
15. SPI接口 回环测试¶
鲁班猫扩展板板载1个SPI接口:
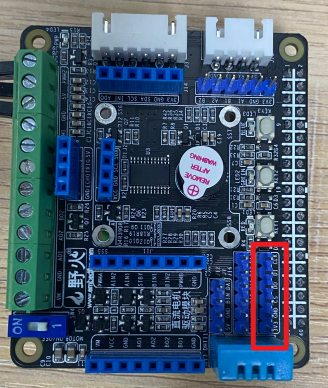
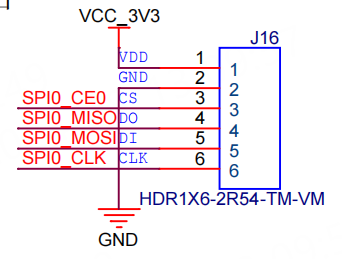
SPI接口对应扩展板SPI0,部分原理图如下:
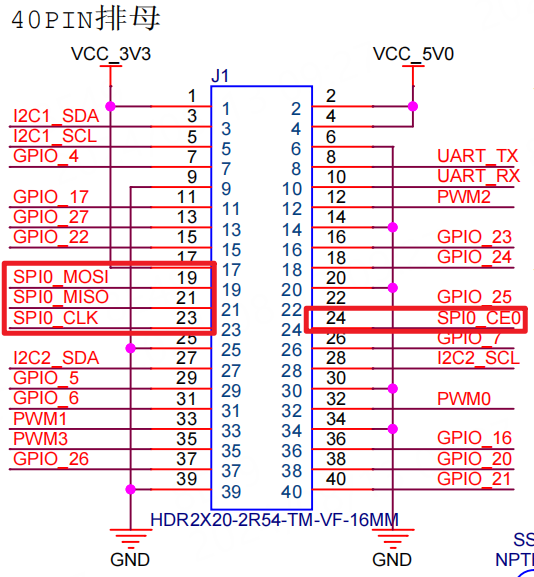
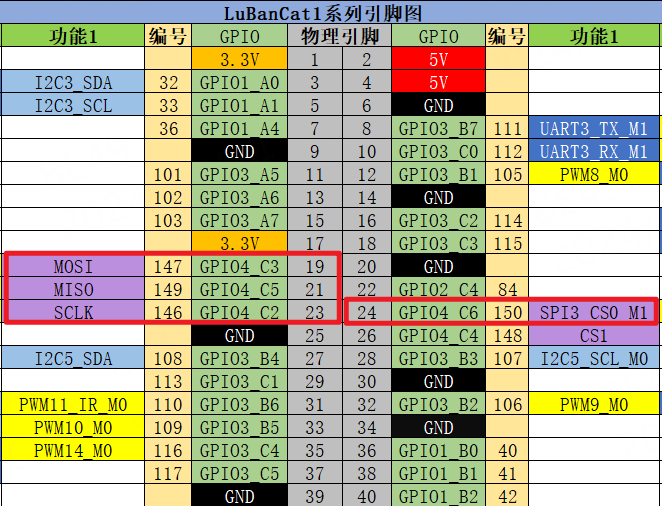
以鲁班猫1为例,扩展板的SPI0对应鲁班猫的SPI3_M1,执行如下命令修改/boot/uEnv/uEnv.txt,开启相应插件:
1 | sudo vi /boot/uEnv/uEnv.txt
|
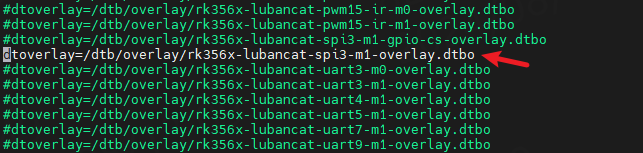
开启插件后,重启开发板。
15.1. python代码测试¶
python测试代码为:lubancat_rk_code_storage/expansion_board/spi/loop/spi_loop.py
测试前需要将spi_loop.py的spi接口修改为实际的接口:
1 2 3 4 5 6 7 8 9 10 | '''
filename : spi_loop.py
'''
...
# 申请SPI资源,打开 spidev3.0 控制器,配置SPI主机为工作模式0、工作速率为1MHz
spi = SPI("/dev/spidev3.0", 0, 1000000)
...
|
将spi_loop.py传到板卡,执行以下命令运行程序:
1 2 | # 运行程序
sudo python spi_loop.py
|
使用杜邦线将MISO和MOSI短接起来,进行回环测试:

15.2. c代码测试¶
C测试代码为:lubancat_rk_code_storage/expansion_board/spi/loop/spi_loop.c
将spi_loop.c传到板卡,执行以下命令运行程序:
1 2 3 4 5 | # 编译程序
sudo gcc -o spi_loop spi_loop.c
# 输入参数需修改为实际的spi接口
sudo ./spi_loop /dev/spidev3.0
|
使用杜邦线将MISO和MOSI短接起来,进行回环测试:
