18. 无刷电机双环控制(BLDC)¶
通过前面章节的学习,我们已经大致了解六步换向方式下,无刷电机速度环、位置环等使用方法,由于六步换向方式生成的转矩并不平稳,所以力矩控制,也就是电流环的控制,实际效果不很符合预期,我们不做测试。 在实际应用中,往往需要同时对速度与位置进行精确的控制,所以这里我们介绍两环的串级PID控制例程。
18.1. 硬件设计¶
关于详细的硬件分析在直流无刷电机章节中已经讲解过,这里不再做分析, 如有不明白请参考前面章节,这里只给出接线表。
电机主控板与无刷电机驱动板连接见下表所示。
电机 |
无刷电机驱动板 |
|---|---|
粗黄 |
U |
粗绿 |
V |
粗蓝 |
W |
细红 |
+(编码器电源) |
细黑 |
-(编码器电源) |
细黄 |
HIU |
细绿 |
HIV |
细蓝 |
HIW |
无刷电机驱动板与主控板连接见下表所示。
无刷电机驱动板 |
主控板 |
|---|---|
5V_IN |
5V |
GND |
GND |
U+ |
PI5 |
U- |
PH13 |
V+ |
PI6 |
V- |
PH14 |
W+ |
PI7 |
W- |
PH15 |
HU |
PH10 |
HV |
PH11 |
HW |
PH12 |
SD |
PE6 |
推荐使用配套的牛角排线直接连接驱动板和主控板。连接开发板的那端,请连接在“无刷电机驱动接口2”上。
18.2. 直流电机速度环、位置环两环串级PID控制-位置式PID实现¶
18.2.1. 软件分析¶
18.2.1.1. 编程要点¶
配置基本定时器可以产生定时中断来执行PID运算
编写位置式PID算法
编写位置环、速度环控制函数
增加上位机曲线观察相关代码
编写按键控制代码
软件部分通过前面章节的两环整合来实现代码,将速度环、位置环的实现部分添加进新的工程,本章代码在野火电机驱动例程中\improve_part\F407\直流无刷刷电机-位置环速度环控制-位置式PID目录下,下面我们详细来看。
在串级PID控制中,最外环一般选择期望控制的参数的环节,例如对应速度快慢的速度环、位置的位置环,本代码的选择位置环作为最外环,位置作为控制量,期望控制电机实际位置。在主函数中,可以看出这点。
18.2.1.2. 主函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 | int32_t target_location = 2400;
/* 初始化系统时钟为168MHz */
SystemClock_Config();
/* HAL 库初始化 */
HAL_Init();
/* 初始化按键GPIO */
Key_GPIO_Config();
/* LED 灯初始化 */
LED_GPIO_Config();
/* 协议初始化 */
protocol_init();
/* 调试串口初始化 */
DEBUG_USART_Config();
PID_param_init();
/* 周期控制定时器 50ms */
TIMx_Configuration();
/* 电机初始化 */
bldcm_init();
/* 设置目标位置 */
set_pid_target(&pid_location, target_location);
#if defined(PID_ASSISTANT_EN)
set_computer_value(SEND_STOP_CMD, CURVES_CH1, NULL, 0); // 同步上位机的启动按钮状态
set_computer_value(SEND_TARGET_CMD, CURVES_CH1, &target_location, 1); // 给通道 1 发送目标值
#endif
while(1)
{
/* 接收数据处理 */
receiving_process();
/* 扫描KEY1 */
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
/* 使能电机 */
set_bldcm_enable();
#if defined(PID_ASSISTANT_EN)
set_computer_value(SEND_START_CMD, CURVES_CH1, NULL, 0); // 同步上位机的启动按钮状态
#endif
}
/* 扫描KEY2 */
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
/* 停止电机 */
set_bldcm_disable();
#if defined(PID_ASSISTANT_EN)
set_computer_value(SEND_STOP_CMD, CURVES_CH1, NULL, 0); // 同步上位机的启动按钮状态
#endif
}
/* 扫描KEY3 */
if( Key_Scan(KEY3_GPIO_PORT,KEY3_PIN) == KEY_ON )
{
/* 增大占空比 */
target_location += 12;
set_pid_target(&pid_location, target_location);
#if defined(PID_ASSISTANT_EN)
set_computer_value(SEND_TARGET_CMD, CURVES_CH1, &target_location, 1); // 给通道 1 发送目标值
#endif
}
/* 扫描KEY4 */
if( Key_Scan(KEY4_GPIO_PORT,KEY4_PIN) == KEY_ON )
{
target_location -= 12;
set_pid_target(&pid_location, target_location);
#if defined(PID_ASSISTANT_EN)
set_computer_value(SEND_TARGET_CMD, CURVES_CH1, &target_location, 1); // 给通道 1 发送目标值
#endif
}
/* 扫描KEY5 */
if( Key_Scan(KEY5_GPIO_PORT,KEY5_PIN) == KEY_ON )
{
target_location *= -1;
set_pid_target(&pid_location, target_location);
#if defined(PID_ASSISTANT_EN)
set_computer_value(SEND_TARGET_CMD, CURVES_CH1, &target_location, 1); // 给通道 1 发送目标值
#endif
}
}
}
|
主函数中,做了外设初始化的相关操作。此外还通过target_location这一变量, 设定了目标位置,即实际中电机需要转动达到的位置,通过前面位置环的学习,可以知道这一变量被赋值为宏PER_CYCLE_PULSES,意味着电机目标位置为转动一圈后达到的位置。剩余操作与前面章节一致,通过按键控制电机,略过不讲,下面看PID参数的初始化和整定的一些说明。
18.2.1.3. PID参数初始化、整定说明¶
与前面章节不同的是,由于引入了两环环控制(位置环、速度环、电流环),所以在PID初始化时,对应的有两套PID参数。具体看代码。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 | //定义全局变量
_pid pid_location;
_pid pid_speed;
/**
* @brief PID参数初始化
* @note 无
* @retval 无
*/
void PID_param_init()
{
/* 位置相关初始化参数 */
pid_location.target_val=0.0;
pid_location.actual_val=0.0;
pid_location.err=0.0;
pid_location.err_last=0.0;
pid_location.integral=0.0;
pid_location.Kp = 124;
pid_location.Ki = 0;
pid_location.Kd = 90;
/* 速度相关初始化参数 */
pid_speed.target_val=0.0;
pid_speed.actual_val=0.0;
pid_speed.err=0.0;
pid_speed.err_last=0.0;
pid_speed.integral=0.0;
pid_speed.Kp = 0.35;
pid_speed.Ki = 0.18;
pid_speed.Kd = 0.01;
#if defined(PID_ASSISTANT_EN)
float pid_temp[3] = {pid_location.Kp, pid_location.Ki, pid_location.Kd};
set_computer_value(SEND_P_I_D_CMD, CURVES_CH1, pid_temp, 3); // 给通道 1 发送 P I D 值
pid_temp[0] = pid_speed.Kp;
pid_temp[1] = pid_speed.Ki;
pid_temp[2] = pid_speed.Kd;
set_computer_value(SEND_P_I_D_CMD, CURVES_CH2, pid_temp, 3); // 给通道 2 发送 P I D 值
#endif
}
|
从代码中,可以看到两套PID参数配置结构体,它们分别是位置环、速度环的PID参数配置。这三套配置,需要我们从内环到外环依次的调参。以本章工程为例,本章工程是位置环作为外环,速度环作为内环,所以进行PID调参时,从速度环开始调参。调参时参考《PID控制器参数整定》章节的方法进行PID的整定。
18.2.1.4. 位置环、速度环控制函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | #define BASIC_TIM TIM6
#define BASIC_TIM_CLK_ENABLE() __TIM6_CLK_ENABLE()
#define BASIC_TIM_IRQn TIM6_DAC_IRQn
#define BASIC_TIM_IRQHandler TIM6_DAC_IRQHandler
/* 累计 TIM_Period个后产生一个更新或者中断*/
//当定时器从0计数到BASIC_PERIOD_COUNT-1,即为BASIC_PERIOD_COUNT次,为一个定时周期
#define BASIC_PERIOD_COUNT (50*20)
//定时器时钟源TIMxCLK = 2 * PCLK1
// PCLK1 = HCLK / 4
// => TIMxCLK=HCLK/2=SystemCoreClock/2=84MHz
#define BASIC_PRESCALER_COUNT (1680)
/* 获取定时器的周期,单位ms */
//#define __HAL_TIM_GET_PRESCALER(__HANDLE__) ((__HANDLE__)->Instance->PSC) // Get TIM Prescaler.
//#define GET_BASIC_TIM_PERIOD(__HANDLE__) (1.0/(HAL_RCC_GetPCLK2Freq()/(__HAL_TIM_GET_PRESCALER(__HANDLE__)+1)/(__HAL_TIM_GET_AUTORELOAD(__HANDLE__)+1))*1000)
/* 以下两宏仅适用于定时器时钟源TIMxCLK=84MHz,预分频器为:1680-1 的情况 */
#define SET_BASIC_TIM_PERIOD(T) __HAL_TIM_SET_AUTORELOAD(&TIM_TimeBaseStructure, (T)*50 - 1) // 设置定时器的周期(1~1000ms)
#define GET_BASIC_TIM_PERIOD() ((__HAL_TIM_GET_AUTORELOAD(&TIM_TimeBaseStructure)+1)/50.0) // 获取定时器的周期,单位ms
|
这里封装了定时器的一些相关的宏,使用宏定义非常方便程序升级、移植。使用SET_BASIC_TIM_PERIOD(T)这个宏可以设置定时器的周期, 这样可以通过按键或者上位机来设置这个定时器的中断周期,使用GET_BASIC_TIM_PERIOD()这个宏可以得到定时器的当前周期, 不过使用的两个宏是有要求的,需要定时器时钟源的频率是84MHz,且预分频系数为1680。 如果更换定时器和修改预分频器则需要重新计算这个宏里面的参数.我们来看一下当前宏中周期的计算:84000000/1680/20 = 2500, 84000000为时钟源的频率,1680为预分频系数,50为自动重装载值,1000为定时器产生更新中断的频率, 当定时器以(84000000/1680)Hz的频率计数到50时刚好是1ms,所以只要设置自动重装载值为50的n倍减一时, 就可以得到n毫秒的更新中断,注意n是1到1000的正整数。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 | /**
* @brief 电机位置式 PID 控制实现(定时调用)
* @param 无
* @retval 无
*/
void bldcm_pid_control(void)
{
int32_t location_actual = get_motor_location(); // 电机旋转的当前位置
if (bldcm_data.is_enable)
{
float cont_val = 0; // 当前控制值
cont_val = location_pid_realize(&pid_location, location_actual); // 进行 PID 计算
/* 目标速度上限处理 */
if (cont_val > TARGET_SPEED_MAX)
{
cont_val = TARGET_SPEED_MAX;
}
else if (cont_val < -TARGET_SPEED_MAX)
{
cont_val = -TARGET_SPEED_MAX;
}
set_pid_target(&pid_speed, cont_val); // 设定位置的目标值
#if defined(PID_ASSISTANT_EN)
int32_t temp = cont_val;
set_computer_value(SEND_TARGET_CMD, CURVES_CH2, &temp, 1); // 给通道 2 发送目标值
#endif
int32_t actual_speed = get_motor_speed();
cont_val = speed_pid_realize(&pid_speed, actual_speed); // 进行 PID 计算
if (cont_val < 0)
{
cont_val = -cont_val;
bldcm_data.direction = MOTOR_REV;
}
else
{
bldcm_data.direction = MOTOR_FWD;
}
cont_val = (cont_val > PWM_PERIOD_COUNT) ? PWM_PERIOD_COUNT : cont_val; // 上限处理
set_bldcm_speed(cont_val);
#if defined(PID_ASSISTANT_EN)
set_computer_value(SEND_FACT_CMD, CURVES_CH2, &actual_speed, 1); // 给通道 2 发送实际值
set_computer_value(SEND_FACT_CMD, CURVES_CH1, &location_actual, 1); // 给通道 1 发送实际值
#else
printf("实际值:%d, 目标值: %.0f,控制值: %.0f\n", location_actual, get_pid_target(), cont_val);
#endif
}
}
|
代码的整体实现逻辑,是位置环作为两环控制的外环,它的PID输出作为速度环的输入,以达到两环控制的目的。增加了速度环,即增加了对速度控制的期望,将速度也纳入到了控制的环节中,这样一方面降低了干扰,另一方可以对速度进行跟随,防止超调。
从代码中可以看到,内环控制的周期与外环周期一致。
在实际应用中,还是根据实际的场景设定内外环控制周期。控制的最终效果,还是要让内环跟随外环的变化趋势最终达到稳定效果。
1 | #define TARGET_SPEED_MAX 1500 // 目标速度的最大值 r/m
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | float location_pid_realize(_pid *pid, float actual_val)
{
/*计算目标值与实际值的误差*/
pid->err=pid->target_val-actual_val;
pid->integral += pid->err; // 误差累积
/*PID算法实现*/
pid->actual_val = pid->Kp*pid->err+pid->Ki*pid->integral+pid->Kd*(pid->err-pid->err_last);
/*误差传递*/
pid->err_last=pid->err;
/*返回当前实际值*/
return pid->actual_val;
}
|
这里没有对位置环进行死区处理,因为六步换向方式下,每转一个信号都是固定的30°圆周角。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | float speed_pid_realize(_pid *pid, float actual_val)
{
/*计算目标值与实际值的误差*/
pid->err=pid->target_val-actual_val;
// if((pid->err<0.2f )&& (pid->err>-0.2f))
// pid->err = 0.0f;
pid->integral += pid->err; // 误差累积
/*PID算法实现*/
pid->actual_val = pid->Kp*pid->err+pid->Ki*pid->integral+pid->Kd*(pid->err-pid->err_last);
/*误差传递*/
pid->err_last=pid->err;
/*返回当前实际值*/
return pid->actual_val;
}
|
18.2.2. 下载验证¶
下载程序到电机开发板,我们按下Key1键启动电机(看主函数),也可以通过上位机给PID算法输入目标值启动,开发板就能实时的通过PID运算并控制输出,见下图。
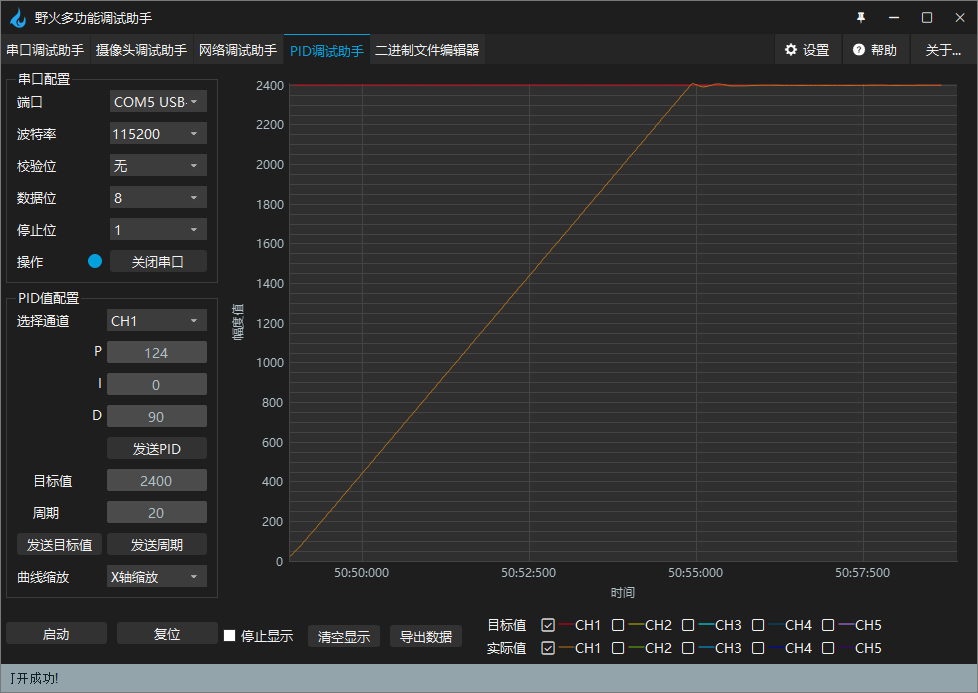
可以看到,电机按照设定的位置进行了转动。
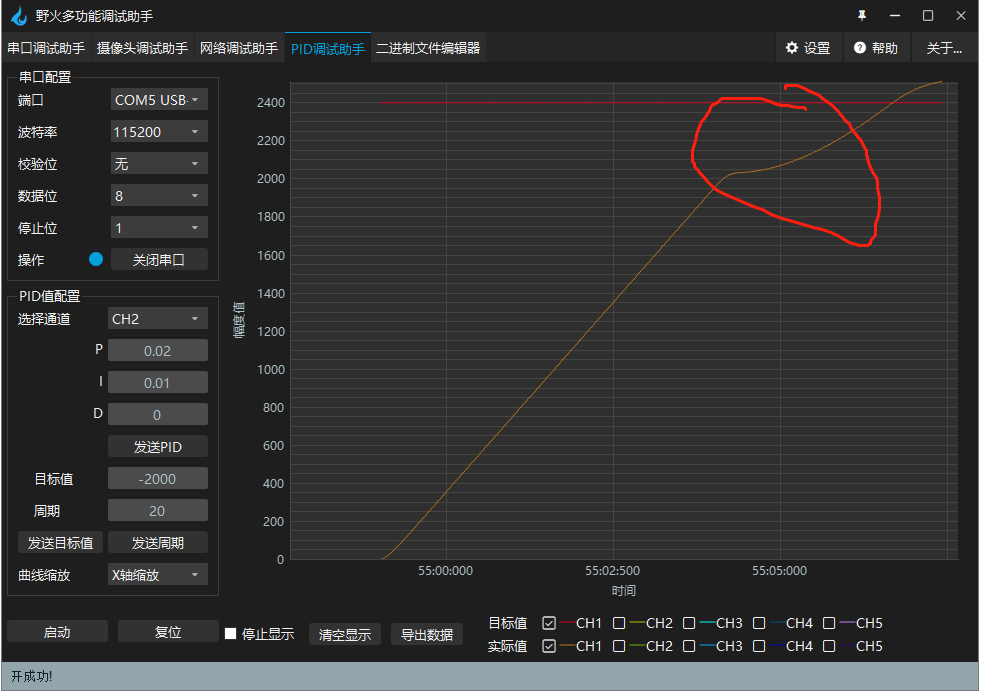
在调试过程中,我们可以发现,电机实际的转动效果,跟随了速度环的PID曲线,说明两环调节中的各环都需要合理整定。可以预想,要是速度环是震荡调节的,那么震荡的效果必然会叠加到最终的控制效果中。理解了这点,运用中,想要电机按照怎样的速度,怎样的电流去达到指定位置,就可以通过整定速度环、电流环的PID参数来实现了。例如想要电机以缓慢的速度到达指定位置,那么速度环的PID曲线必然是缓慢上升的,稍微调整速度环参数即可看到变化,如下图。
注意
注意:电机正在运行时应该先停止电机再复位,而不建议直接复位开发板,因为这属于非正常操作,复位的瞬间电机还在继续运动,产生的反电动势有损坏硬件的风险。