6. 任务时间片运行¶
本章在上一章的基础上,加入SysTick中断,在SysTick中断服务函数里面进行任务切换,从而实现双任务的时间片运行,即每个任务运行的时间都是一样的。
6.1. SysTick简介¶
RTOS需要一个时基来驱动,系统任务调度的频率等于该时基的频率。通常该时基由一个定时器来提供,也可以从其他周期性的信号源获得。 刚好Cortex-M内核中有一个系统定时器SysTick,它内嵌在NVIC中,是一个24位的递减的计数器,计数器每计数一次的时间为1/SYSCLK。 当重装载数值寄存器的值递减到0的时候,系统定时器就产生一次中断,以此循环往复。因为SysTick是嵌套在内核中的, 所以使得OS在Cortex-M器件中编写的定时器代码不必修改,使移植工作一下子变得简单很多。所以SysTick是最适合给操作系统提供时基, 用于维护系统心跳的定时器。有关SysTick的寄存器汇总见表4‑1,各个寄存器的用法见表4‑2、表4‑3、表4‑4和表4‑5。
表4‑1SysTick寄存器汇总
寄存器名称 |
寄存器描述 |
|---|---|
CTRL |
SysTick控制及状态寄存器 |
LOAD |
SysTick重装载数值寄存器 |
VAL |
SysTick当前数值寄存器 |
表4‑2SysTick控制及状态寄存器
位段 |
名称 |
类型 |
复位值 |
描述 |
16 |
COUNTFLAG |
R/W |
0 |
如果在上次读取本寄存器后, SysTick 已经计到了 0,则该位为 1。 |
2 |
CLKSOURCE |
R/W |
0 |
时钟源选择位,0=AHB/8,1=处理器时钟AHB |
1 |
TICKINT |
R/W |
0 |
1=SysTick倒数计数到 0时产生 SysTick异常请求,0=数到 0 时无动作。也可以通过读取COUNTFLAG标志位来确定计数器是否递减到0 |
0 |
ENABLE |
R/W |
0 |
SysTick 定时器的启用位 |
表4‑3SysTick 重装载数值寄存器
位段 |
名称 |
类型 |
复位值 |
描述 |
|---|---|---|---|---|
23:0 |
RELOAD |
R/W |
0 |
当倒数计数至零时,将被重装载的值 |
表4‑4SysTick当前数值寄存器
位段 |
名称 |
类型 |
复位值 |
描述 |
23:0 |
CURRENT |
R/W |
0 |
读取时返回当前倒计数的值,写它则使之清零,同时还会清除在SysTick控制及状态寄存器中的COUNTFLAG 标志 |
6.2. 初始化SysTick¶
使用SysTick非常简单,只需一个初始化函数搞定,OS_CPU_SysTickInit函数在os_cpu_c.c中定义, 具体实现见 代码清单:时间片运行-1。 在这里,SysTick初始化函数我们没有使用μC/OS-III官方的,我们是自己另外编写了一个。区别是uC/OS-III官方的OS_CPU_SysTickInit函数里面涉及 SysTick寄存器都是重新在cpu.h中定义,而我们自己编写的则是使用ARMCM3.h(记得在os_cpu_c.c的开头包含ARMCM3.h这个头文件) 这个固件库文件里面定义的寄存器,仅此区别而已。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 | #if 0/* 不用μC/OS-III自带的 */
void OS_CPU_SysTickInit (CPU_INT32U cnts)
{
CPU_INT32U prio;
/* 填写 SysTick 的重载计数值 */
CPU_REG_NVIC_ST_RELOAD = cnts - 1u;
/* 设置 SysTick 中断优先级 */
prio = CPU_REG_NVIC_SHPRI3;
prio &= DEF_BIT_FIELD(24, 0);
prio |= DEF_BIT_MASK(OS_CPU_CFG_SYSTICK_PRIO, 24);
CPU_REG_NVIC_SHPRI3 = prio;
/* 启用 SysTick 的时钟源和启动计数器 */
CPU_REG_NVIC_ST_CTRL |= CPU_REG_NVIC_ST_CTRL_CLKSOURCE |
CPU_REG_NVIC_ST_CTRL_ENABLE;
/* 启用 SysTick 的定时中断 */
CPU_REG_NVIC_ST_CTRL |= CPU_REG_NVIC_ST_CTRL_TICKINT;
}
#else/* 直接使用头文件ARMCM3.h里面现有的寄存器定义和函数来实现 */
void OS_CPU_SysTickInit (CPU_INT32U ms)
{
/* 设置重装载寄存器的值 */
SysTick->LOAD = ms * SystemCoreClock / 1000 - 1;(1)
/* 配置中断优先级为最低 */
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);(2)
/* 复位当前计数器的值 */
SysTick->VAL = 0;(3)
/* 选择时钟源、启用中断、启用计数器 */
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |(4)
SysTick_CTRL_TICKINT_Msk |(5)
SysTick_CTRL_ENABLE_Msk;(6)
}
#endif
|
代码清单:时间片运行-1 (1):配置重装载寄存器的值,我们配合函数形参ms来配置,如果需要配置为10ms产生一次中断,形参设置为10即可。
代码清单:时间片运行-1 (2):配置SysTick的优先级,这里配置为15,即最低。
代码清单:时间片运行-1 (3):复位当前计数器的值。
代码清单:时间片运行-1 (4):选择时钟源,这里选择SystemCoreClock。
代码清单:时间片运行-1 (5):启用中断。
代码清单:时间片运行-1 (6):启用计数器开始计数。
6.3. 编写SysTick中断服务函数¶
SysTick中断服务函数也是在os_cpu_c.c中定义,具体实现见 代码清单:时间片运行-2。
1 2 3 4 5 | /* SysTick 中断服务函数 */
void SysTick_Handler(void)
{
OSTimeTick();
}
|
SysTick中断服务函数很简单,里面仅调用了函数OSTimeTick()。OSTimeTick()是与时间相关的函数, 在os_time.c(os_time.c第一次使用需要自行在文件夹μC/OS-IIISource中新建并添加到工程的μC/OS-IIISource组)文件中定义, 具体实现见 代码清单:时间片运行-3。
1 2 3 4 5 | void OSTimeTick (void)
{
/* 任务调度 */
OSSched();
}
|
OSTimeTick()很简单,里面仅调用了函数OSSched,OSSched函数暂时没有修改,与上一章一样,具体见 代码清单:时间片运行-4。
1 2 3 4 5 6 7 8 9 10 11 12 13 | void OSSched (void)
{
if ( OSTCBCurPtr == OSRdyList[0].HeadPtr )
{
OSTCBHighRdyPtr = OSRdyList[1].HeadPtr;
}
else
{
OSTCBHighRdyPtr = OSRdyList[0].HeadPtr;
}
OS_TASK_SW();
}
|
6.4. main()函数¶
main()函数与上一章区别不大,仅仅是加入了SysTick相关的内容,具体见 代码清单:时间片运行-5。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 | int main(void)
{
OS_ERR err;
/* 关闭中断 */
CPU_IntDis();(1)
/* 配置SysTick 10ms 中断一次 */
OS_CPU_SysTickInit (10);(2)
/* 初始化相关的全局变量 */
OSInit(&err);
/* 创建任务 */
OSTaskCreate ((OS_TCB*) &Task1TCB,
(OS_TASK_PTR ) Task1,
(void *) 0,
(CPU_STK*) &Task1Stk[0],
(CPU_STK_SIZE) TASK1_STK_SIZE,
(OS_ERR *) &err);
OSTaskCreate ((OS_TCB*) &Task2TCB,
(OS_TASK_PTR ) Task2,
(void *) 0,
(CPU_STK*) &Task2Stk[0],
(CPU_STK_SIZE) TASK2_STK_SIZE,
(OS_ERR *) &err);
/* 将任务加入到就绪列表 */
OSRdyList[0].HeadPtr = &Task1TCB;
OSRdyList[1].HeadPtr = &Task2TCB;
/* 启动OS,将不再返回 */
OSStart(&err);
}
/* 任务1 */
void Task1( void *p_arg )
{
for ( ;; ) {
flag1 = 1;
delay( 100 );
flag1 = 0;
delay( 100 );
/* 任务切换,这里是手动切换 */
//OSSched();(3)
}
}
/* 任务2 */
void Task2( void *p_arg )
{
for ( ;; ) {
flag2 = 1;
delay( 100 );
flag2 = 0;
delay( 100 );
/* 任务切换,这里是手动切换 */
//OSSched();(4)
}
}
|
代码清单:时间片运行-5 (1):关闭中断。因为在OS系统初始化之前我们启用了SysTick定时器产生10ms的中断,在中断里面触发任务调度, 如果一开始我们不关闭中断,就会在OS还有启动之前就进入SysTick中断,然后发生任务调度,既然OS都还没启动,那调度是不允许发生的, 所以先关闭中断。系统启动后,中断由OSStart()函数里面的OSStartHighRdy()重新开启。
代码清单:时间片运行-5 (2):配置SysTick为10ms中断一次。任务的调度是在SysTick的中断服务函数中完成的, 中断的频率越高就意味着OS的 调度越高,系统的负荷就越重,一直在不断的进入中断,则执行任务的时间就减小。 选择合适的SysTick中断频率会提供系统的运行效率,μC/OS-III 官方推荐为10ms,或者高点也行。
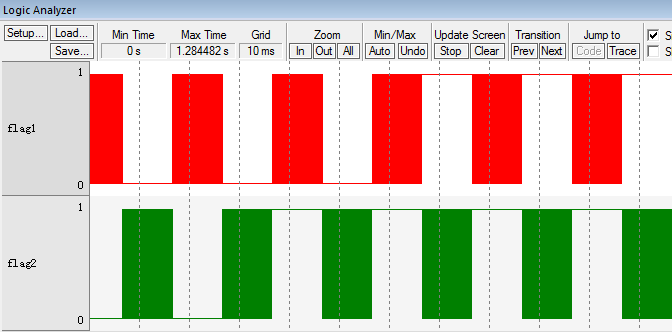
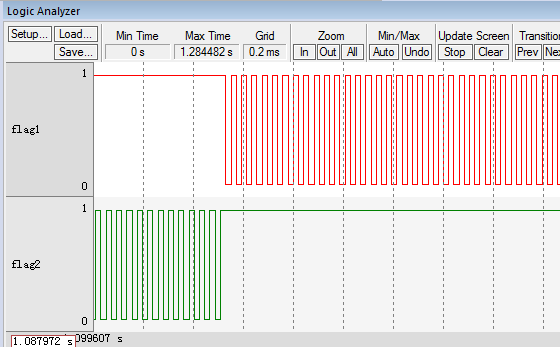
代码清单:时间片运行-5 (3)、(4):任务调度将不再在各自的任务里面实现,而是放到了SysTick中断服务函数中。 从而实现每个任务都运行相同的时间片,平等的享有CPU。