5. 直流有刷驱动板电流电压采集¶
野火使用MOS管搭建的直流有刷驱动板做到了信号完全隔离,其他驱动板基本都只是使用光耦隔离了控制信号, 并没有对ADC采样电路进行隔离,野火不仅使用光耦对控制信号进行了隔离, 还使用AMC1200SDUBR隔离运放对ADC采样电路进行了隔离。
5.1. 电流采样电路¶
如下图所示是电流采样电路,在电机驱动电路中串入一个0.02Ω、2W的采样电阻,将电流信号转换成电压信号, 再经过隔离运放放大8倍后差分输出,使用普通运放将差分输出转换成单端输出给STM32的ADC采样通道。
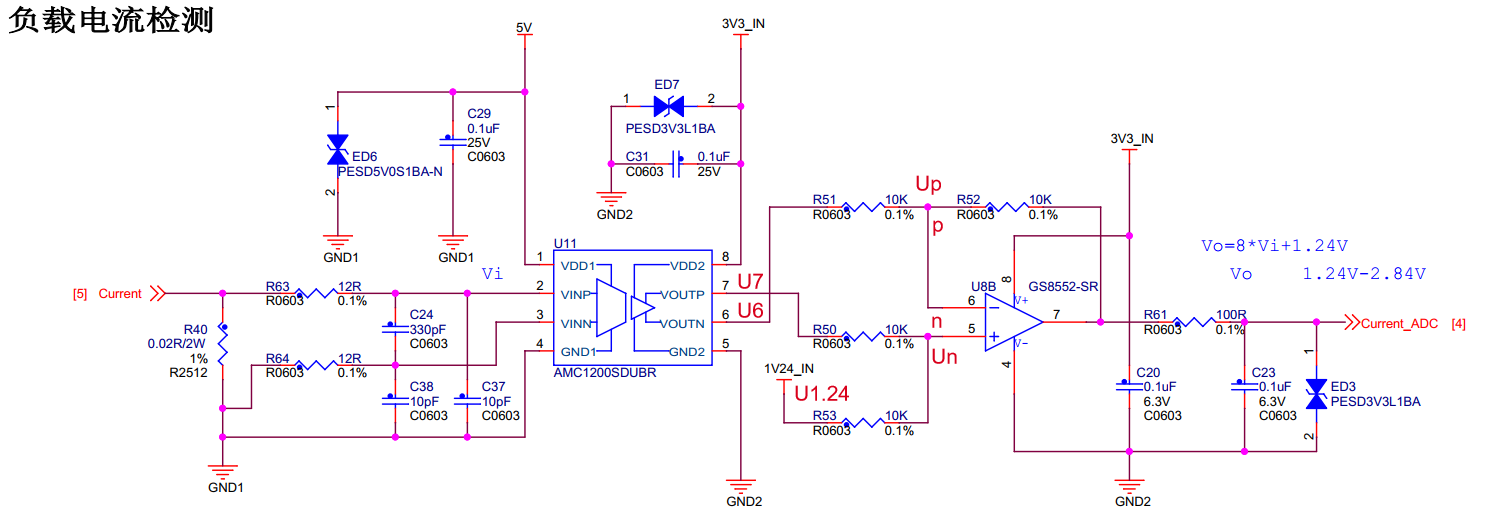
从上图中我们可以知道是一个负反馈电路,那么根据虚短和虚断可以知道Up=Un, p点和n点没有电流到运放的5脚和6脚,可以得:
R61与后面的电容组成RC滤波电路,R61上流过的电流很小,压降也小,可以忽略不计,Vo等于Vcurrent_adc。
将(1)式和(2)式整理可得:
因为Up=Un,所以有:

其中R52=R51=R53=R50=10KΩ, 将R52、R51、R53和R50阻值带入上式化简可得:
因为隔离运放将Vi放大8倍后输出,所以有U7-U6=8*Vi, 带入上式可得:
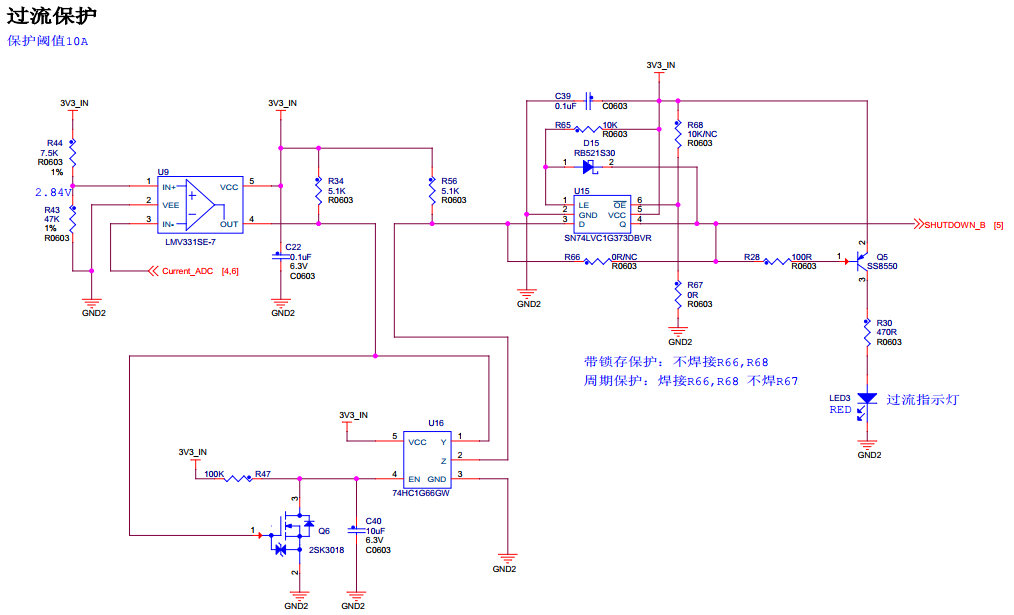
在下图中使用电压比较器LMV331SE实现10A过流保护电路,电流采样电路中Vi经过隔离运放和普通运放后变成Vcurrent_adc输入到下图比较器的IN-, 当IN-的电压超过IN+时,比较器的OUT将输出低电平到74HC1G66GW(模拟开关)的Y端口和左下端的NPN型MOS管中。当OUT将输出低电平时,NPN-MOS截止,此时3V3电压会供给74HC1G66GW,让其使能,这样模拟开关就会闭合,74HC1G66GW的Y端口与Z端口相当于连接在一起,低电平信号从Z端口,输出到下一级锁存器SN74LVC1G373DBVR,锁存器对输入信号进行锁存并输出到与门。
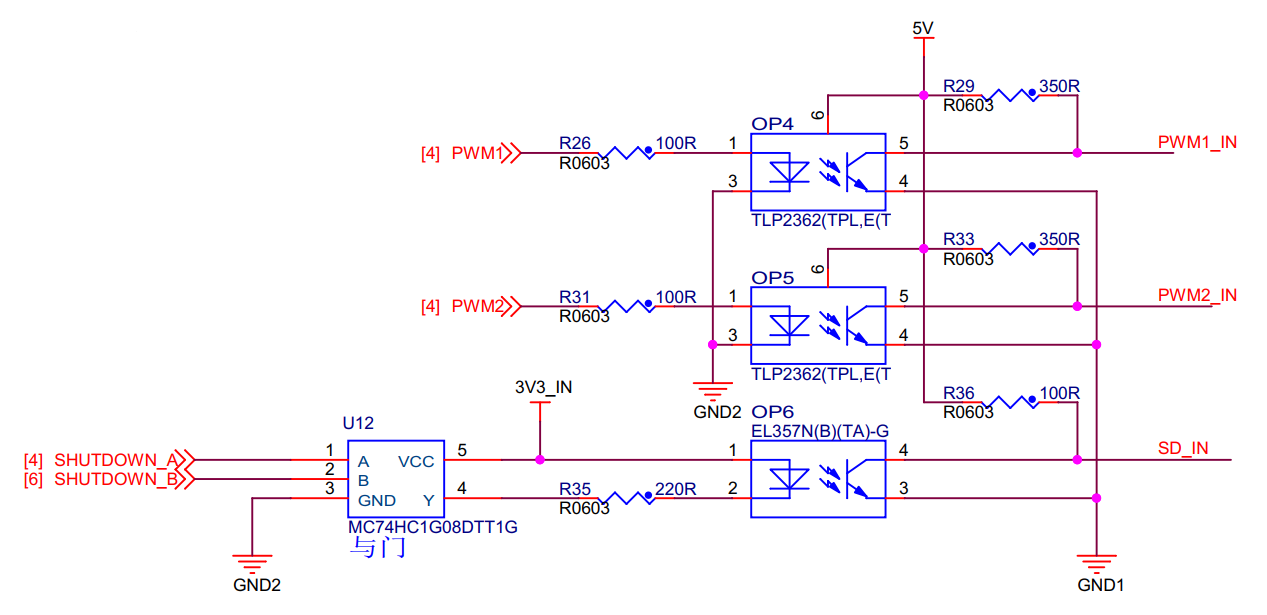
光耦隔离部分电路图如下图所示。
与门输入输出与MOS管状态真值表如下表所示。
A |
B |
Y |
MOS |
|---|---|---|---|
H |
H |
H |
可导通 |
H |
L |
L |
关断(过流保护) |
L |
H |
L |
关断(单片机控制关断) |
L |
L |
L |
关断(单片机控制关断,过流保护) |
5.2. 电压采样电路¶
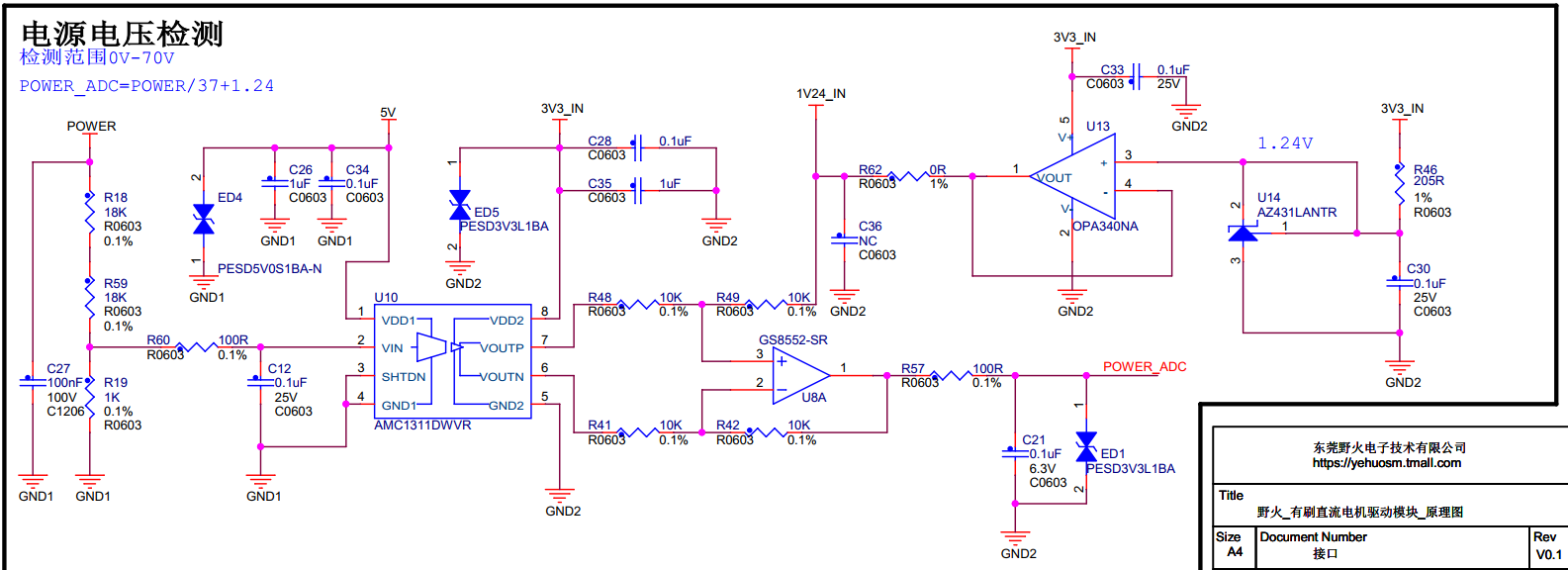
如下图所示是电源电压采样电路,在电源电压上并联R18和R19、R59的串联电阻,R19两端的电压作为隔离运放的输入, 再经过隔离器件后差分输出,使用普通运放将差分输出转换成单端输出,连接到STM32的ADC采样通道。 隔离运放的输入电压为Vi,则有:Vi/R19=POWER/(R18+R59+R19),带入电阻值可得:Vi=POWER/37, 通过上一节中电流采样电流的计算方法可以计算得到POWER_ADC=POWER/37+1.24,不同的是,电压检测部分的隔离器件是没有进行放大的。
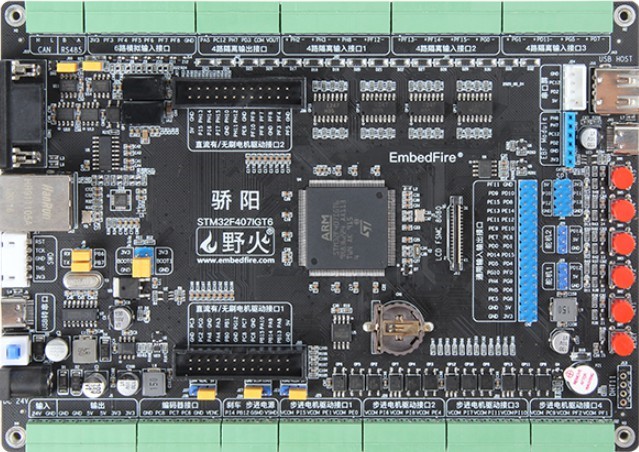
5.3. 硬件连接¶
本章实验需要连接开发板和驱动板,这里给出接线表。
5.4. 在STM32中实现电流电压采集¶
从第一节电流采样电路中,我们可以知道,想要对电流进行采集,需要将电流信号转换为电压信号。我们通过硬件部分完成了对该信号转换、放大处理,这样一来就可以很方便的在STM32使用ADC外设对该信号进行采集。在STM32中采集到了数据,最终再通过的一些数据的处理,我们就可以得到所需的电流值。当然同理可得,我对电压信号的采集也是类似地,下面我们看代码如何进行这部分的处理。
5.4.1. 软件设计¶
配套代码在下面目录中可以找到:
basis_part\F407\直流有刷减速电机-电流电压读取-MOS管搭建板
5.4.1.1. 编程要点¶
初始化ADC并使用DMA进行数据的获取
编写函数对采集得到的数据进行处理
编写获取最终电流值的函数
测试代码
5.4.2. 软件分析¶
时钟等其他相关的初始化与前面工程相同,这里不过多赘述,我们直接看ADC初始化的代码,看ADC初始化结构体各个参数的配置,如果对ADC配置有疑问,请看《野火STM32库开发实战指南》,有针对ADC外设的细致讲解。
5.4.2.1. ADC初始化¶
5.4.2.1.1. ADC_Init()函数¶
1 2 3 4 5 6 7 8 9 10 11 | /**
* @brief 电流采集初始化
* @param 无
* @retval 无
*/
void ADC_Init(void)
{
ADC_GPIO_Config();
adc_dma_init();
ADC_Mode_Config();
}
|
在ADC_Init()函数中,我们对ADC采集涉及到的相关GPIO进行了初始化,对DMA获取数据进行了配置,也配置了ADC采集的模式,再具体看每一个函数的实现。
5.4.2.1.2. ADC_GPIO_Config()函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | /**
* @brief ADC 通道引脚初始化
* @param 无
* @retval 无
*/
static void ADC_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能 GPIO 时钟
CURR_ADC_GPIO_CLK_ENABLE();
VBUS_GPIO_CLK_ENABLE();
// 配置 IO
GPIO_InitStructure.Pin = CURR_ADC_GPIO_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_ANALOG;
GPIO_InitStructure.Pull = GPIO_NOPULL ; //不上拉不下拉
HAL_GPIO_Init(CURR_ADC_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.Pin = VBUS_GPIO_PIN;
HAL_GPIO_Init(VBUS_GPIO_PORT, &GPIO_InitStructure);
}
|
ADC_GPIO_Config()中的部分配置使用了宏定义,具体定义内容到工程中查看。
5.4.2.1.3. adc_dma_init()函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 | void adc_dma_init(void)
{
// ------------------DMA Init 结构体参数 初始化--------------------------
// ADC1使用DMA2,数据流0,通道0,这个是手册固定死的
// 开启DMA时钟
CURR_ADC_DMA_CLK_ENABLE();
// 数据传输通道
DMA_Init_Handle.Instance = CURR_ADC_DMA_STREAM;
// 数据传输方向为外设到存储器
DMA_Init_Handle.Init.Direction = DMA_PERIPH_TO_MEMORY;
// 外设寄存器只有一个,地址不用递增
DMA_Init_Handle.Init.PeriphInc = DMA_PINC_DISABLE;
// 存储器地址固定
DMA_Init_Handle.Init.MemInc = DMA_MINC_ENABLE;
// 外设数据大小为半字,即两个字节
DMA_Init_Handle.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
// 存储器数据大小也为半字,跟外设数据大小相同
DMA_Init_Handle.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
// 循环传输模式
DMA_Init_Handle.Init.Mode = DMA_CIRCULAR;
// DMA 传输通道优先级为高,当使用一个DMA通道时,优先级设置不影响
DMA_Init_Handle.Init.Priority = DMA_PRIORITY_HIGH;
// 禁止DMA FIFO ,使用直连模式
DMA_Init_Handle.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
// FIFO 大小,FIFO模式禁止时,这个不用配置
DMA_Init_Handle.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_HALFFULL;
DMA_Init_Handle.Init.MemBurst = DMA_MBURST_SINGLE;
DMA_Init_Handle.Init.PeriphBurst = DMA_PBURST_SINGLE;
// 选择 DMA 通道,通道存在于流中
DMA_Init_Handle.Init.Channel = CURR_ADC_DMA_CHANNEL;
//初始化DMA流,流相当于一个大的管道,管道里面有很多通道
HAL_DMA_Init(&DMA_Init_Handle);
__HAL_LINKDMA(&ADC_Handle,DMA_Handle,DMA_Init_Handle);
}
|
adc_dma_init()配置为半字传输,方向配置为从ADC外设搬运数据到内存中,最后初始化DMA。
5.4.2.1.4. ADC_Mode_Config()函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 | /**
* @brief ADC 和 DMA 初始化
* @param 无
* @retval 无
*/
static void ADC_Mode_Config(void)
{
// 开启ADC时钟
CURR_ADC_CLK_ENABLE();
// -------------------ADC Init 结构体 参数 初始化------------------------
// ADC1
ADC_Handle.Instance = CURR_ADC;
// 时钟为fpclk 4分频
ADC_Handle.Init.ClockPrescaler = ADC_CLOCKPRESCALER_PCLK_DIV4;
// ADC 分辨率
ADC_Handle.Init.Resolution = ADC_RESOLUTION_12B;
// 禁止扫描模式,多通道采集才需要
ADC_Handle.Init.ScanConvMode = ENABLE;
// 连续转换
ADC_Handle.Init.ContinuousConvMode = ENABLE;
// 非连续转换
ADC_Handle.Init.DiscontinuousConvMode = DISABLE;
// 非连续转换个数
ADC_Handle.Init.NbrOfDiscConversion = 0;
//禁止外部边沿触发
ADC_Handle.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
//使用软件触发
ADC_Handle.Init.ExternalTrigConv = ADC_SOFTWARE_START;
//数据左对齐
ADC_Handle.Init.DataAlign = ADC_DATAALIGN_LEFT;
//转换通道 2个
ADC_Handle.Init.NbrOfConversion = 2;
//使能连续转换请求
ADC_Handle.Init.DMAContinuousRequests = ENABLE;
//转换完成标志
ADC_Handle.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
// 初始化ADC
HAL_ADC_Init(&ADC_Handle);
//---------------------------------------------------------------------------
ADC_ChannelConfTypeDef ADC_Config;
ADC_Config.Channel = CURR_ADC_CHANNEL;
ADC_Config.Rank = 1;
// 采样时间间隔
ADC_Config.SamplingTime = ADC_SAMPLETIME_3CYCLES;
ADC_Config.Offset = 0;
// 配置 ADC 通道转换顺序为1,第一个转换,采样时间为3个时钟周期
HAL_ADC_ConfigChannel(&ADC_Handle, &ADC_Config);
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
ADC_Config.Channel = VBUS_ADC_CHANNEL;
ADC_Config.Rank = 2;
// 采样时间间隔
ADC_Config.SamplingTime = ADC_SAMPLETIME_3CYCLES;
ADC_Config.Offset = 0;
if (HAL_ADC_ConfigChannel(&ADC_Handle, &ADC_Config) != HAL_OK)
{
while(1);
}
// 外设中断优先级配置和使能中断配置
HAL_NVIC_SetPriority(ADC_DMA_IRQ, 1, 1);
HAL_NVIC_EnableIRQ(ADC_DMA_IRQ);
HAL_ADC_Start_DMA(&ADC_Handle, (uint32_t*)&adc_buff, ADC_NUM_MAX);
}
|
ADC_Mode_Config()函数对ADC进行了配置,具体看代码中各个参数的注释。将ADC配置为循环采集,因实际工程中也进行了电压采集,所以配置了两个转换通道,最后分别配置两个通道参数,就完成了ADC的配置。再配置的最后,使用HAL_ADC_Start_DMA使能DMA传输,就可以开始采集数据了,但是我们还需要对数据进行更多的处理,才能使数据稳定可靠。
5.4.2.2. 数据处理部分¶
5.4.2.2.1. HAL_ADC_ConvCpltCallback()函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 | /**
* @brief 常规转换在非阻塞模式下完成回调
* @param hadc: ADC 句柄.
* @retval 无
*/
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
int32_t adc_mean = 0;
HAL_ADC_Stop_DMA(hadc); // 停止 ADC 采样,处理完一次数据在继续采样
/* 计算电流通道采样的平均值 */
for(uint32_t count = 0; count < ADC_NUM_MAX; count+=2)
{
adc_mean += (int32_t)adc_buff[count];
}
adc_mean_sum += adc_mean / (ADC_NUM_MAX / 2); // 累加电压
adc_mean_count++;
#if 1
adc_mean = 0;
/* 计算电压通道采样的平均值 */
for(uint32_t count = 1; count < ADC_NUM_MAX; count+=2)
{
adc_mean += (int32_t)adc_buff[count];
}
vbus_adc_mean = adc_mean / (ADC_NUM_MAX / 2); // 保存平均值
#else
vbus_adc_mean = adc_buff[1];
#endif
HAL_ADC_Start_DMA(&ADC_Handle, (uint32_t*)&adc_buff, ADC_NUM_MAX); // 开始 ADC 采样
}
|
当DMA搬运ADC_NUM_MAX个数据后,我们预设的BUF已经被填满了ADC采集得到的数据,这时DMA会产生一个中断,最终回调HAL_ADC_ConvCpltCallback通知用户,一轮ADC的采集已经完成。这时我们就可以先使用HAL_ADC_Stop_DMA停止DMA和ADC的工作,进行对数据的处理,当数据处理完成,我们再开启ADC的采集。
在HAL_ADC_ConvCpltCallback()回调函数中,我们对电流采集的原始数据进行 累加 给赋值adc_mean,再将adc_mean除以采集数据的个数(ADC_NUM_MAX/2),以获得采集数据的原始数据平均值。将其 累加 赋值给adc_mean_sum,并对adc_mean_count+1,记录采集次数。完成这些操作后,再重新调用HAL_ADC_Start_DMA以开启新一轮的采集。
在电流数据处理下面,我们可以看到对电压也进行了同样的采集操作,并且添加了宏定义#if,因为同时采集电流电压较为耗时。我们实验时可以将#if置为0,方便我们观察实验现象。
5.4.2.2.2. get_curr_val()函数¶
前面我们通过回调函数获得了采集的原始数据,现在我们对采集得到的原始数据进行处理,以得到真实的电流值。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 | /**
* @brief 获取电流值
* @param 无
* @retval 转换得到的电流值
*/
int32_t get_curr_val(void)
{
static uint8_t flag = 0;
static uint32_t adc_offset = 0; // 偏置电压
int16_t curr_adc_mean = 0; // 电流 ACD 采样结果平均值
curr_adc_mean = adc_mean_sum / adc_mean_count; // 保存平均值
adc_mean_count = 0;
adc_mean_sum = 0;
if (flag < 17)
{
adc_offset = curr_adc_mean; // 多次记录偏置电压,待系统稳定偏置电压才为有效值
flag += 1;
}
if(curr_adc_mean>=adc_offset)
{
curr_adc_mean -= adc_offset; // 减去偏置电压
}else
{
curr_adc_mean=0;
}
float vdc = GET_ADC_VDC_VAL(curr_adc_mean); // 获取电压值
return GET_ADC_CURR_VAL(vdc);
}
|
在get_curr_val()中,我们对采集得到的原始数据累加的和(adc_mean_sum)除以累加次数(adc_mean_count)来求平均值,进行滤波操作,保证数据的稳定性。然后我们将以前的累加次数清零,为后面采集的数据做重新开始累加、滤波的准备。在实际情况中,每采集10次数据做一次滤波,得到的电流数据比较稳定,但是在程序设定时间内可能无法达到每采集10次做一次滤波操作,所以用户可以根据实际的实际需求来设定采集次数,采集间隔等。
必须注意的是,在硬件设计中,并不是以0v为起始电压而是加了1.24v的偏置,具体看图 差分转单端输出结果 中的V1.24。所以我们程序中,使用flag,在开发板上电后电机没有启动时,就先采集17次偏置电压数据(实测中采集17次后的偏执电压较为准确,这个次数和电路达到稳定状态的时间有关),然后将偏置电压保存起来,这里使用static定义adc_offset。最后在每次获取电流值计算时,都会将偏置电压减去,保证数据是正确的。
在得到有效的电流转换电压的采集值后,我们对该电压值进行转换操作,将其转换回电流,调用GET_ADC_CURR_VAL。
1 2 3 | #define VREF 3.3f // 参考电压,理论上是3.3,可通过实际测量得3.258
#define GET_ADC_VDC_VAL(val) ((float)val/(float)65536.0*VREF) // 得到电压值
#define GET_ADC_CURR_VAL(val) (((float)val)/(float)8.0/(float)0.02*(float)1000.0) // 得到电流值,电压放大8倍,0.02是采样电阻,单位mA。
|
只是简单宏定义即可实现。
5.4.2.3. 主函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 | /**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
__IO uint16_t ChannelPulse = PWM_MAX_PERIOD_COUNT*0.5;
uint8_t i = 0;
uint8_t flag = 0;
HAL_Init();
/* 初始化系统时钟为168MHz */
SystemClock_Config();
/* 初始化按键GPIO */
Key_GPIO_Config();
/* 初始化 LED */
LED_GPIO_Config();
/* 电机初始化 */
motor_init();
/* 串口初始化 */
DEBUG_USART_Config();
/* ADC 始化 */
ADC_Init();
set_motor_speed(ChannelPulse);
set_motor_disable(); // 禁用电机
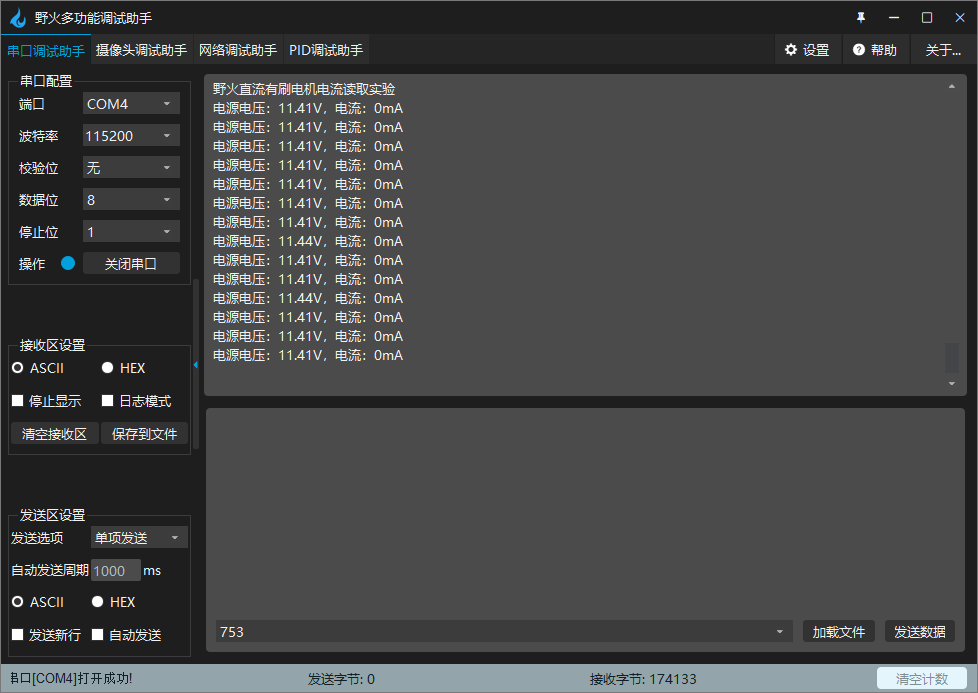
printf("野火直流有刷电机电流读取实验\r\n");
while(1)
{
/* 扫描KEY1 */
if( Key_Scan(KEY1_GPIO_PORT, KEY1_PIN) == KEY_ON)
{
/* 使能电机 */
set_motor_enable();
}
/* 扫描KEY2 */
if( Key_Scan(KEY2_GPIO_PORT, KEY2_PIN) == KEY_ON)
{
/* 禁用电机 */
set_motor_disable();
}
/* 扫描KEY3 */
if( Key_Scan(KEY3_GPIO_PORT, KEY3_PIN) == KEY_ON)
{
/* 增大占空比 */
ChannelPulse += PWM_MAX_PERIOD_COUNT/10;
if(ChannelPulse > PWM_MAX_PERIOD_COUNT)
ChannelPulse = PWM_MAX_PERIOD_COUNT;
set_motor_speed(ChannelPulse);
}
/* 扫描KEY4 */
if( Key_Scan(KEY4_GPIO_PORT, KEY4_PIN) == KEY_ON)
{
if(ChannelPulse < PWM_MAX_PERIOD_COUNT/10)
ChannelPulse = 0;
else
ChannelPulse -= PWM_MAX_PERIOD_COUNT/10;
set_motor_speed(ChannelPulse);
}
/* 扫描KEY5 */
if( Key_Scan(KEY5_GPIO_PORT, KEY5_PIN) == KEY_ON)
{
/* 转换方向 */
set_motor_direction( (++i % 2) ? MOTOR_FWD : MOTOR_REV);
}
if (HAL_GetTick()%50 == 0 && flag == 0) // 每50毫秒读取一次电流、电压
{
flag = 1;
int32_t current = get_curr_val();
#if 0//defined(PID_ASSISTANT_EN)
set_computer_value(SEED_FACT_CMD, CURVES_CH1, ¤t, 1);
#else
printf("电源电压:%.2fV,电流:%dmA\r\n", get_vbus_val(), current);
#endif
}
else if (HAL_GetTick()%50 != 0 && flag == 1)
{
flag = 0;
}
}
}
|
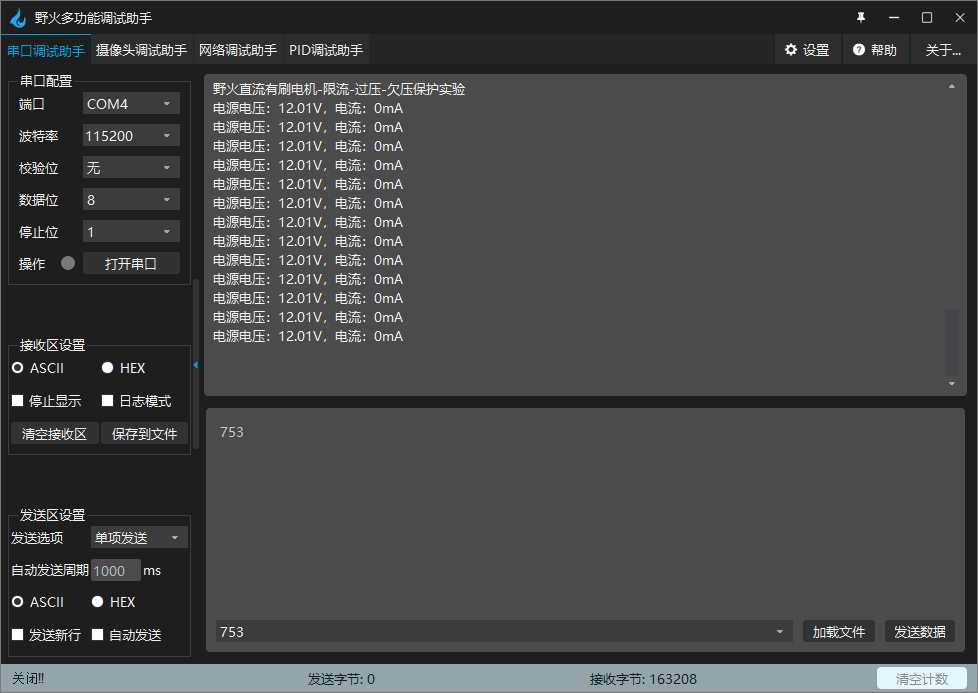
我们通过主函数打印,就可以检测电压电流获取的情况如何了。
5.4.3. 下载验证¶
5.5. 在STM32中实现限电流-过压-欠压保护¶
在前面我们通过软件获取了电路的工作状态,现在我们就可以通过获取到的工作状态来设计一些应用,例如在实际的使用场景里,我们常常需要关注电路工作时的状态是否正常,如果发生故障,应当即可进行处理,否则很容以损坏设备,下面我们通过编写软件来实现电路的一些保护功能。
5.5.1. 软件设计¶
配套代码在下面目录中可以找到:
basis_part\F407\直流有刷减速电机-限电流-过压-欠压保护-MOS管搭建板
5.5.1.1. 编程要点¶
实现ADC看门狗,设定过压欠压保护,异常时处理。
监控电流状态,异常时停机
测试代码
5.5.2. 软件分析¶
5.5.2.1. ADC_Init函数¶
与前面电流采集的ADC_Init()函数除了ADC模式配置有区别外,其他初始化部分相同,下面我们来看不同的部分:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 | /**
* @brief ADC 和 DMA 初始化
* @param 无
* @retval 无
*/
static void ADC_Mode_Config(void)
{
/*************************************************************************/
/********************************前面代码部分相同,省略********************************/
/*************************************************************************/
/** Configure the analog watchdog
*/
ADC_AnalogWDGConfTypeDef AnalogWDGConfig = {0};
AnalogWDGConfig.WatchdogMode = ADC_ANALOGWATCHDOG_SINGLE_REG;
AnalogWDGConfig.HighThreshold = VBUS_HEX_MAX;
AnalogWDGConfig.LowThreshold = VBUS_HEX_MIN;
AnalogWDGConfig.Channel = VBUS_ADC_CHANNEL;
AnalogWDGConfig.ITMode = ENABLE;
if (HAL_ADC_AnalogWDGConfig(&ADC_Handle, &AnalogWDGConfig) != HAL_OK)
{
while(1);
}
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
ADC_Config.Channel = VBUS_ADC_CHANNEL;
ADC_Config.Rank = 2;
// 采样时间间隔
ADC_Config.SamplingTime = ADC_SAMPLETIME_3CYCLES;
ADC_Config.Offset = 0;
if (HAL_ADC_ConfigChannel(&ADC_Handle, &ADC_Config) != HAL_OK)
{
while(1);
}
// 外设中断优先级配置和使能中断配置
HAL_NVIC_SetPriority(ADC_DMA_IRQ, 1, 1);
HAL_NVIC_EnableIRQ(ADC_DMA_IRQ);
HAL_NVIC_SetPriority(ADC_VBUS_IRQ, 0, 1);
HAL_NVIC_EnableIRQ(ADC_VBUS_IRQ);
HAL_ADC_Start_DMA(&ADC_Handle, (uint32_t*)&adc_buff, ADC_NUM_MAX);
}
|
在上图中,我们可以看到多了一个ADC_AnalogWDGConfTypeDef结构体的配置,这就时ADC模拟看门狗。ADC模拟看门狗的功能与STM32的看门狗外设功能大致相同,如果对看门狗不了解,请看《野火STM32库开发实战指南》看门狗章节。配置好了ADC模拟看门狗的溢出上下限,使能中断,我们就可以使用ADC模拟看门狗外设对电路电压进行异常检测了。当电路异常时,看门狗会触发中断回调,我们通过编写中断回调函数就可以对异常进行一定处理。
5.5.2.2. ADC模拟看门狗溢出回调函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | /**
* @brief 在非阻塞模式模拟看门狗回调
* @param hadc: ADC 句柄.
* @retval 无
*/
void HAL_ADC_LevelOutOfWindowCallback(ADC_HandleTypeDef* hadc)
{
flag_num++; // 电源电压超过阈值电压
if (vbus_adc_mean > VBUS_HEX_MIN && vbus_adc_mean < VBUS_HEX_MAX)
flag_num = 0;
if (flag_num > ADC_NUM_MAX) // 电源电压超过阈值电压10次
{
set_motor_disable();
flag_num = 0;
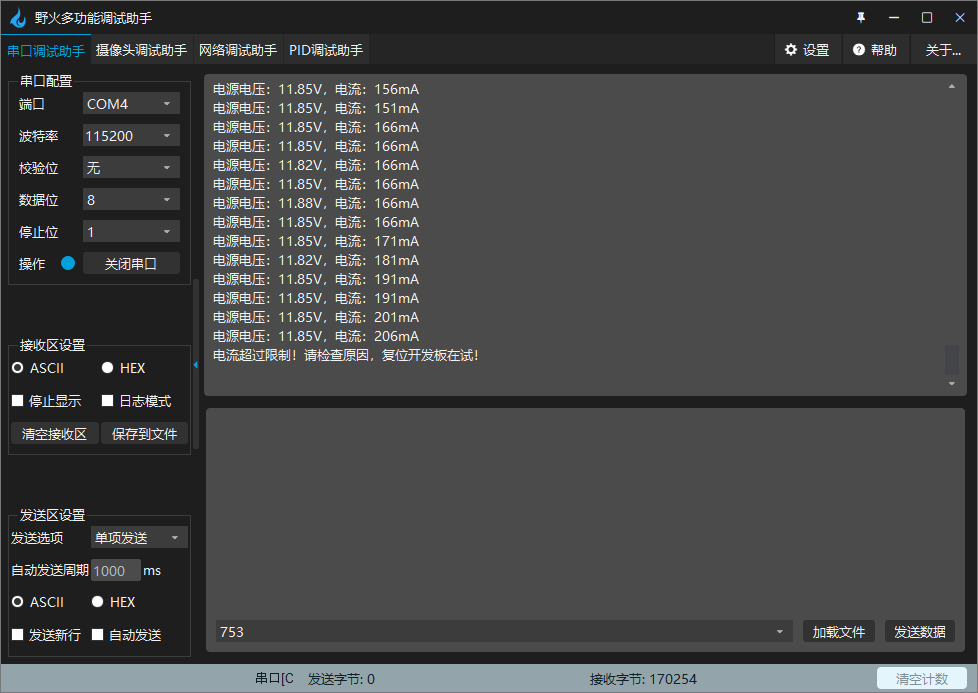
LED1_ON;
printf("电源电压超过限制!请检查原因,复位开发板在试!\r\n");
while(1);
}
}
|
当看门狗检测到溢出时,会触发此中断回调函数。在函数中,我们使用了flag_num来记录触发异常的次数,如果flag_num超过阈值,我们则认为电路异常了,这时采取电机停机、LED灯显示提示、串口打印等来提示用户电路异常的情况,在实际应用中,我们则根据实际需要来调整这部分代码。
5.5.2.3. 主函数¶
在上面我们配置了ADC模拟看门狗来做电压保护,我们现在用另一种方式,来处理限制电流的情况,就是在主函数中轮询。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 | /**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
__IO uint16_t ChannelPulse = PWM_MAX_PERIOD_COUNT*0.5;
uint8_t curr_max_count = 0;
uint8_t flag = 0;
uint8_t dir = 0;
HAL_Init();
/* 初始化系统时钟为168MHz */
SystemClock_Config();
/* 初始化按键GPIO */
Key_GPIO_Config();
/* 初始化 LED */
LED_GPIO_Config();
/* 电机初始化 */
motor_init();
/* 串口初始化 */
DEBUG_USART_Config();
/* ADC 始化 */
ADC_Init();
set_motor_speed(ChannelPulse);
set_motor_disable(); // 禁用电机
printf("野火直流有刷电机-限流-过压-欠压保护实验\r\n");
while(1)
{
/* 扫描KEY1 */
if( Key_Scan(KEY1_GPIO_PORT, KEY1_PIN) == KEY_ON)
{
/* 使能电机 */
set_motor_enable();
}
/* 扫描KEY2 */
if( Key_Scan(KEY2_GPIO_PORT, KEY2_PIN) == KEY_ON)
{
/* 禁用电机 */
set_motor_disable();
}
/* 扫描KEY3 */
if( Key_Scan(KEY3_GPIO_PORT, KEY3_PIN) == KEY_ON)
{
/* 增大占空比 */
ChannelPulse += PWM_MAX_PERIOD_COUNT/10;
if(ChannelPulse > PWM_MAX_PERIOD_COUNT)
ChannelPulse = PWM_MAX_PERIOD_COUNT;
set_motor_speed(ChannelPulse);
}
/* 扫描KEY4 */
if( Key_Scan(KEY4_GPIO_PORT, KEY4_PIN) == KEY_ON)
{
if(ChannelPulse < PWM_MAX_PERIOD_COUNT/10)
ChannelPulse = 0;
else
ChannelPulse -= PWM_MAX_PERIOD_COUNT/10;
set_motor_speed(ChannelPulse);
}
/* 扫描KEY5 */
if( Key_Scan(KEY5_GPIO_PORT, KEY5_PIN) == KEY_ON)
{
/* 转换方向 */
set_motor_direction( (++dir % 2) ? MOTOR_FWD : MOTOR_REV);
}
if (HAL_GetTick()%50 == 0 && flag == 0) // 每50毫秒读取一次电流、电压
{
flag = 1;
int32_t current = get_curr_val();
#if 0//defined(PID_ASSISTANT_EN)
set_computer_value(SEED_FACT_CMD, CURVES_CH1, ¤t, 1);
#else
printf("电源电压:%.2fV,电流:%dmA\r\n", get_vbus_val(), current);
#endif
if (current > CURR_MAX) // 判断是不是超过限定的值
{
if (curr_max_count++ > 5) // 连续5次超过
{
LED2_ON;
set_motor_disable();
curr_max_count = 0;
printf("电流超过限制!请检查原因,复位开发板在试!\r\n");
while(1);
}
}
}
else if (HAL_GetTick()%50 != 0 && flag == 1)
{
flag = 0;
}
}
}
|
同样地,我们在主函数中通过不断轮询电压值是否超过预设值,来记录超限的次数,如果电流超过限制次数到达预设数,则认为电路可能发生故障,提示用户处理。