址 */
__be32 ih_ep; /* 镜像入口地址 */
__be32 ih_dcrc; /* 镜像数据校验码 */
uint8_t ih_os; /* 操作系统类型:IH_OS_LINUX */
uint8_t ih_arch; /* CPU架构类型:IH_ARCH_ARM */
uint8_t ih_type; /* 镜像类型:IH_TYPE_KERNEL */
uint8_t ih_comp; /* 压缩的类型:IH_COMP_NONE */
uint8_t ih_name[IH_NMLEN]; /* 镜像名字 IH_NMLEN = 32 */
} *legacy_hdr_os, /* 镜像头部指针ne'g */
legacy_hdr_os_copy; /* header copy */
ulong legacy_hdr_valid;
image_info {
ulong start, end; /* 镜像的起始地址和结束地址 */
ulong image_start, image_len; /* 镜像的起始地址和长度 */
ulong load; /* 镜像的加载地址 */
uint8_t comp, type, os; /* 压缩, 镜像的类型, 操作系统的类型 */
uint8_t arch; /* cpu的架构 */
} os;
ulong ep; /* 操作系统的入口点 */
ulong rd_start, rd_end; /* ramdisk的起始地址和结束地址 */
char *ft_addr; /* 设备树地址 */
ulong ft_len; /* 设备树所占用的长度 */
ulong initrd_start;
ulong initrd_end;
ulong cmdline_start; //命令行起始地址
ulong cmdline_end; //命令行结束地址
bd_t *kbd;
int verify; /* env_get("verify")[0] != 'n' */
#define BOOTM_STATE_START (0x00000001) //要执行的状态
#define BOOTM_STATE_FINDOS (0x00000002)
#define BOOTM_STATE_FINDOTHER (0x00000004)
#define BOOTM_STATE_LOADOS (0x00000008)
#define BOOTM_STATE_RAMDISK (0x00000010)
#define BOOTM_STATE_FDT (0x00000020)
#define BOOTM_STATE_OS_CMDLINE (0x00000040)
#define BOOTM_STATE_OS_BD_T (0x00000080)
#define BOOTM_STATE_OS_PREP (0x00000100)
#define BOOTM_STATE_OS_FAKE_GO (0x00000200) /* 'Almost' run the OS */
#define BOOTM_STATE_OS_GO (0x00000400)
int state; //状态
} bootm_headers_t;
extern bootm_headers_t images; //声明给外部调用
|
看完image结构之后,我们继续回到do_bootz函数中的bootz_start函数去继续分析。
bootz_start函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 | static int bootz_start(cmd_tbl_t *cmdtp, int flag, int argc,
char * const argv[], bootm_headers_t *images)
{
int ret;
ulong zi_start, zi_end;
ret = do_bootm_states(cmdtp, flag, argc, argv, BOOTM_STATE_START,
images, 1);
/* Setup Linux kernel zImage entry point */
if (!argc) {
images->ep = load_addr;
debug("* kernel: default image load address = 0x%08lx\n",
load_addr);
} else {
images->ep = simple_strtoul(argv[0], NULL, 16); //将内核入口点字符串转成无符号长整型的十六进制数值:0x80800000
debug("* kernel: cmdline image address = 0x%08lx\n",
images->ep);
}
ret = bootz_setup(images->ep, &zi_start, &zi_end);
if (ret != 0)
return 1;
lmb_reserve(&images->lmb, images->ep, zi_end - zi_start);
/*
* Handle the BOOTM_STATE_FINDOTHER state ourselves as we do not
* have a header that provide this informaiton.
*/
if (bootm_find_images(flag, argc, argv)) //找到镜像的位置
return 1;
#ifdef CONFIG_SECURE_BOOT
extern int authenticate_image(
uint32_t ddr_start, uint32_t raw_image_size);
if (authenticate_image(images->ep, zi_end - zi_start) != 0) {
printf("Authenticate zImage Fail, Please check\n");
return 1;
}
#endif
return 0;
}
1. 第7行,do_bootm_states函数:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 | int do_bootm_states(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[],
int states, bootm_headers_t *images, int boot_progress)
{
boot_os_fn *boot_fn;
ulong iflag = 0;
int ret = 0, need_boot_fn;
images->state |= states; //经过打印得知,镜像执行的状态有:BOOTM_STATE_START、BOOTM_STATE_RAMDISK、BOOTM_STATE_OS_PREP、BOOTM_STATE_OS_FAKE_GO、BOOTM_STATE_OS_GO,为缩减代码,删去未执行状态相关的代码。
if (states & BOOTM_STATE_START)
ret = bootm_start(cmdtp, flag, argc, argv);
/* From now on, we need the OS boot function */
if (ret)
return ret;
boot_fn = bootm_os_get_boot_func(images->os.os);
need_boot_fn = states & (BOOTM_STATE_OS_CMDLINE |
BOOTM_STATE_OS_BD_T | BOOTM_STATE_OS_PREP |
BOOTM_STATE_OS_FAKE_GO | BOOTM_STATE_OS_GO);
if (boot_fn == NULL && need_boot_fn) {
if (iflag)
enable_interrupts();
printf("ERROR: booting os '%s' (%d) is not supported\n",
genimg_get_os_name(images->os.os), images->os.os);
bootstage_error(BOOTSTAGE_ID_CHECK_BOOT_OS);
return 1;
}
/* Call various other states that are not generally used */
if (!ret && (states & BOOTM_STATE_OS_CMDLINE))
ret = boot_fn(BOOTM_STATE_OS_CMDLINE, argc, argv, images);
if (!ret && (states & BOOTM_STATE_OS_BD_T))
ret = boot_fn(BOOTM_STATE_OS_BD_T, argc, argv, images);
if (!ret && (states & BOOTM_STATE_OS_PREP)) {
ret = boot_fn(BOOTM_STATE_OS_PREP, argc, argv, images);
}
/* Check for unsupported subcommand. */
if (ret) {
puts("subcommand not supported\n");
return ret;
}
/* Now run the OS! We hope this doesn't return */
if (!ret && (states & BOOTM_STATE_OS_GO))
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_GO,
images, boot_fn);
/* Deal with any fallout */
err:
if (iflag)
enable_interrupts();
if (ret == BOOTM_ERR_UNIMPLEMENTED)
bootstage_error(BOOTSTAGE_ID_DECOMP_UNIMPL);
else if (ret == BOOTM_ERR_RESET)
do_reset(cmdtp, flag, argc, argv);
return ret;
}
|
do_bootm_states函数首先调用bootm_start,如下,因为函数调用比较多,所以将函数说明写在注释中:
1 2 3 4 5 6 7 8 9 10 11 12 | static int bootm_start(cmd_tbl_t *cmdtp, int flag, int argc,
char * const argv[])
{
memset((void *)&images, 0, sizeof(images)); //清空前面讲到的image结构
images.verify = env_get_yesno("verify"); // verify = -1
boot_start_lmb(&images); //空函数
bootstage_mark_name(BOOTSTAGE_ID_BOOTM_START, "bootm_start"); //标记引导阶段
images.state = BOOTM_STATE_START; //标记为开始状态
return 0;
}
|
最后进入到do_bootm_linux函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | int do_bootm_linux(int flag, int argc, char * const argv[],
bootm_headers_t *images)
{
/* No need for those on ARM */
if (flag & BOOTM_STATE_OS_BD_T || flag & BOOTM_STATE_OS_CMDLINE)
return -1;
if (flag & BOOTM_STATE_OS_PREP) {
boot_prep_linux(images);
return 0;
}
if (flag & (BOOTM_STATE_OS_GO | BOOTM_STATE_OS_FAKE_GO)) {
boot_jump_linux(images, flag);
return 0;
}
boot_prep_linux(images);
boot_jump_linux(images, flag);
return 0;
}
|
我们简单看下do_bootm_linux函数的调用顺序。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | do_bootm_linux(int flag, int argc, char * const argv[], bootm_headers_t *images)
boot_prep_linux(images) //Linux与启动相关设置,将环境变量bootargs保存以便后面传递给内核
image_setup_linux(images)
boot_fdt_add_mem_rsv_regions //为fdt保留一块内存
boot_relocate_fdt //重定向设备树,
image_setup_libfdt
fdt_root //在引导Linux之前,将数据添加到FDT的根节点中
fdt_chosen 寻找 chosen node ,如果没有这个节点则创建
env_get("bootargs"); //得到启动参数
fdt_setprop(fdt, nodeoffset, "bootargs", str, strlen(str) + 1); //把"bootargs"设置成设备树的属性
arch_fixup_fdt
or (bank = 0; bank < CONFIG_NR_DRAM_BANKS; bank++) {
start[bank] = bd->bi_dram[bank].start;
size[bank] = bd->bi_dram[bank].size;
} //获取内存的起始地址与长度
fdt_fixup_memory_banks(blob, start, size, CONFIG_NR_DRAM_BANKS);//修复或创建内存节点
fdt_update_ethernet_dt(blob); //更新网络相关的fdt
fdt_fixup_ethernet(blob); //更新网络节点
boot_jump_linux(images, flag);
machid = gd->bd->bi_arch_number //得到机器ID,主要用于Linux检查,若Linux的ID表中有这个机器ID才会启动。
void (*kernel_entry)(int zero, int arch, uint params) //定义一个函数指针kernel_entry
kernel_entry = (void (*)(int, int, uint))images->ep //将images ->ep内核入口点强制类型转换为kernel_entry函数指针
announce_and_cleanup(fake) //清除
printf("\nStarting kernel ...%s\n\n", fake ?"(fake run for tracing)" : "");//打印字符串,表示Linux内核启动中
cleanup_before_linux(void) //关闭且清空cache
r2 = (unsigned long)images->ft_addr //以设fdt方式传递参数
kernel_entry(0, machid, r2) //启动Linux内核
|
第21行,images->ep中的ep是entrypoint的缩写,这便是程序的入口点,该行代码将ep赋值给kernel_entry,而这个函数指针指向的是在内存中加载linux镜像的入口地址,也就是linux第一个将要执行的代码。
第24行,当内核正常启动时会打印“Starting kernel …”,说明已经成功的加载了linux镜像,校验成功,并找到了入口地址,若未打印该字符型串,则应该检查一下传参是否正确。
第27行,启动Linux内核,kernel_entry函数为汇编函数,其传参形式和前面我们分析汇编调用c函数的传参方式(ARM程序调用规则ATPCS)是类似的,也就是r0存放第一个参数0、r1存放第二个参数machid(机器ID告诉Linux内核我们用的是哪个cpu,从而调用相应的初始化函数)、r2存放第三个参数(设备树首地址),注意我们使用的是设备树的方式传参,而非传统的ATAG方式传参,传统的传参是将struct tag地址赋值给r2寄存器。
u-boot mainline 从v1.1.3开始便支持设备树,其对ARM的支持则是和ARM内核支持Device Tree同期完成。 由于我们在configs/mx6ull_npi_defconfig配置文件中定义了CONFIG_OF_LIBFDT=y,从而使能了设备树传参形式, u-boot将从启动介质中将设备树读取到内存。当然,设备树的存放位置并不是随意存放的,它必须保证不能破坏u-boot、不能破坏操作系统及其用到的内存空间, 不能占用他们的内存。
总结:
首先根据启动方式,从存放镜像的介质中加载到ddr。
检查、校验是哪类镜像。
传递参数给内核。
运行内核。
笔者分析,这是典型的函数调用过程,全局搜索v7_arch_cp15_set_acr,在arch/arm/cpu/armv7/cp15.c有该函数的实现,如下所示:
1 2 3 4 5 | void __weak v7_arch_cp15_set_acr(u32 acr, u32 cpu_midr, u32 cpu_rev_comb,
u32 cpu_variant, u32 cpu_rev)
{
asm volatile ("mcr p15, 0, %0, c1, c0, 1\n\t" : : "r"(acr));
}
|
这是一段内嵌汇编函数,该函数主要作用是设置ACTLR(辅助控制寄存器),关于ACTLR的具体描述,大家可以参考e 《Cortex-A7 Technical ReferenceManua》,我们分析一下它是如何进行函数调用以及参数传递的。首先函数v7_arch_cp15_set_acr调用之前都进行了push入栈操作,它是将{r1-r5}这五个寄存器都压入堆栈中, 不同于x86的参数传递规则,ARM程序调用规则ATPCS(ARM-Thumb Procedure Call Standard)建议函数的形参不超过4个,如果形参个数少于或等于4,则形参由R0,R1,R2,R3四个寄存器进行传递,其中r0传递给第一个参数、r1传递给第2个……;若形参个数大于4,则大于4的部分必须通过堆栈进行传递。 显然函数v7_arch_cp15_set_acr共有5个参数acr、cpu_midr、cpu_rev_comb、cpu_variant、cpu_rev,所以大于4的部分必须通过堆栈进行传递,而这里是将{r1-r5}全都入栈了,其中{r0-r4}5个寄存器的值分别作为v7_arch_cp15_set_acr函数的5个参数 来传递,为什么不采用x86的方式都用栈传递?因为麻烦呀,而且经常入栈出栈耗时间。第4行,v7_arch_cp15_set_acr函数中有一段内嵌汇编代码,其中“%0”就是变量acr的值也就是r0寄存器中的值,也就是ACTLR寄存器,因为前面已经将ACTLR读入到r0中,并且改变了r0的值。r1存储的是MIDR(Main ID Register), MIDR提供处理器的标识信息,包括设备的实现代码和设备ID号,MIDR和其他寄存器({r2-r4})的值都没有用到,所以我们就不追究了,大概知道其调用规则即可。函数调用完后需要将调用前入栈的数据给pop(出栈)掉。
到此cpu_init_cp15函数基本上分析完了,接下来继续分析cpu_init_crit函数,代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | #ifndef CONFIG_SKIP_LOWLEVEL_INIT
/*************************************************************************
*
* CPU_init_critical registers
*
* setup important registers
* setup memory timing
*
*************************************************************************/
ENTRY(cpu_init_crit)
/*
* Jump to board specific initialization...
* The Mask ROM will have already initialized
* basic memory. Go here to bump up clock rate and handle
* wake up conditions.
*/
b lowlevel_init @ go setup pll,mux,memory
ENDPROC(cpu_init_crit)
#endif
|
第1行,如果没有定义CONFIG_SKIP_LOWLEVEL_INIT,则编译cpu_init_crit相关代码段,源码中搜索CONFIG_SKIP_LOWLEVEL_INIT,发现其确实未被定义。
第17行,跳转至lowlevel_init函数执行。
由于lowlevel_init完成了内存的初始化工作,而内存的初始化依赖于开发板,所以lowlevel_init于当前imx6u相关, lowlevel_init函数是与特定开发板相关的初始化函数,在这个函数里会做一些pll初始化, 如果不是从内存启动,则会做内存初始化,方便后续拷贝到内存中运行。 全局搜索lowlevel_init发现其在arch/arm/cpu/armv7/lowlevel_init.S文件中有定义:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 | WEAK(lowlevel_init)
/*
* Setup a temporary stack. Global data is not available yet.
*/
#if defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr sp, =CONFIG_SPL_STACK
#else
ldr sp, =CONFIG_SYS_INIT_SP_ADDR
#endif
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */
#ifdef CONFIG_SPL_DM
mov r9, #0
#else
/*
* Set up global data for boards that still need it. This will be
* removed soon.
*/
#ifdef CONFIG_SPL_BUILD
ldr r9, =gdata
#else
sub sp, sp, #GD_SIZE
bic sp, sp, #7
mov r9, sp
#endif
#endif
/*
* Save the old lr(passed in ip) and the current lr to stack
*/
push {ip, lr}
/*
* Call the very early init function. This should do only the
* absolute bare minimum to get started. It should not:
*
* - set up DRAM
* - use global_data
* - clear BSS
* - try to start a console
*
* For boards with SPL this should be empty since SPL can do all of
* this init in the SPL board_init_f() function which is called
* immediately after this.
*/
bl s_init
pop {ip, pc}
ENDPROC(lowlevel_init)
|
忽略不符合条件编译的代码。
第8行,设置栈指针指向CONFIG_SYS_INIT_SP_ADDR,而CONFIG_SYS_INIT_SP_ADDR具体是什么?它在include/configs/mx6ullevk.h文件中有如下定义:
1 2 3 4 5 6 7 8 9 10 11 | /* Physical Memory Map */
#define PHYS_SDRAM MMDC0_ARB_BASE_ADDR
#define CONFIG_SYS_SDRAM_BASE PHYS_SDRAM
#define CONFIG_SYS_INIT_RAM_ADDR IRAM_BASE_ADDR
#define CONFIG_SYS_INIT_RAM_SIZE IRAM_SIZE
#define CONFIG_SYS_INIT_SP_OFFSET \
(CONFIG_SYS_INIT_RAM_SIZE - GENERATED_GBL_DATA_SIZE)
#define CONFIG_SYS_INIT_SP_ADDR \
(CONFIG_SYS_INIT_RAM_ADDR + CONFIG_SYS_INIT_SP_OFFSET)
|
上述代码段可以总结出:CONFIG_SYS_INIT_SP_ADDR = IRAM_BASE_ADDR + (IRAM_SIZE - GENERATED_GBL_DATA_SIZE), IRAM_BASE_ADDR在arch/arm/include/asm/arch-mx6/imx-regs.h定义为0x00900000, IRAM_SIZE在arch/arm/include/asm/arch-mx6/imx-regs.h中定义为0x00020000,如下所示:
1 2 3 4 5 6 7 | #if !(defined(CONFIG_MX6SX) || \
defined(CONFIG_MX6UL) || defined(CONFIG_MX6ULL) || \
defined(CONFIG_MX6SLL) || defined(CONFIG_MX6SL))
#define IRAM_SIZE 0x00040000
#else
#define IRAM_SIZE 0x00020000
#endif
|
在.config文件中我们配置了CONFIG_MX6ULL=y,所以条件不成立,即定义IRAM_SIZE = 0x00020000,.config部分配置文件如下所示:
1 2 3 4 5 6 7 8 | CONFIG_SYS_TEXT_BASE=0x87800000
CONFIG_SYS_MALLOC_F_LEN=0x400
# CONFIG_SECURE_BOOT is not set
CONFIG_MX6=y
CONFIG_MX6ULL=y
CONFIG_LDO_BYPASS_CHECK=y
# CONFIG_MODULE_FUSE is not set
# CONFIG_TARGET_ADVANTECH_DMS_BA16 is not set
|
由此可见.config配置文件与我们的代码息息相关,大家可修改.config中的配置项来定制我们自己的u-boot,比如 修改CONFIG_BOOTDELAY=3,可以设置uboot启动延时;修改CONFIG_BAUDRATE=115200设置串口波特率。当然我们可以使用更人性化 的make menuconfig来配置u-boot,配置好后,就会在u-boot根目录下生成最新的.config文件,u-boot根据这些配置文件来决定该如何编译 u-boot源码,不多说了,继续往下分析。
GENERATED_GBL_DATA_SIZE在include/generated/generic-asm-offsets.h中定义为256,转换成十六进制为0x00000100。 故CONFIG_SYS_INIT_SP_ADDR = (0x00900000 + (0x00020000 - 0x00000100)) = 0x0091ff00。
第10行,根据英文注释可知,它是要遵从ABI的8字节对齐。
第21行,将堆栈指针减去GD_SIZE,GD_SIZE在include/generated/generic-asm-offsets.h中被定义为256,即sp = sp - 0x00000100.
第22行,和上面一样遵从ABI的8字节对齐。
第23行,将sp的值存储在r9寄存器当中。
第29行,将ip和pc压入栈中。
第44行,调用s_init函数。
第45行,将ip和pc出栈,入栈出栈是函数调用的常规操作,大家习惯就好。
全局搜索s_init,发现s_init函数为一个空的函数,里面什么也没做,如下所示:
1 2 3 | void s_init(void)
{
}
|
所以到此lowlevel_init函数就大致分析完了,lowlevel_init函数返回后,我们又回到了最初arch/arm/cpu/armv7/start.S文件中 cpu_init_crit的返回处,即接下来将进入_main函数。
1 2 3 4 5 6 | #ifndef CONFIG_SKIP_LOWLEVEL_INIT_ONLY
bl cpu_init_crit
#endif
#endif
bl _main
|
全局搜索_main,发现它在arch/arm/lib/crt0.S中有定义:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | ENTRY(_main)
/*
* Set up initial C runtime environment and call board_init_f(0).
*/
#if defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr r0, =(CONFIG_SPL_STACK)
#else
ldr r0, =(CONFIG_SYS_INIT_SP_ADDR)
#endif
bic r0, r0, #7 /* 8-byte alignment for ABI compliance */
mov sp, r0
bl board_init_f_alloc_reserve
mov sp, r0
/* set up gd here, outside any C code */
mov r9, r0
bl board_init_f_init_reserve
mov r0, #0
bl board_init_f
|
看到_main是否有一种莫名的熟悉感?其实我们在stm32中的startup_stm32f10x_hd.s文件中也能看到_main的身影, 其实它们都有点类似。上面代码中主要是初始化c语言的运行环境,众所周知,c的运行依赖函数的调用及传参等,所以不可或缺的要用到 堆栈。
第7行,不满足条件编译,忽略。
第10行,加载CONFIG_SYS_INIT_SP_ADDR到r0寄存器,CONFIG_SYS_INIT_SP_ADDR的值我们在前面已经计算过了,这里就不重复了,CONFIG_SYS_INIT_SP_ADDR = 0x0091ff00,详情参考include/configs/mx6ullevk.h文件。
第12行,遵从ABI的8字节对齐,为什么要保证堆栈8字节对齐?AAPCS规则要求堆栈保持8字节对齐。如果不对齐,调用一般的函数也是没问题的。但是当调用需要严格遵守AAPCS规则的函数时可能会出错。例如调用sprintf输出一个浮点数时,栈必须是8字节对齐的,否则结果可能会出错。
第13行,将堆栈指针指向r0寄存器的值,由于r0本就是对齐的,所以sp=0x0091ff00。
第14行,调用board_init_f_alloc_reserve函数,该函数有一个参数top,根据ARM函数调用规则,top=r0=0x0091ff00,该函数主要作用是保留早期malloc区域,且为GD(全局数据区)留出空间,函数返回值也是r0,r0保存着预留早期malloc区域和GD后的地址,r0 = 0x0091ff00 - (0x400(early malloc arena) + 0x100(GD_SIZE)) = 0x0091fa00,详情查阅common/init/board_init.c。
第17行,根据英文注释,即设置GD为r0的值,即GD地址为0x0091fa00,gd是一个保存在ARM的r9寄存器中的gd_t结构体的指针,当使用gd_t前要用DECLARE_GLOBAL_DATA_PTR来声明,以指定占用r9寄存器,这个声明可避免编译器把r9分配给其它的变量,如下所示:
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r9")
上面是定义一个寄存器全局变量指针,并指定其使用的寄存器是r9,类型为gd_t。 因为并没有定义整个全局结构体变量,编译器没有给该结构体存放区域,所以需要自己手动分配gd_t结构体 的存储地址区域,可以说gd_t结构体几乎包含了u-boot中用到的所有全局变量, gd_t和bd_t都u-boot中两个重要的数据结构,在初始化操作很多都要靠这两个数据结构来保存或传递。 gd_t结构体如下所示:
typedef struct global_data {
bd_t *bd; /* board_info结构体指针,用来保存板子信息,如波特率、ip地址、启动参数等 */
unsigned long flags; /* 用于指示的标志,如板子是否已初始化、串口是否打开 */
unsigned int baudrate; /* 串口波特率 */
unsigned long cpu_clk; /* cpu时钟频率 */
unsigned long bus_clk; /* 总线时钟频率 */
/* We cannot bracket this with CONFIG_PCI due to mpc5xxx */
unsigned long pci_clk; /* pci时钟频率 */
unsigned long mem_clk; /* 内存时钟频率 */
#if defined(CONFIG_LCD) || defined(CONFIG_VIDEO)
unsigned long fb_base; /* 如果定义了CONFIG_LCD或CONFIG_VIDEO,则此变量保存frameBuffer内存的基地址 */
#endif
#if defined(CONFIG_POST)
unsigned long post_log_word; /* Record POST activities */
unsigned long post_log_res; /* success of POST test */
unsigned long post_init_f_time; /* When post_init_f started */
#endif
#ifdef CONFIG_BOARD_TYPES
unsigned long board_type; /* 板子类型 */
#endif
unsigned long have_console; /* 用于记录串口是否已初始化 */
#if CONFIG_IS_ENABLED(PRE_CONSOLE_BUFFER)
unsigned long precon_buf_idx; /* 串口未初始化前用于保存要打印数据的缓冲区索引 */
#endif
unsigned long env_addr; /* 环境参数地址 */
unsigned long env_valid; /* 环境参数CRC校验是否有效标志 */
unsigned long env_has_init; /* Bitmask of boolean of struct env_location offsets */
int env_load_prio; /* 加载环境的优先级 */
unsigned long ram_base; /* U-Boot所占用RAM的基地址 */
unsigned long ram_top; /* Top address of RAM used by U-Boot */
unsigned long relocaddr; /* u-boot占用RAM的起始地址 */
phys_size_t ram_size; /* RAM的大小 */
unsigned long mon_len; /* monitor len */
unsigned long irq_sp; /* irq栈指针 */
unsigned long start_addr_sp; /* 栈指针起始地址 */
unsigned long reloc_off; /* 重定位偏移,就是实际定向的位置与编译连接时指定的位置之差,一般为0 */
struct global_data *new_gd; /* 新分配的全局数据区指针 */
#ifdef CONFIG_DM
struct udevice *dm_root; /* Root instance for Driver Model */
struct udevice *dm_root_f; /* Pre-relocation root instance */
struct list_head uclass_root; /* Head of core tree */
#endif
#ifdef CONFIG_TIMER
struct udevice *timer; /* Timer instance for Driver Model */
#endif
const void *fdt_blob; /* 设备树 */
void *new_fdt; /* Relocated FDT */
unsigned long fdt_size; /* Space reserved for relocated FDT */
#ifdef CONFIG_OF_LIVE
struct device_node *of_root;
#endif
#if CONFIG_IS_ENABLED(MULTI_DTB_FIT)
const void *multi_dtb_fit; /* uncompressed multi-dtb FIT image */
#endif
struct jt_funcs *jt; /* jump table */
char env_buf[32]; /* buffer for env_get() before reloc. */
#ifdef CONFIG_TRACE
void *trace_buff; /* The trace buffer */
#endif
#if defined(CONFIG_SYS_I2C)
int cur_i2c_bus; /* 当前使用的i2c总线 */
#endif
#ifdef CONFIG_SYS_I2C_MXC
void *srdata[10];
#endif
unsigned int timebase_h;
unsigned int timebase_l;
#if CONFIG_VAL(SYS_MALLOC_F_LEN)
unsigned long malloc_base; /* 早期malloc()的基地址 */
unsigned long malloc_limit; /* limit address */
unsigned long malloc_ptr; /* current address */
#endif
#ifdef CONFIG_PCI
struct pci_controller *hose; /* PCI hose for early use */
phys_addr_t pci_ram_top; /* top of region accessible to PCI */
#endif
#ifdef CONFIG_PCI_BOOTDELAY
int pcidelay_done;
#endif
struct udevice *cur_serial_dev; /* current serial device */
struct arch_global_data arch; /* architecture-specific data */
#ifdef CONFIG_CONSOLE_RECORD
struct membuff console_out; /* console output */
struct membuff console_in; /* console input */
#endif
#ifdef CONFIG_DM_VIDEO
ulong video_top; /* Top of video frame buffer area */
ulong video_bottom; /* Bottom of video frame buffer area */
#endif
#ifdef CONFIG_BOOTSTAGE
struct bootstage_data *bootstage; /* Bootstage information */
struct bootstage_data *new_bootstage; /* Relocated bootstage info */
#endif
#ifdef CONFIG_LOG
int log_drop_count; /* Number of dropped log messages */
int default_log_level; /* For devices with no filters */
struct list_head log_head; /* List of struct log_device */
int log_fmt; /* Mask containing log format info */
#endif
#if CONFIG_IS_ENABLED(BLOBLIST)
struct bloblist_hdr *bloblist; /* Bloblist information */
struct bloblist_hdr *new_bloblist; /* Relocated blolist info */
# ifdef CONFIG_SPL
struct spl_handoff *spl_handoff;
# endif
#endif
} gd_t;
bd_t结构体如下所示:
typedef struct bd_info {
unsigned long bi_memstart; /* DRAM起始地址 */
phys_size_t bi_memsize; /* DRAM大小(单位:字节) */
unsigned long bi_flashstart; /* flash起始地址 */
unsigned long bi_flashsize; /* flash大小 */
unsigned long bi_flashoffset; /* reserved area for startup monitor */
unsigned long bi_sramstart; /* SRAM起始地址 */
unsigned long bi_sramsize; /* SRAM大小 */
#ifdef CONFIG_ARM
unsigned long bi_arm_freq; /* arm频率 */
unsigned long bi_dsp_freq; /* dsp核频率 */
unsigned long bi_ddr_freq; /* ddr频率 */
#endif
#if defined(CONFIG_MPC8xx) || defined(CONFIG_E500) || defined(CONFIG_MPC86xx)
unsigned long bi_immr_base; /* base of IMMR register */
#endif
#if defined(CONFIG_M68K)
unsigned long bi_mbar_base; /* base of internal registers */
#endif
#if defined(CONFIG_MPC83xx)
unsigned long bi_immrbar;
#endif
unsigned long bi_bootflags; /* boot / reboot flag (Unused) */
unsigned long bi_ip_addr; /* IP Address */
unsigned char bi_enetaddr[6]; /* OLD: see README.enetaddr */
unsigned short bi_ethspeed; /* Ethernet speed in Mbps */
unsigned long bi_intfreq; /* Internal Freq, in MHz */
unsigned long bi_busfreq; /* Bus Freq, in MHz */
#if defined(CONFIG_CPM2)
unsigned long bi_cpmfreq; /* CPM_CLK Freq, in MHz */
unsigned long bi_brgfreq; /* BRG_CLK Freq, in MHz */
unsigned long bi_sccfreq; /* SCC_CLK Freq, in MHz */
unsigned long bi_vco; /* VCO Out from PLL, in MHz */
#endif
#if defined(CONFIG_M68K)
unsigned long bi_ipbfreq; /* IPB Bus Freq, in MHz */
unsigned long bi_pcifreq; /* PCI Bus Freq, in MHz */
#endif
#if defined(CONFIG_EXTRA_CLOCK)
unsigned long bi_inpfreq; /* input Freq in MHz */
unsigned long bi_vcofreq; /* vco Freq in MHz */
unsigned long bi_flbfreq; /* Flexbus Freq in MHz */
#endif
#ifdef CONFIG_HAS_ETH1
unsigned char bi_enet1addr[6]; /* OLD: see README.enetaddr */
#endif
#ifdef CONFIG_HAS_ETH2
unsigned char bi_enet2addr[6]; /* OLD: see README.enetaddr */
#endif
#ifdef CONFIG_HAS_ETH3
unsigned char bi_enet3addr[6]; /* OLD: see README.enetaddr */
#endif
#ifdef CONFIG_HAS_ETH4
unsigned char bi_enet4addr[6]; /* OLD: see README.enetaddr */
#endif
#ifdef CONFIG_HAS_ETH5
unsigned char bi_enet5addr[6]; /* OLD: see README.enetaddr */
#endif
ulong bi_arch_number; /* unique id for this board */
ulong bi_boot_params; /* where this board expects params */
#ifdef CONFIG_NR_DRAM_BANKS
struct { /* RAM BANKS 配置,起始地址和长度 */
phys_addr_t start;
phys_size_t size;
} bi_dram[CONFIG_NR_DRAM_BANKS];
#endif /* CONFIG_NR_DRAM_BANKS */
} bd_t;
第18行,调用board_init_f_init_reserve函数,该函数主要作用是将GD区域清零,返回最初malloc区域的地址,即 0x0091fb00 = 0x0091fa00 + 0x100(GD_SIZE)。
第20~22行,清空r0,然后把参数r0传给board_init_f函数,并调用board_init_f。
总结:初始化c语言环境,以便调用board_init_f函数。这个环境只提供了一个堆栈和一个存储GD(全局数据)结构的地方,两者都位于一些可用的RAM中。在调用board_init_f()之前,GD应该被归零。
继续分析board_init_f:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | void board_init_f(ulong boot_flags)
{
gd->flags = boot_flags;
gd->have_console = 0;
if (initcall_run_list(init_sequence_f))
hang();
#if !defined(CONFIG_ARM) && !defined(CONFIG_SANDBOX) && \
!defined(CONFIG_EFI_APP) && !CONFIG_IS_ENABLED(X86_64) && \
!defined(CONFIG_ARC)
/* NOTREACHED - jump_to_copy() does not return */
hang();
#endif
}
|
第3行,设置dg的标志为0,boot_flags是board_init_f函数调用前r0的值(0x0)。
第4行,标记dg的have_console为0,表示我们还没有初始化串口。
第6行,调用initcall_run_list()初始化uboot的前半段。
接着我们分析一下initcall_run_list。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 | DECLARE_GLOBAL_DATA_PTR;
static inline int initcall_run_list(const init_fnc_t init_sequence[])
{
const init_fnc_t *init_fnc_ptr; /* 定义函数指针 */
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
unsigned long reloc_ofs = 0;
int ret;
if (gd->flags & GD_FLG_RELOC)
reloc_ofs = gd->reloc_off;
#ifdef CONFIG_EFI_APP /* 没有定义,忽略 */
reloc_ofs = (unsigned long)image_base;
#endif
debug("initcall: %p", (char *)*init_fnc_ptr - reloc_ofs);
if (gd->flags & GD_FLG_RELOC)
debug(" (relocated to %p)\n", (char *)*init_fnc_ptr);
else
debug("\n");
ret = (*init_fnc_ptr)();
if (ret) {
printf("initcall sequence %p failed at call %p (err=%d)\n",
init_sequence,
(char *)*init_fnc_ptr - reloc_ofs, ret);
return -1;
}
}
return 0;
}
|
第1行,和前面我们讲的DECLARE_GLOBAL_DATA_PTR定义gd一样,要想用gd先定义。
第7行,遍历执行函数指针数组init_sequence[]里面放的所有函数。
第21行,取出函数指针数组init_sequence[]里面函数,一个一个地执行,并测试其返回值。
然后你是否会对函数指针数组init_sequence[]比较感兴趣,反正我是迫不及待地想看看其庐山真面目,那么我们就一起 点进去逛逛吧!init_sequence_f[]比较长,为了方便阅读,我们把不符合条件编译的代码段忽略了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 | static const init_fnc_t init_sequence_f[] = {
setup_mon_len, /* 设置gd->mon_len为编译出来的u-boot.bin+bss段的大小 */
fdtdec_setup, /* 和设备树有关 */
initf_malloc, /* 初始化并设置内存池 */
log_init, /* log初始化 */
initf_bootstage, /* 用于记录board_init_f()的引导阶段 */
setup_spl_handoff,
initf_console_record, /* 平台信息记录初始化 */
arch_cpu_init, /* 空函数 */
mach_cpu_init, /* 空函数 */
initf_dm, /* 驱动模型初始化 */
arch_cpu_init_dm, /* 空函数 */
board_early_init_f, /* 设置时钟和GPIO */
timer_init, /* 定时器初始化 */
env_init, /* 找到最适合存放环境变量的地址,并初始化 */
init_baud_rate, /* 波特率初始化 */
serial_init, /* 串口初始化 */
console_init_f, /* 使能在重定位之前用的串口功能 gd->have_console = 1 */
display_options, /* 显示banner,如u-boot版本、编译时间等信息 */
display_text_info, /* 显示调试信息 */
print_cpuinfo, /* 显示cpu信息,如cpu速度 */
show_board_info, /* 显示板子信息 */
announce_dram_init, /* 准备显示DRAM大小,在u-boot启动时可以看到DRAM大小的信息 */
dram_init, /* DRAM初始化,对于本imx6ull设置dg->ram_size = 512 MiB */
setup_dest_addr, /* 设置重定位地址,gd->relocaddr = gd->ram_top */
reserve_round_4k, /* 4字节对齐,将内存指针调到下一个4 kB */
reserve_mmu, /* 为mmu区域腾出空间 */
reserve_video, /* 预留video显示内存 */
reserve_trace,
reserve_uboot, /* 预留U-Boot代码、data和bss区 */
reserve_malloc, /* 预留malloc区 */
reserve_board, /* 预留存放板子信息区 */
setup_machine, /* 板子ID,这里没有用到 */
reserve_global_data, /* 预留GD区域,栈gd->start_addr_sp指向gd段基地址*/
reserve_fdt, /* 预留设备树区域 */
reserve_bootstage,
reserve_bloblist,
reserve_arch, /* 架构相关预留区 */
reserve_stacks, /* 预留栈区,gd->start_addr_sp指向栈底基地址 */
dram_init_banksize, /* DRAM的大小初始化 */
show_dram_config, /* 显示DRAM的配置 */
display_new_sp, /* 显示新的栈地址 */
reloc_fdt, /* 和设备树有关 */
reloc_bootstage, /* 和u-boot阶段有关 */
reloc_bloblist, /* 和blob列表有关 */
setup_reloc, /* 重定位 */
NULL,
};
|
上面函数指针数组init_sequence[]里面的函数都和大家梳理了一遍,花了我好大一会功夫。 但是光知道函数名字还不透彻,下面我们就init_sequence[],大致介绍一下某些重要函数在内存中究竟做了什么?
起初我们的gd成员如下图所示:
setup_mon_len函数比较简单,它是根据.lds文件中__bss_end与__bss_end计算出u-boot本身的大,赋给gd->mon_len变量。
fdtdec_setup函数,检查gd->fdt_blob处是否存在dtb,我们来看下调试信息中gd->fdt_blob地址是否有存放设备树。
通过上图发现gd->fdt_blob确实指向了设备树相关信息处。
env_init函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 | int env_init(void)
{
struct env_driver *drv;
int ret = -ENOENT;
int prio;
for (prio = 0; (drv = env_driver_lookup(ENVOP_INIT, prio)); prio++) {
if (!drv->init || !(ret = drv->init()))
env_set_inited(drv->location);
debug("%s: Environment %s init done (ret=%d)\n", __func__,
drv->name, ret);
}
if (!prio)
return -ENODEV;
if (ret == -ENOENT) {
gd->env_addr = (ulong)&default_environment[0]; /* default_environment[0]用于存放默认环境变量的数组 */
gd->env_valid = ENV_VALID; /* ENV_VALID = 1 标志环境有效 */
return 0;
}
return ret;
}
|
第9行,标记已经初始化环境变量。
第19行,default_environment[]数组存放着默认的环境变量,此段代码的意思是将默认环境变量default_environment的地址赋值给全局变量gd->env_addr,该数组在include/env_default.h文件中有如下定义:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 | const uchar default_environment[] = {
#endif
#ifndef CONFIG_USE_DEFAULT_ENV_FILE
#ifdef CONFIG_ENV_CALLBACK_LIST_DEFAULT
ENV_CALLBACK_VAR "=" CONFIG_ENV_CALLBACK_LIST_DEFAULT "\0"
#endif
#ifdef CONFIG_ENV_FLAGS_LIST_DEFAULT
ENV_FLAGS_VAR "=" CONFIG_ENV_FLAGS_LIST_DEFAULT "\0"
#endif
#ifdef CONFIG_USE_BOOTARGS
"bootargs=" CONFIG_BOOTARGS "\0"
#endif
#ifdef CONFIG_BOOTCOMMAND
"bootcmd=" CONFIG_BOOTCOMMAND "\0"
#endif
#ifdef CONFIG_RAMBOOTCOMMAND
"ramboot=" CONFIG_RAMBOOTCOMMAND "\0"
#endif
#ifdef CONFIG_NFSBOOTCOMMAND
"nfsboot=" CONFIG_NFSBOOTCOMMAND "\0"
#endif
#if defined(CONFIG_BOOTDELAY)
"bootdelay=" __stringify(CONFIG_BOOTDELAY) "\0"
#endif
#if defined(CONFIG_BAUDRATE) && (CONFIG_BAUDRATE >= 0)
"baudrate=" __stringify(CONFIG_BAUDRATE) "\0"
#endif
#ifdef CONFIG_LOADS_ECHO
"loads_echo=" __stringify(CONFIG_LOADS_ECHO) "\0"
#endif
#ifdef CONFIG_ETHPRIME
"ethprime=" CONFIG_ETHPRIME "\0"
#endif
#ifdef CONFIG_IPADDR
"ipaddr=" __stringify(CONFIG_IPADDR) "\0"
#endif
#ifdef CONFIG_SERVERIP
"serverip=" __stringify(CONFIG_SERVERIP) "\0"
#endif
#ifdef CONFIG_SYS_AUTOLOAD
"autoload=" CONFIG_SYS_AUTOLOAD "\0"
#endif
#ifdef CONFIG_PREBOOT
"preboot=" CONFIG_PREBOOT "\0"
#endif
#ifdef CONFIG_ROOTPATH
"rootpath=" CONFIG_ROOTPATH "\0"
#endif
#ifdef CONFIG_GATEWAYIP
"gatewayip=" __stringify(CONFIG_GATEWAYIP) "\0"
#endif
#ifdef CONFIG_NETMASK
"netmask=" __stringify(CONFIG_NETMASK) "\0"
#endif
#ifdef CONFIG_HOSTNAME
"hostname=" CONFIG_HOSTNAME "\0"
#endif
#ifdef CONFIG_BOOTFILE
"bootfile=" CONFIG_BOOTFILE "\0"
#endif
#ifdef CONFIG_LOADADDR
"loadaddr=" __stringify(CONFIG_LOADADDR) "\0"
#endif
#ifdef CONFIG_CLOCKS_IN_MHZ
"clocks_in_mhz=1\0"
#endif
#if defined(CONFIG_PCI_BOOTDELAY) && (CONFIG_PCI_BOOTDELAY > 0)
"pcidelay=" __stringify(CONFIG_PCI_BOOTDELAY)"\0"
#endif
#ifdef CONFIG_ENV_VARS_UBOOT_CONFIG
"arch=" CONFIG_SYS_ARCH "\0"
#ifdef CONFIG_SYS_CPU
"cpu=" CONFIG_SYS_CPU "\0"
#endif
#ifdef CONFIG_SYS_BOARD
"board=" CONFIG_SYS_BOARD "\0"
"board_name=" CONFIG_SYS_BOARD "\0"
#endif
#ifdef CONFIG_SYS_VENDOR
"vendor=" CONFIG_SYS_VENDOR "\0"
#endif
#ifdef CONFIG_SYS_SOC
"soc=" CONFIG_SYS_SOC "\0"
#endif
#endif
#if defined(CONFIG_BOOTCOUNT_BOOTLIMIT) && (CONFIG_BOOTCOUNT_BOOTLIMIT > 0)
"bootlimit=" __stringify(CONFIG_BOOTCOUNT_BOOTLIMIT)"\0"
#endif
#ifdef CONFIG_EXTRA_ENV_SETTINGS
CONFIG_EXTRA_ENV_SETTINGS
#endif
"\0"
#else /* CONFIG_USE_DEFAULT_ENV_FILE */
#include "generated/defaultenv_autogenerated.h"
#endif
#ifdef DEFAULT_ENV_INSTANCE_EMBEDDED
}
|
比如默认环境变量可以根据宏定义去配置默认的环境变量,如bootargs、bootcmd、bootdelay等, bootdelay对应的宏CONFIG_BOOTDELAY在include/generated/autoconf.h文件中可以设置,修改该宏 便可以设置默认的u-boot延时时间。在imx6ull EVK pro中并没用使用默认的环境变量,而是使用的 configs/mx6ull_npi_defconfig配置文件中的环境变量,修改该配置文件中的CONFIG_BOOTDELAY=5,编译 运行,则可以看到u-boot的启动检测输入延时为5秒,如下图所示:
其中宏CONFIG_EXTRA_ENV_SETTINGS包含了我们include/configs/npi_common.h文件中的大多数环境变量,也包含fire-config中的/boot/uEnv.txt配置文件。
第20行,标记环境变量有效,gd->env_valid = ENV_VALID = 1。
init_baud_rate函数:
1 2 3 4 5 | static int init_baud_rate(void)
{
gd->baudrate = env_get_ulong("baudrate", 10, CONFIG_BAUDRATE); /* CONFIG_BAUDRATE = 115200 设置波特率*/
return 0;
}
|
1. 第3行,调用env_get_ulong函数获取环境变量中波特率的参数,env_get_ulong函数通过第一个参数”baudrate”来匹配 默认环境变量中的”baudrate”,其实就是匹配数组default_environment[]中的波特率,第二个参数表示按照十进制基数获取,如果没有匹配到,就会采用第三个参数的值作为默认波特率。
serial_init函数:
1 2 3 4 5 | int serial_init(void)
{
gd->flags |= GD_FLG_SERIAL_READY; /* GD_FLG_SERIAL_READY = 0x00100 标志串口就绪 */
return get_current()->start();
}
|
第3行,设置gd->flags,表示串口已经准备好了。
第4行,get_current()->start()返回一个指向当前被选择的串口的指针,我们来分析一下get_current函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | static struct serial_device *get_current(void)
{
struct serial_device *dev;
if (!(gd->flags & GD_FLG_RELOC))
dev = default_serial_console();
else if (!serial_current)
dev = default_serial_console();
else
dev = serial_current;
/* We must have a console device */
if (!dev) {
#ifdef CONFIG_SPL_BUILD
puts("Cannot find console\n");
hang();
#else
panic("Cannot find console\n");
#endif
}
return dev;
}
|