
22. I2C—读写EEPROM¶
本章参考资料:《STM32F10X-中文参考手册》I2C章节及《I2C总线协议》。
若对I2C通讯协议不了解,可先阅读《I2C总线协议》文档的内容学习。
关于EEPROM存储器,请参考“常用存储器介绍”章节,实验中的EEPROM,请参考其规格书《AT24C02》来了解。
22.1. I2C协议简介¶
I2C 通讯协议(Inter-Integrated Circuit)是由Phiilps公司开发的,由于它引脚少,硬件实现简单,可扩展性强,不需要USART、CAN等通讯协议的外部收发设备,现在被广泛地使用在系统内多个集成电路(IC)间的通讯。
在计算机科学里,大部分复杂的问题都可以通过分层来简化。如芯片被分为内核层和片上外设;STM32HAL库则是在寄存器与用户代码之间的软件层。对于通讯协议,我们也以分层的方式来理解,最基本的是把它分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准。简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。
下面我们分别对I2C协议的物理层及协议层进行讲解。
22.1.1. I2C物理层¶
I2C通讯设备之间的常用连接方式见 图23_1。
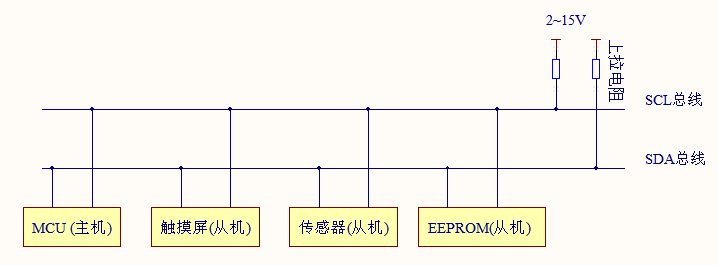
图 23‑1 常见的I2C通讯系统
它的物理层有如下特点:
它是一个支持设备的总线。“总线”指多个设备共用的信号线。在一个I2C通讯总线中,可连接多个I2C通讯设备,支持多个通讯主机及多个通讯从机。
一个I2C总线只使用两条总线线路,一条双向串行数据线(SDA) ,一条串行时钟线 (SCL)。数据线即用来表示数据,时钟线用于数据收发同步。
每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备之间的访问。
总线通过上拉电阻接到电源。当I2C设备空闲时,会输出高阻态,而当所有设备都空闲,都输出高阻态时,由上拉电阻把总线拉成高电平。
多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线。
具有三种传输模式:标准模式传输速率为100kbit/s ,快速模式为400kbit/s ,高速模式下可达 3.4Mbit/s,但目前大多I2C设备尚不支持高速模式。
连接到相同总线的 IC 数量受到总线的最大电容 400pF 限制 。
22.1.2. 协议层¶
I2C的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等环节。
22.1.2.1. I2C基本读写过程¶
先看看I2C通讯过程的基本结构,它的通讯过程见 图23_2、图23_3 及 图23_4。

图 23‑2 主机写数据到从机
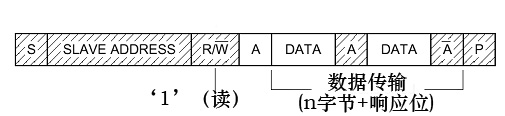
图 23‑3 主机由从机中读数据
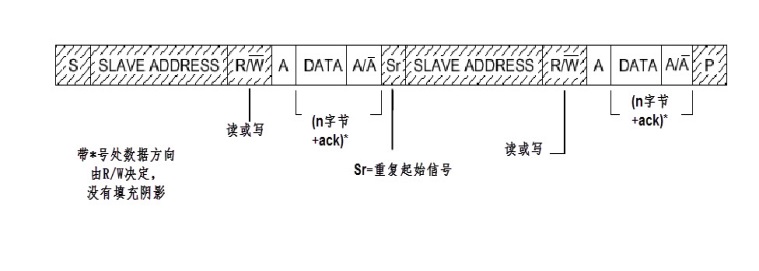
图 23‑4 I2C通讯复合格式
图例:

数据由主机传输至从机
S : 传输开始信号
SLAVE_ADDRESS: 从机地址

数据由从机传输至主机
R/W- : 传输方向选择位,1为读,0为写
A/A- : 应答(ACK)或非应答(NACK)信号
P : 停止传输信号
这些图表示的是主机和从机通讯时,SDA线的数据包序列。
其中S表示由主机的I2C接口产生的传输起始信号(S),这时连接到I2C总线上的所有从机都会接收到这个信号。
起始信号产生后,所有从机就开始等待主机紧接下来广播 的从机地址信号 (SLAVE_ADDRESS)。在I2C总线上,每个设备的地址都是唯一的,当主机广播的地址与某个设备地址相同时, 这个设备就被选中了,没被选中的设备将会忽略之后的数据信号。根据I2C协议,这个从机地址可以是7位或10位。
在地址位之后,是传输方向的选择位,该位为0时,表示后面的数据传输方向是由主机传输至从机,即主机向从机写数据。该位为1时,则相反,即主机由从机读数据。
从机接收到匹配的地址后,主机或从机会返回一个应答(ACK)或非应答(NACK)信号,只有接收到应答信号后,主机才能继续发送或接收数据。
写数据
若配置的方向传输位为“写数据”方向,即第一幅图的情况,广播完地址, 接收到应答信号后,主机开始正式向从机传输数据(DATA), 数据包的大小为8位,主机每发送完一个字节数据,都要等待从机的应答信号(ACK), 重复这个过程,可以向从机传输N个数据,这个N没有大小限制。当数据传输结束时,主机向从机发送一个停止传输信号(P),表示不再传输数据。
读数据
若配置的方向传输位为“读数据”方向,即第二幅图的情况,广播完地址, 接收到应答信号后,从机开始向主机返回数据(DATA),数据包大小也为8位, 从机每发送完一个数据,都会等待主机的应答信号(ACK),重复这个过程,可以返回N个数据,这个N也没有大小限制。 当主机希望停止接收数据时,就向从机返回一个非应答信号(NACK),则从机自动停止数据传输。
读和写数据
除了基本的读写,I2C通讯更常用的是复合格式,即第三幅图的情况,该传输过程有两次起始信号(S)。一般在第一次传输中,主机通过 SLAVE_ADDRESS寻找到从设备后,发送一段“数据”,这段数据通常用于表示从设备内部的寄存器或存储器地址(注意区分它与SLAVE_ADDRESS的区别);在第二次的传输中,对该地址的内容进行读或写。也就是说,第一次通讯是告诉从机读写地址,第二次则是读写的实际内容。
以上通讯流程中包含的各个信号分解如下:
22.1.2.2. 通讯的起始和停止信号¶
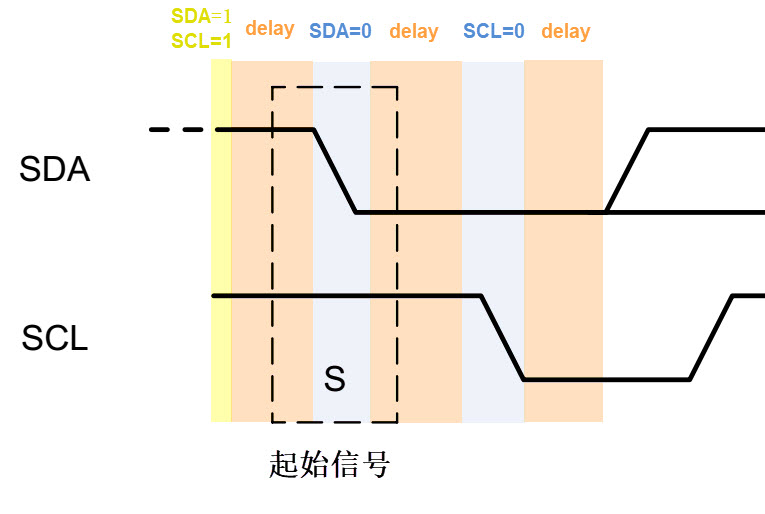
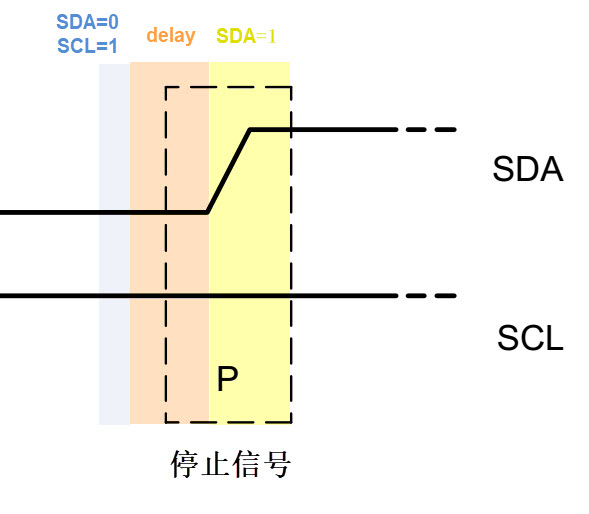
前文中提到的起始(S)和停止(P)信号是两种特殊的状态,见图 23‑5。当 SCL 线是高电平时 SDA 线从高电平向低电平切换,这个情况表示通讯的起始。当 SCL 是高电平时 SDA 线由低电平向高电平切换,表示通讯的停止。起始和停止信号一般由主机产生。
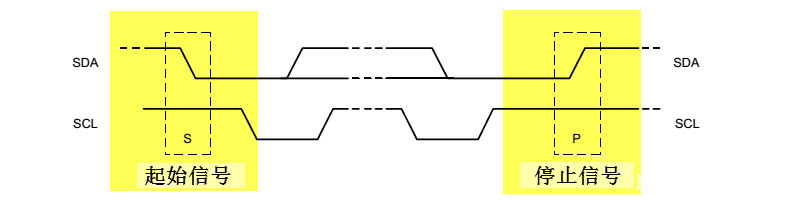
图 23‑5 起始和停止信号
22.1.2.3. 数据有效性¶
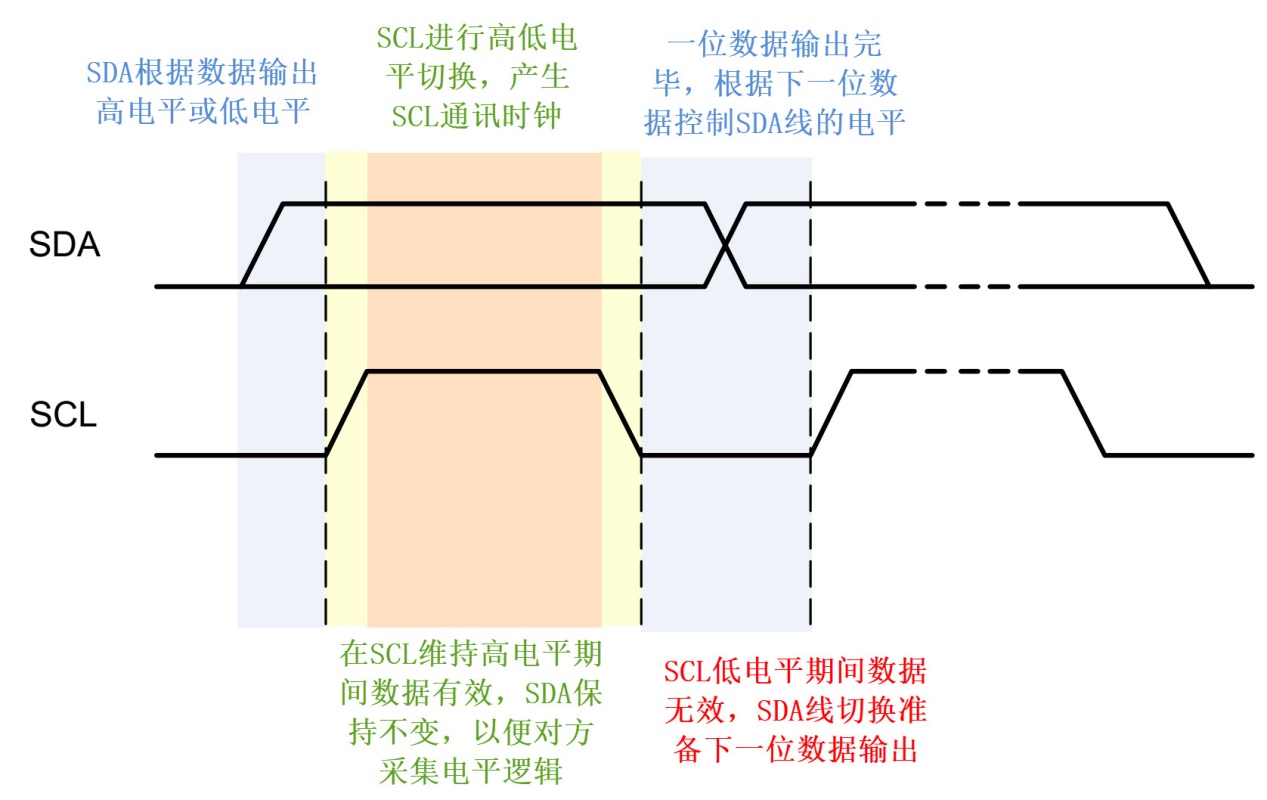
I2C使用SDA信号线来传输数据,使用SCL信号线进行数据同步。见 图23_6。 SDA数据线在SCL的每个时钟周期传输一位数据。传输时,SCL为高电平的时候SDA表示的数据有效,即此时的SDA为高电平时表示数据“1”,为低电平时表示数据“0”。当SCL为低电平时,SDA的数据无效,一般在这个时候SDA进行电平切换,为下一次表示数据做好准备。
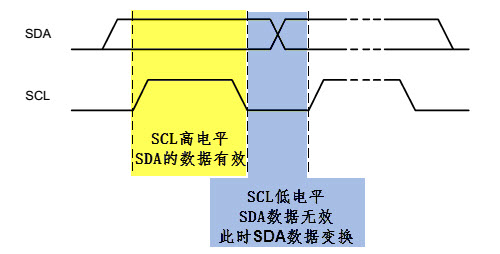
图 23‑6 数据有效性
每次数据传输都以字节为单位,每次传输的字节数不受限制。
22.1.2.4. 地址及数据方向¶
I2C总线上的每个设备都有自己的独立地址,主机发起通讯时,通过SDA信号线发送设备地址(SLAVE_ADDRESS)来查找从机。 I2C协议规定设备地址可以是7位或10位,实际中7位的地址应用比较广泛。 紧跟设备地址的一个数据位用来表示数据传输方向,它是数据方向位(R/),第8位或第11位。数据方向位为“1”时表示主机由从机读数据, 该位为“0”时表示主机向从机写数据。见 图23_7。
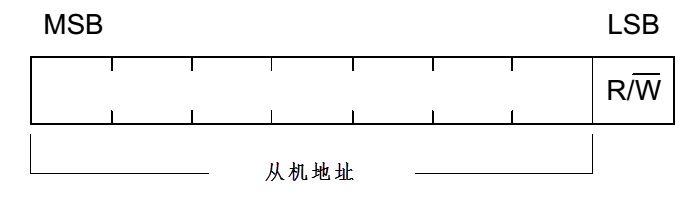
图 23‑7 设备地址(7位)及数据传输方向
读数据方向时,主机会释放对SDA信号线的控制,由从机控制SDA信号线,主机接收信号,写数据方向时,SDA由主机控制,从机接收信号。
22.1.2.5. 响应¶
I2C的数据和地址传输都带响应。响应包括“应答(ACK)”和“非应答(NACK)”两种信号。作为数据接收端时, 当设备(无论主从机)接收到I2C传输的一个字节数据或地址后,若希望对方继续发送数据, 则需要向对方发送“应答(ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输, 则向对方发送“非应答(NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。见 图23_8。
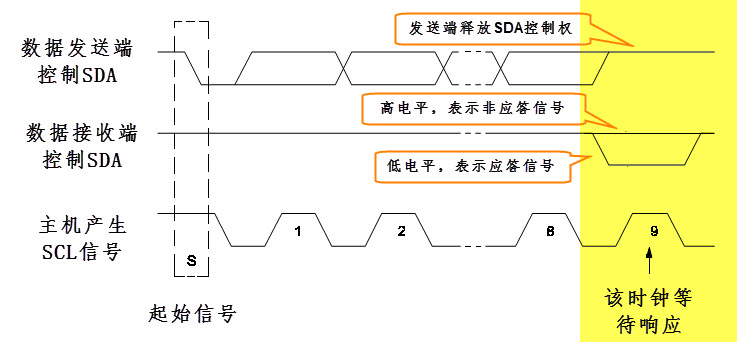
图 23‑8 响应与非响应信号
传输时主机产生时钟,在第9个时钟时,数据发送端会释放SDA的控制权,由数据接收端控制SDA,若SDA为高电平,表示非应答信号(NACK),低电平表示应答信号(ACK)。
22.2. STM32的I2C特性及架构¶
如果我们直接控制STM32的两个GPIO引脚,分别用作SCL及SDA,按照上述信号的时序要求,直接像控制LED灯那样控制引脚的输出(若是接收数据时则读取SDA电平),就可以实现I2C通讯。同样,假如我们按照USART的要求去控制引脚,也能实现USART通讯。所以只要遵守协议,就是标准的通讯,不管您如何实现它,不管是ST生产的控制器还是ATMEL生产的存储器, 都能按通讯标准交互。
由于直接控制GPIO引脚电平产生通讯时序时,需要由CPU控制每个时刻的引脚状态,所以称之为“软件模拟协议”方式。
相对地,还有“硬件协议”方式,STM32的I2C片上外设专门负责实现I2C通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种由硬件外设处理I2C协议的方式减轻了CPU的工作,且使软件设计更加简单。
22.2.1. STM32的I2C外设简介¶
STM32的I2C外设可用作通讯的主机及从机,支持100Kbit/s和400Kbit/s的速率,支持7位、10位设备地址,支持DMA数据传输,并具有数据校验功能。它的I2C外设还支持SMBus2.0协议,SMBus协议与I2C类似,主要应用于笔记本电脑的电池管理中,本教程不展开,感兴趣的读者可参考《SMBus20》文档了解。
22.2.2. STM32的I2C架构剖析¶
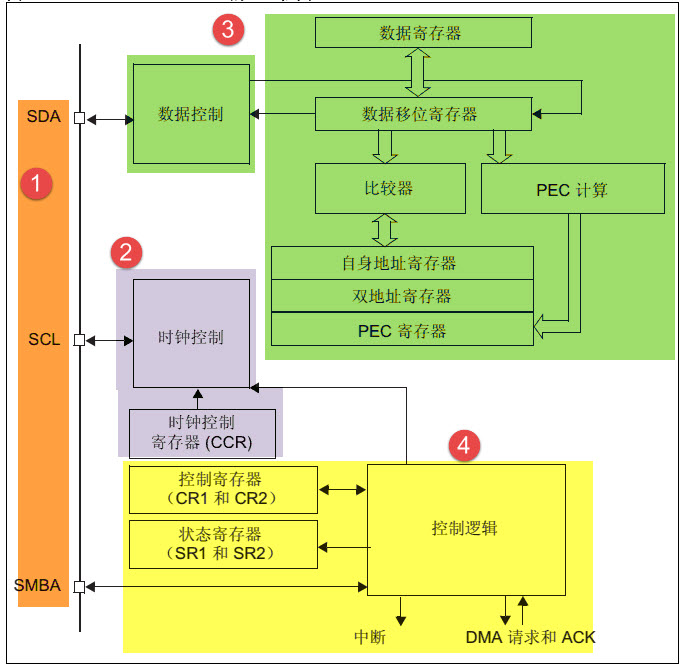
图 23‑9 I2C架构图
22.2.2.1. 通讯引脚¶
I2C的所有硬件架构都是根据图中左侧SCL线和SDA线展开的(其中的SMBA线用于SMBUS的警告信号,I2C通讯没有使用)。 STM32芯片有多个I2C外设,它们的I2C通讯信号引出到不同的GPIO引脚上,使用时必须配置到这些指定的引脚,见 表 23‑1。关于GPIO引脚的复用功能,以规格书为准。
表 23‑1 STM32F10x的I2C引脚
引脚 |
I2C1 |
I2C2 |
SCL |
PB6 / PB8(重映射) |
PB10 |
SDA |
PB7 / PB9(重映射) |
PB11 |
22.2.2.2. 时钟控制逻辑¶
SCL线的时钟信号,由I2C接口根据时钟控制寄存器(CCR)控制,控制的参数主要为时钟频率。 配置I2C的CCR寄存器可修改通讯速率相关的参数:
可选择I2C通讯的“标准/快速”模式,这两个模式分别I2C对应100/400Kbit/s的通讯速率。
在快速模式下可选择SCL时钟的占空比,可选Tlow/Thigh=2或Tlow/Thigh=16/9模式,我们知道 I2C协议在SCL高电平时对SDA信号采样,SCL低电平时SDA准备下一个数据,修改 SCL的高低电平比会影响数据采样,但其实这两个模式的比例差别并不大,若不是要求非常严格,这里随便选就可以了。
CCR寄存器中还有一个12位的配置因子CCR,它与I2C外设的输入时钟源共同作用, 产生SCL时钟,STM32的I2C外设都挂载在APB1总线上,使用APB1的时钟源PCLK1,SCL信号线的输出时钟公式如下:
标准模式:
Thigh=CCR*TPCKL1 Tlow = CCR*TPCLK1
快速模式中 Tlow/Thigh=2 时:
Thigh = CCR*TPCKL1 Tlow = 2*CCR*TPCKL1
快速模式中 Tlow/Thigh=16/9 时:
Thigh = 9*CCR*TPCKL1 Tlow = 16*CCR*TPCKL1
例如,我们的PCLK1=36MHz,想要配置400Kbit/s的速率,计算方式如下:
PCLK时钟周期: TPCLK1 = 1/36000000
目标SCL时钟周期: TSCL = 1/400000
SCL时钟周期内的高电平时间: THIGH = TSCL/3
SCL时钟周期内的低电平时间: TLOW = 2*TSCL/3
计算CCR的值: CCR = THIGH/TPCLK1 = 30
计算结果得出CCR为30,向该寄存器位写入此值则可以控制IIC的通讯速率为400KHz,其实即使配置出来的SCL时钟不完全等于标准的400KHz,IIC通讯的正确性也不会受到影响,因为所有数据通讯都是由SCL协调的,只要它的时钟频率不远高于标准即可。
22.2.2.3. 数据控制逻辑¶
I2C的SDA信号主要连接到数据移位寄存器上,数据移位寄存器的数据来源及目标是数据寄存器(DR)、地址寄存器(OAR)、PEC寄存器以及SDA数据线。当向外发送数据的时候,数据移位寄存器以“数据寄存器”为数据源,把数据一位一位地通过SDA信号线发送出去;当从外部接收数据的时候,数据移位寄存器把SDA信号线采样到的数据一位一位地存储到“数据寄存器”中。若使能了数据校验,接收到的数据会经过PCE计算器运算,运算结果存储在“PEC寄存器”中。当STM32的I2C工作在从机模式的时候,接收到设备地址信号时,数据移位寄存器会把接收到的地址与STM32的自身的“I2C地址寄存器”的值作比较,以便响应主机的寻址。STM32的自身I2C地址可通过修改“自身地址寄存器”修改,支持同时使用两个I2C设备地址,两个地址分别存储在OAR1和OAR2中。
22.2.2.4. 整体控制逻辑¶
整体控制逻辑负责协调整个I2C外设,控制逻辑的工作模式根据我们配置的“控制寄存器(CR1/CR2)”的参数而改变。在外设工作时,控制逻辑会根据外设的工作状态修改“状态寄存器(SR1和SR2)”,我们只要读取这些寄存器相关的寄存器位,就可以了解I2C的工作状态。除此之外,控制逻辑还根据要求,负责控制产生I2C中断信号、DMA请求及各种I2C的通讯信号(起始、停止、响应信号等)。
22.2.3. 通讯过程¶
使用I2C外设通讯时,在通讯的不同阶段它会对“状态寄存器(SR1及SR2)”的不同数据位写入参数,我们通过读取这些寄存器标志来了解通讯状态。
22.2.3.1. 主发送器¶
见 图23_10 。图中的是“主发送器”流程,即作为I2C通讯的主机端时,向外发送数据时的过程。
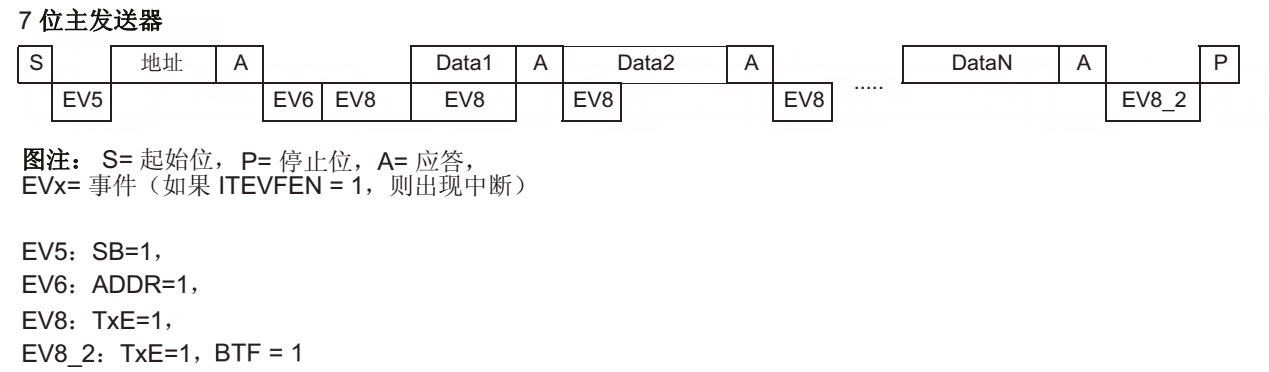
图 23‑10 主发送器通讯过程
主发送器发送流程及事件说明如下:
控制产生起始信号(S),当发生起始信号后,它产生事件“EV5”,并会对SR1寄存器的“SB”位置1,表示起始信号已经发送;
紧接着发送设备地址并等待应答信号,若有从机应答,则产生事件“EV6”及“EV8”,这时SR1寄存器的“ADDR”位及“TXE”位被置1,ADDR 为1表示地址已经发送,TXE为1表示数据寄存器为空;
(3) 以上步骤正常执行并对ADDR位清零后,我们往I2C的“数据寄存器DR”写入要发送的数据, 这时TXE位会被重置0,表示数据寄存器非空,I2C外设通过SDA信号线一位位把数据发送出去后, 又会产生“EV8”事件,即TXE位被置1,重复这个过程,就可以发送多个字节数据了;
当我们发送数据完成后,控制I2C设备产生一个停止信号(P),这个时候会产生EV8_2事件,SR1的TXE位及BTF位都被置1,表示通讯结束。
假如我们使能了I2C中断,以上所有事件产生时,都会产生I2C中断信号,进入同一个中断服务函数,到I2C中断服务程序后,再通过检查寄存器位来判断是哪一个事件。
22.2.3.2. 主接收器¶
再来分析主接收器过程,即作为I2C通讯的主机端时,从外部接收数据的过程,见 图23_11。
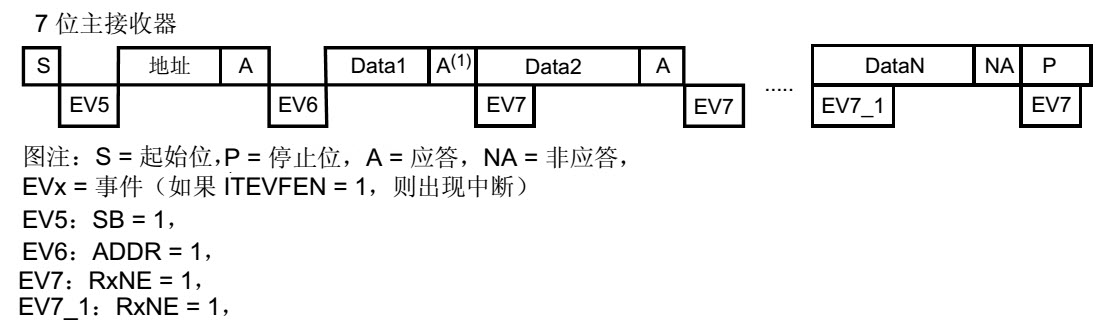
图 23‑11 主接收器过程
主接收器接收流程及事件说明如下:
同主发送流程,起始信号(S)是由主机端产生的,控制发生起始信号后,它产生事件“EV5”,并会对SR1寄存器的“SB”位置1,表示起始信号已经发送;
紧接着发送设备地址并等待应答信号,若有从机应答,则产生事件“EV6”这时SR1寄存器的“ADDR”位被置1,表示地址已经发送。
(3) 从机端接收到地址后,开始向主机端发送数据。当主机接收到这些数据后,会产生“EV7”事件,SR1寄存器的RXNE被置1, 表示接收数据寄存器非空,我们读取该寄存器后, 可对数据寄存器清空,以便接收下一次数据。此时我们可以控制I2C发送应答信号(ACK)或非应 答信号(NACK),若应答,则重复以上步骤接收数据,若非应答,则停止传输;
发送非应答信号后,产生停止信号(P),结束传输。
在发送和接收过程中,有的事件不只是标志了我们上面提到的状态位,还可能同时标志主机状态之类的状态位,而且读了之后还需要清除标志位,比较复杂。我们可使用STM32HAL库函数来直接检测这些事件的复合标志,降低编程难度。
22.3. I2C初始化结构体详解¶
跟其它外设一样,STM32 HAL库提供了I2C初始化结构体及初始化函数来配置I2C外设。初始化结构体及函数定义在库文件“stm32f4xx_hal_i2c.h”及“stm32f4xx_hal_i2c.c”中, 编程时我们可以结合这两个文件内的注释使用或参考库帮助文档。了解初始化结构体后我们就能对I2C外设运用自如了,见 代码清单23_1。
typedef struct {
uint32_t ClockSpeed; /*!< 设置SCL时钟频率,此值要低于40 0000*/
uint32_t DutyCycle; /*指定时钟占空比,可选low/high = 2:1及16:9模式*/
uint32_t OwnAddress1; /*指定自身的I2C设备地址1,可以是 7-bit或者10-bit*/
uint32_t AddressingMode; /*指定地址的长度模式,可以是7bit模式或者10bit模式*/
uint32_t DualAddressMode; /*设置双地址模式 */
uint32_t OwnAddress2; /*指定自身的I2C设备地址2,只能是 7-bit */
uint32_t GeneralCallMode; /*指定广播呼叫模式 */
uint32_t NoStretchMode; /*指定禁止时钟延长模式*/
} I2C_InitTypeDef;
这些结构体成员说明如下,其中括号内的文字是对应参数在STM32 HAL库中定义的宏:
ClockSpeed
本成员设置的是I2C的传输速率,在调用初始化函数时,函数会根据我们输入的数值写入到I2C的时钟控制寄存器CCR。这个数值的计算上一节已经说明。
DutyCycle
本成员设置的是I2C的SCL线时钟的占空比。该配置有两个选择,分别为低电平时间比高电平时间为2:1 (I2C_DUTYCYCLE_2)和16:9 (I2C_DUTYCYCLE_16_9)。其实这两个模式的比例差别并不大,一般要求都不会如此严格,这里随便选就可以了。
OwnAddress1
本成员配置的是STM32的I2C设备自身地址1,每个连接到I2C总线上的设备都要有一个自己的地址, 作为主机也不例外。地址可设置为7位或10位(受下面(3) AddressingMode成员决定),只要该地址是I2C总线上唯一的即可。
STM32的I2C外设可同时使用两个地址,即同时对两个地址作出响应,这个结构成员OwnAddress1配置的是默认的、OAR1寄存器存储的地址,若需要设置第二个地址寄存器OAR2,可使用DualAddressMode成员使能,然后设置OwnAddress2成员即可,OAR2不支持10位地址。
AddressingMode
本成员选择I2C的寻址模式是7位还是10位地址。这需要根据实际连接到I2C总线上设备的地址进行选择,这个成员的配置也影响到OwnAddress1成员,只有这里设置成10位模式时, OwnAddress1才支持10位地址。
DualAddressMode
本成员配置的是STM32的I2C设备自己的地址,每个连接到I2C总线上的设备都要有一个自己的地址, 作为主机也不例外。地址可设置为7位或10位(受下面I2C_dual_addressing_mode成员决定),只要该地址是I2C总线上唯一的即可。
STM32的I2C外设可同时使用两个地址,即同时对两个地址作出响应,这个结构成员I2C_OwnAddress1配置的是默认的、OAR1寄存器存储的地址,若需要设置第二个地址寄存器OAR2,可使用I2C_OwnAddress2Config函数来配置,OAR2不支持10位地址。
OwnAddress2
本成员配置的是STM32的I2C设备自身地址2,每个连接到I2C总线上的设备都要有一个自己的地址, 作为主机也不例外。地址可设置为7位,只要该地址是I2C总线上唯一的即可。
GeneralCallMode
本成员是关于I2C从模式时的广播呼叫模式设置。
NoStretchMode
本成员是关于I2C禁止时钟延长模式设置,用于在从模式下禁止时钟延长。它在主模式下必须保持关闭。
配置完这些结构体成员值,调用库函数HAL_I2C_Init即可把结构体的配置写入到寄存器中。
22.4. I2C—读写EEPROM实验¶
EEPROM是一种掉电后数据不丢失的存储器,常用来存储一些配置信息,以便系统重新上电的时候加载之。 EEPOM芯片最常用的通讯方式就是I2C协议,本小节以EEPROM的读写实验为大家讲解STM32的I2C使用方法。 实验中STM32的I2C外设采用主模式,分别用作主发送器和主接收器,通过查询事件的方式来确保正常通讯。
22.4.1. 硬件设计¶
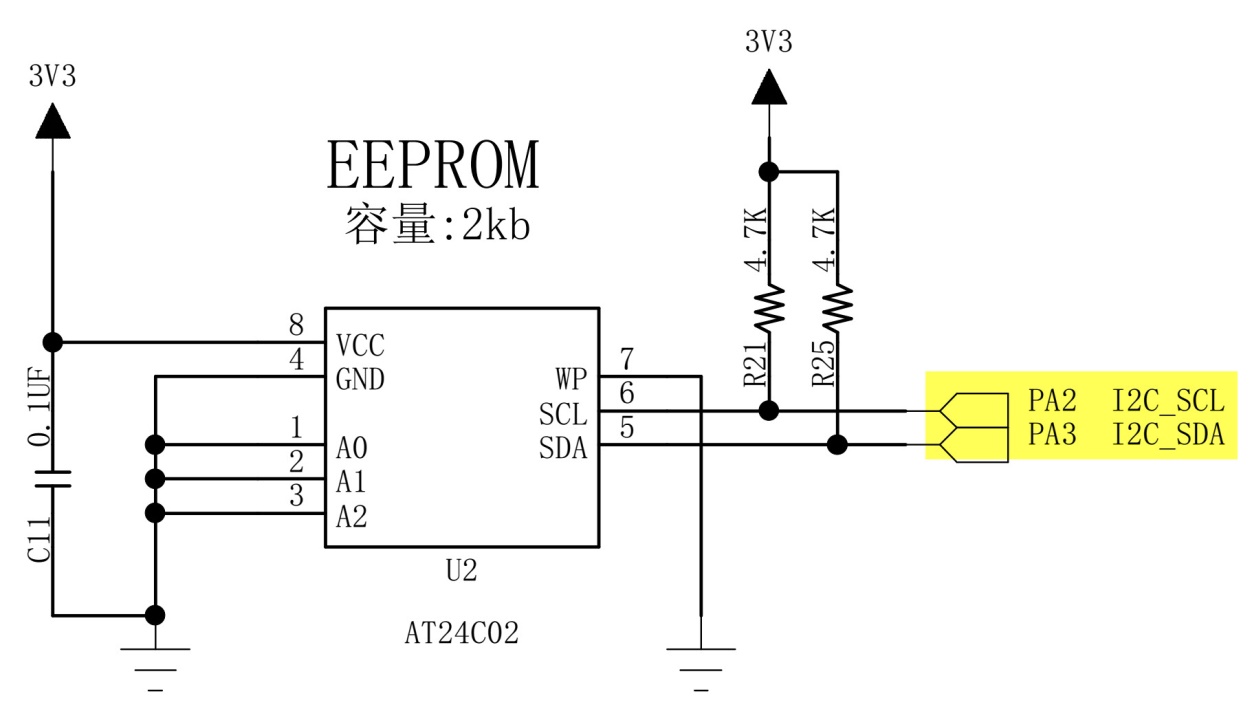
图 23‑12a MINI开发板的EEPROM硬件连接图
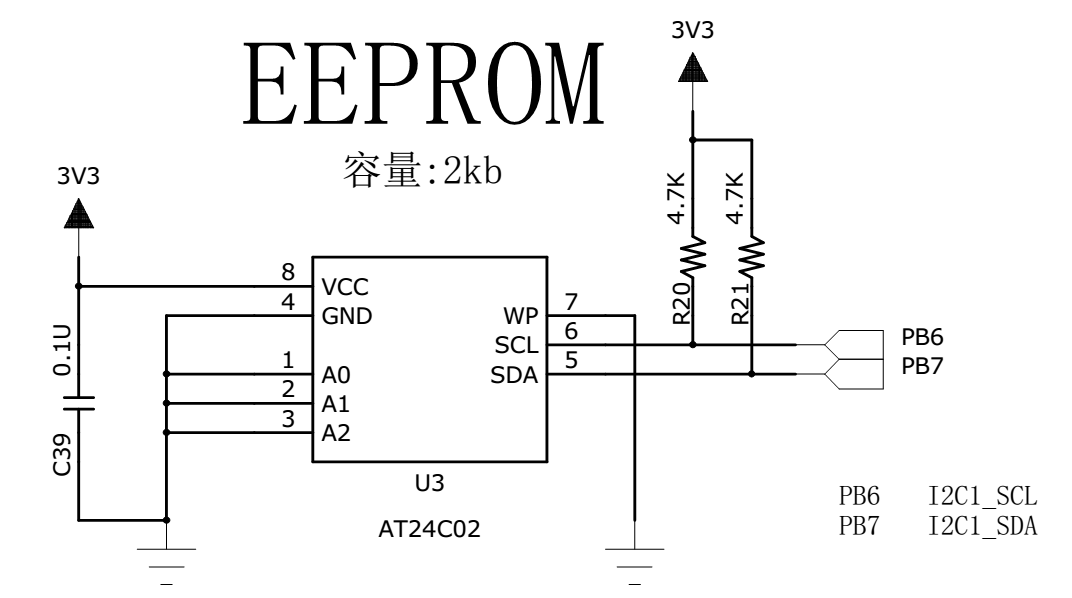
图 23‑12b 指南者和霸道开发板的EEPROM硬件连接图
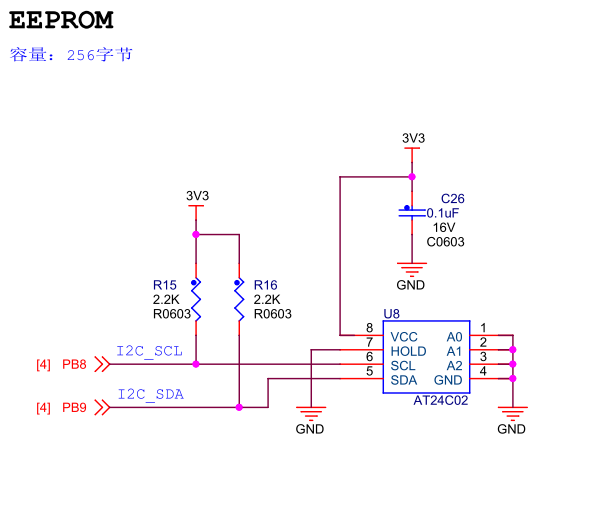
图 23‑12c 拂晓电机开发板的EEPROM硬件连接图
本实验中开发板上的EEPROM芯片(型号都是:AT24C02)的SCL及SDA引脚连接到了STM32对应的I2C引脚中,结合上拉电阻,构成了I2C通讯总线,它们通过I2C总线交互。EEPROM芯片的设备地址一共有7位,其中高4位固定为:1010 b,低3位则由A0/A1/A2信号线的电平决定,见 图23_13,图中的R/W是读写方向位,与地址无关。
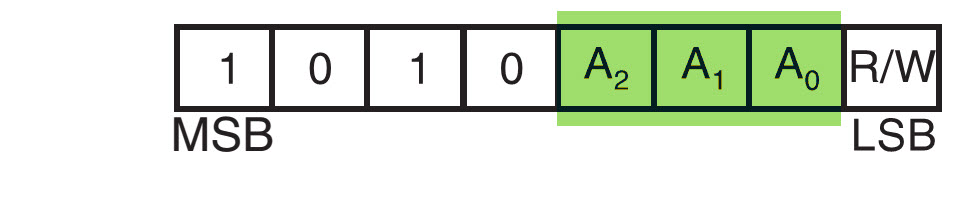
图 23‑13 EEPROM设备地址(摘自《AT24C02》规格书)
按照我们此处的连接,A0/A1/A2均为0,所以EEPROM的7位设备地址是:101 0000b ,即0xA0。由于I2C通讯时常常是地址跟读写方向连在一起构成一个8位数,且当R/W位为0时,表示写方向,所以加上7位地址,其值为“0xA0”,常称该值为I2C设备的“写地址”;当R/W位为1时,表示读方向,加上7位地址,其值为“0xA1”,常称该值为“读地址”。
EEPROM芯片中还有一个WP引脚,具有写保护功能,当该引脚电平为高时,禁止写入数据,当引脚为低电平时,可写入数据,我们直接接地,不使用写保护功能。
关于EEPROM的更多信息,可参考其数据手册《AT24C02》来了解。若您使用的实验板EEPROM的型号、设备地址或控制引脚不一样,只需根据我们的工程修改即可,程序的控制原理相同。
22.4.2. 软件设计¶
为了使工程更加有条理,我们把读写EEPROM相关的代码独立分开存储,方便以后移植。在“工程模板”之上新建“bsp_i2c_ee.c”及“bsp_i2c_ee.h”文件,这些文件也可根据您的喜好命名,它们不属于STM32HAL库的内容,是由我们自己根据应用需要编写的。
22.4.2.1. 编程要点¶
配置通讯使用的目标引脚为开漏模式;
使能I2C外设的时钟;
配置I2C外设的模式、地址、速率等参数并使能I2C外设;
编写基本I2C按字节收发的函数;
编写读写EEPROM存储内容的函数;
编写测试程序,对读写数据进行校验。
22.4.2.2. 代码分析¶
22.4.2.2.1. I2C硬件相关宏定义¶
我们把I2C硬件相关的配置都以宏的形式定义到相应的头文件当中, MINI开发板的定义在“bsp_i2c_gpio.h”中,见 代码清单23_2a, 指南者和霸道、拂晓电机开发板的定义在“bsp_i2c_ee.h”文件中,见 代码清单23_2b、代码清单23_2c。
使用MINI开发板的朋友需要注意的是,I2C引脚PA2、PA3没有硬件自带的I2C复用功能,所以无法通过HAL库去进行I2C功能的配置,我们需要使用软件控制IO口的方式去模拟I2C协议进行通讯。
#define EEPROM_I2C_WR 0 /* 写控制bit */
#define EEPROM_I2C_RD 1 /* 读控制bit */
/* 定义I2C总线连接的GPIO端口,
用户只需要修改下面4行代码即可任意改变SCL和SDA的引脚
*/
#define I2Cx_SDA_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
#define I2Cx_SCL_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
#define EEPROM_GPIO_PORT_I2C GPIOA /* GPIO端口 */
#define EEPROM_I2C_SCL_PIN GPIO_PIN_2 /* 连接到SCL时钟线的GPIO */
#define EEPROM_I2C_SDA_PIN GPIO_PIN_3 /* 连接到SDA数据线的GPIO */
/* 定义读写SCL和SDA的宏,已增加代码的可移植性和可阅读性 */
#if 0 /* 条件编译: 1 选择GPIO的库函数实现IO读写 */
#define EEPROM_I2C_SCL_1() digitalH(EEPROM_GPIO_PORT_I2C,EEPROM_I2C_SCL_PIN) /* SCL = 1 */
#define EEPROM_I2C_SCL_0() digitalL(EEPROM_GPIO_PORT_I2C,EEPROM_I2C_SCL_PIN) /* SCL = 0 */
#define EEPROM_I2C_SDA_1() digitalH(EEPROM_GPIO_PORT_I2C,EEPROM_I2C_SDA_PIN) /* SDA = 1 */
#define EEPROM_I2C_SDA_0() digitalL(EEPROM_GPIO_PORT_I2C,EEPROM_I2C_SDA_PIN) /* SDA = 0 */
#define EEPROM_I2C_SDA_READ() GPIO_ReadInputDataBit(EEPROM_GPIO_PORT_I2C, EEPROM_I2C_SDA_PIN) /* 读SDA口线状态 */
#else /* 这个分支选择直接寄存器操作实现IO读写 */
/* 注意:如下写法,在IAR最高级别优化时,会被编译器错误优化 */
#define EEPROM_I2C_SCL_1() EEPROM_GPIO_PORT_I2C->BSRR =EEPROM_I2C_SCL_PIN /* SCL = 1 */
#define EEPROM_I2C_SCL_0() EEPROM_GPIO_PORT_I2C->BRR =EEPROM_I2C_SCL_PIN /* SCL = 0 */
#define EEPROM_I2C_SDA_1() EEPROM_GPIO_PORT_I2C->BSRR =EEPROM_I2C_SDA_PIN /* SDA = 1 */
#define EEPROM_I2C_SDA_0() EEPROM_GPIO_PORT_I2C->BRR =EEPROM_I2C_SDA_PIN /* SDA = 0 */
#define EEPROM_I2C_SDA_READ() ((EEPROM_GPIO_PORT_I2C->IDR &EEPROM_I2C_SDA_PIN) != 0) /*读SDA口线状态 */
#endif
/* 直接操作寄存器的方法控制IO */
#define digitalH(p,i) {p->BSRR=i;} //设置为高电平
#define digitalL(p,i) {p->BSRR=(uint32_t)i << 16;}//输出低电平
以上代码的前6行,根据硬件连接,把与EEPROM通讯使用的GPIO引脚号都以宏封装起来,以便初始化GPIO模式的时候使用。
第6行后的代码,被条件编译宏“#if…#else…#endif”分成了两部分,当“#if ”中的条件成立,使用第一部分代码,否则使用第二部分代码。 这两部分代码实现的功能完全一样,都是定义了一些宏,用于控制作为SCL、SDA线的GPIO输出高低电平,以及读取SDA线引脚的电平, 这些功能在软件模拟I2C的时候用于产生时序,收发数据,实现I2C协议。这两部分的主要区别是第一部分使用库函数来控制引脚, 代码比较易于理解,而第二部分则直接通过寄存器来控制引脚,它减少了函数调用的开销,在软件模拟I2C时, 这些宏会被频繁调用,所以在本工程中使用第二部分的代码。
/* 这个地址只要与STM32外挂的I2C器件地址不一样即可 */
#define I2C_OWN_ADDRESS7 0X0A
#define I2Cx I2C1
#define I2Cx_CLK_ENABLE() __HAL_RCC_I2C1_CLK_ENABLE()
#define I2Cx_SDA_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define I2Cx_SCL_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define I2Cx_FORCE_RESET() __HAL_RCC_I2C1_FORCE_RESET()
#define I2Cx_RELEASE_RESET() __HAL_RCC_I2C1_RELEASE_RESET()
/* Definition for I2Cx Pins */
#define I2Cx_SCL_PIN GPIO_PIN_6
#define I2Cx_SCL_GPIO_PORT GPIOB
#define I2Cx_SCL_AF GPIO_AF4_I2C1
#define I2Cx_SDA_PIN GPIO_PIN_7
#define I2Cx_SDA_GPIO_PORT GPIOB
#define I2Cx_SDA_AF GPIO_AF4_I2C1
/* 这个地址只要与STM32外挂的I2C器件地址不一样即可 */
#define I2C_OWN_ADDRESS7 0X0A
#define I2Cx I2C1
#define I2Cx_CLK_ENABLE() __HAL_RCC_I2C1_CLK_ENABLE()
#define I2Cx_SDA_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define I2Cx_SCL_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define I2Cx_FORCE_RESET() __HAL_RCC_I2C1_FORCE_RESET()
#define I2Cx_RELEASE_RESET() __HAL_RCC_I2C1_RELEASE_RESET()
/* Definition for I2Cx Pins */
#define I2Cx_SCL_PIN GPIO_PIN_8
#define I2Cx_SCL_GPIO_PORT GPIOB
#define I2Cx_SCL_AF GPIO_AF4_I2C1
#define I2Cx_SDA_PIN GPIO_PIN_9
#define I2Cx_SDA_GPIO_PORT GPIOB
#define I2Cx_SDA_AF GPIO_AF4_I2C1
以上代码根据硬件连接,把与EEPROM通讯使用的I2C号、引脚号都以宏封装起来,并且定义了自身的I2C地址及通讯速率,以便配置模式的时候使用。
22.4.2.2.2. 初始化I2C的 GPIO¶
利用上面的宏,编写I2C GPIO引脚的初始化函数,MINI开发板的见 代码清单23_3a,指南者和霸道、拂晓电机开发板的见 代码清单23_3b。
void i2c_CfgGpio(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* Enable GPIO TX/RX clock */
I2Cx_SCL_GPIO_CLK_ENABLE();
I2Cx_SDA_GPIO_CLK_ENABLE();
/* I2C TX GPIO pin configuration */
GPIO_InitStruct.Pin = EEPROM_I2C_SCL_PIN |
EEPROM_I2C_SDA_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(EEPROM_GPIO_PORT_I2C, &GPIO_InitStruct);
/* 给一个停止信号,
复位I2C总线上的所有设备到待机模式 */
i2c_Stop();
}
void HAL_I2C_MspInit(I2C_HandleTypeDef *hi2c)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* ##使能使能外设和GPIO时钟*/
/* 使能GPIO时钟*/
I2Cx_SCL_GPIO_CLK_ENABLE();
I2Cx_SDA_GPIO_CLK_ENABLE();
/*使能 I2C1使能时钟 */
I2Cx_CLK_ENABLE();
/*##配置外设引脚 */
/* I2C TX GPIO配置 */
GPIO_InitStruct.Pin = I2Cx_SCL_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FAST;
GPIO_InitStruct.Alternate = I2Cx_SCL_AF;
HAL_GPIO_Init(I2Cx_SCL_GPIO_PORT, &GPIO_InitStruct);
/* I2C RX GPIO配置 */
GPIO_InitStruct.Pin = I2Cx_SDA_PIN;
GPIO_InitStruct.Alternate = I2Cx_SDA_AF;
HAL_GPIO_Init(I2Cx_SDA_GPIO_PORT, &GPIO_InitStruct);
/*强制I2C外设时钟复位*/
I2Cx_FORCE_RESET() ;
/*释放I2C外设时钟复位*/
I2Cx_RELEASE_RESET();
}
同为外设使用的GPIO引脚初始化,初始化的流程与“串口初始化函数”章节中的类似,主要区别是引脚的模式。函数执行流程如下:
使用GPIO_InitTypeDef定义GPIO初始化结构体变量,以便下面用于存储GPIO配置;
调用宏I2Cx_CLK_ENABLE()使能I2C外设时钟,调用宏定义I2Cx_SCL_GPIO_CLK_ENABLE()和I2Cx_SDA_GPIO_CLK_ENABLE()来使能I2C引脚使用的GPIO端口时钟。
向GPIO初始化结构体赋值,把引脚初始化成复用开漏模式,要注意I2C的引脚必须使用这种模式。
使用以上初始化结构体的配置,调用HAL_GPIO_Init函数向寄存器写入参数,完成GPIO的初始化。
22.4.2.2.3. 配置I2C的模式¶
以上只是配置了I2C所使用的引脚,还不算对I2C模式的配置。
对于MINI开发板,我们要自己手动去模拟I2C通信协议,所以需要编写几个函数去实现I2C的启动、停止、发送单字节、接收单字节、应答、还有延时的功能。 这个便是我们针对于MINI开发板的软件模拟I2C的配置过程。见 代码清单23_4a、 代码清单23_4a_续1 、代码清单23_4a_续2。
而对于指南者和霸道开发板和拂晓电机开发板,与EEPROM芯片相连接的两个I2C引脚是有硬件I2C的,我们可以直接使用HAL库去配置STM32的硬件I2C,非常地方便。见 代码清单23_4b。
软件模拟I2C:起始停止信号及速率配置
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 | /*
************************************************
* 函 数 名: i2c_Delay
* 功能说明: I2C总线位延迟,最快400KHz
* 形 参:无
* 返 回 值: 无
************************************************
*/
static void i2c_Delay(void)
{
uint8_t i;
/*
下面的时间是通过逻辑分析仪测试得到的。
工作条件:CPU主频72MHz ,MDK编译环境,1级优化
循环次数为10时,SCL频率 = 205KHz
循环次数为7时,SCL频率 = 347KHz, SCL高电平时间1.5us,SCL低电平时间2.87us
循环次数为5时,SCL频率 = 421KHz, SCL高电平时间1.25us,SCL低电平时间2.375us
*/
for (i = 0; i < 10; i++);
}
/*
***********************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线启动信号
* 形 参:无
* 返 回 值: 无
***********************************************
*/
void i2c_Start(void)
{
/* 当SCL高电平时,SDA出现一个下跳沿表示I2C总线启动信号 */
EEPROM_I2C_SDA_1();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SDA_0();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
}
/*
***********************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线停止信号
* 形 参:无
* 返 回 值: 无
***********************************************
*/
void i2c_Stop(void)
{
/* 当SCL高电平时,SDA出现一个上跳沿表示I2C总线停止信号 */
EEPROM_I2C_SDA_0();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SDA_1();
}
|
上述代码首先定义了一个i2c_Delay函数,该函数主要用于I2C模拟输出信号电平的延时,如控制SDA输出高电平后调用i2c_Delay延时, 再控制SDA输出低电平,就达到了SDA维持高电平一段时间后切换的效果,而电平切换的延时会影响到I2C时序的通讯速率。在i2c_Delay函数内部, 实际是直接使用了一个无实际操作、纯粹消耗时间的for循环,以此达到延时目的。该延时函数配置的循环次数是个经验值, 在不同的芯片平台或主频不同的情况下,延时的时间会存在差异,我们使用逻辑分析仪测出了i2c_Delay函数在不同情况下对整个模拟I2C时序波特率的影响, 具体的波特率见函数中的注释。
代码中的i2c_Start函数,用于控制SCL、SDA线产生I2C协议的起始信号,它利用“bsp_i2c_gpio.h”文件中的宏控制SDA、SCL线输出高低电平, 而这输出高低电平的逻辑完全与图 起始信号分解图 中解说的I2C协议起始信号的时序一样, 见图 起始信号分解图 对起始信号的分解, 分解后的每个步骤实际就是i2c_Start函数内部对GPIO引脚的操作。
类似地,代码中的i2c_Stop函数用于控制SCL、SDA线产生I2C协议的停止信号, 停止信号的分解见图 停止信号分解图 , i2c_Stop函数就是按该分解步骤控制GPIO的电平逻辑,实现停止信号。
软件模拟I2C:发送和接收一个字节
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 | /*
*************************************************
* 函 数 名: i2c_SendByte
* 功能说明: CPU向I2C总线设备发送8bit数据
* 形 参:_ucByte : 等待发送的字节
* 返 回 值: 无
*************************************************
*/
void i2c_SendByte(uint8_t _ucByte)
{
uint8_t i;
/* 先发送字节的高位bit7 */
for (i = 0; i < 8; i++) {
if (_ucByte & 0x80) {
EEPROM_I2C_SDA_1();
} else {
EEPROM_I2C_SDA_0();
}
i2c_Delay();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SCL_0();
if (i == 7) {
EEPROM_I2C_SDA_1(); // 释放总线
}
_ucByte <<= 1; /* 左移一个bit */
i2c_Delay();
}
}
/*
**********************************************
* 函 数 名: i2c_ReadByte
* 功能说明: CPU从I2C总线设备读取8bit数据
* 形 参:无
* 返 回 值: 读到的数据
**********************************************
*/
uint8_t i2c_ReadByte(void)
{
uint8_t i;
uint8_t value;
/* 读到第1个bit为数据的bit7 */
value = 0;
for (i = 0; i < 8; i++) {
value <<= 1;
EEPROM_I2C_SCL_1();
i2c_Delay();
if (EEPROM_I2C_SDA_READ()) {
value++;
}
EEPROM_I2C_SCL_0();
i2c_Delay();
}
return value;
}
|
I2C通讯的主体是收发数据,实现时主要是根据I2C协议数据有效性的要求, 读取或控制SDA信号线的电平,见 上述的代码。
以发送函数i2c_SendByte为例,该函数以其输入参数作为要使用I2C协议输出的数据,该数据大小为一字节。 函数的主体是一个8次的for循环,循环体执行一次将会对外发送一个数据位,循环结束时刚好发送完该字节数据。
循环体每位数据的发送逻辑见图 数据有效性分解图 ,步骤分解如下:
(1) 程序对输入参数_ucByte和0x80“与”运算, 判断其最高位的逻辑值,为1时控制SDA输出高电平,为0则控制SDA输出低电平;
(2) 延时,以此保证SDA线输出的电平已稳定, 再进行后续操作;
(3) 控制SCL线产生高低电平跳变, 也就是产生I2C协议中SCL线的通讯时钟;
(4) 在SCL线高低电平之间有个延时,该延时期间SCL线维持高电平, 根据I2C协议,此时数据有效,通讯的另一方会在此时读取SDA线的电平逻辑,高电平时接收到该位为数据1,否则为0;
(5) 一次循环体执行结束, _ucByte左移一位以便下次循环发送下一位的数据;
(6) 如次循环8次,把_ucByte中的8位个数据位发送完毕,在最后一位发送完成后(此时循环计数器i=7), 控制SDA线输出1(即高阻态),也就是说发送方释放SDA总线,等待接收方的应答信号;
(7) 本驱动程序中,检测应答信号由另一个独立函数i2c_WaitAck完成(后面再分析), 此处释放SDA总线后直接退出循环和函数。
i2c_ReadByte函数的控制过程刚好反过来,不过由于本程序STM32都是作为I2C协议的通讯主机,所以SCL线的时钟信号依然是由STM32来控制产生的, 即图 数据有效性分解图 中的SDA线将由另一端的发送方控制, STM32控制SCL产生通讯时钟,并在数据有效时读取SDA线的信号获得数据。
i2c_ReadByte函数也是以for循环为主体,循环体会被执行8次,执行完毕后将会接收到一个字节的数据,循环体接收数据的流程如下:
(1) 使用一个变量value暂存要接收的数据,每次循环开始前先对value的值左移1位, 以给value变量的bit0腾出空间,bit0将用于缓存最新接收到的数据位,一位一位地接收并移位,最后拼出完整的8位数据;
(2) 控制SCL线进行高低电平切换, 输出I2C协议通讯用的时钟;
(3) 在SCL线高低电平切换之间,有个延时,该延时确保给予了足够的时间让数据发送方进行处理, 即发送方在SCL时钟驱动下通过SDA信号线发出电平逻辑信号,而这个延时之后,作为数据接收端的STM32使用宏EEPROM_I2C_SDA_READ读取SDA信号线的电平, 若信号线为1,则value++,即把它的bit0置1,否则不操作(这样该位将保持为0),这样就读取到了一位的数据;
(4) SCL线切换成低电平后,加入延时, 以便接收端根据需要切换SDA线输出数据;
(5) 循环结束后,value变量中包含有1个字节数据, 使用return把它作为函数返回值返回;
(6) 本驱动程序中,作为接收端回复发送端的应答和非应答信号由i2c_Ack及i2c_NAck函数完成(后面再分析), 此处接收完8位数据后直接返回数据退出函数。
软件模拟I2C:响应处理及返回
一次基本的I2C协议通讯过程包含起始信号、收或发8个数据位的数据、1个数据位的响应以及结束信号信号组成, 这些环节中剩下最后的响应处理及返回将由下面的代码完成。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 | /*
*************************************************
* 函 数 名: i2c_WaitAck
* 功能说明:
CPU产生一个时钟,并读取器件的ACK应答信号
* 形 参:无
* 返 回 值: 返回0表示正确应答,1表示无器件响应
*************************************************
*/
uint8_t i2c_WaitAck(void)
{
uint8_t re;
EEPROM_I2C_SDA_1(); /* CPU释放SDA总线 */
i2c_Delay();
EEPROM_I2C_SCL_1(); /* CPU驱动SCL = 1,
此时器件会返回ACK应答 */
i2c_Delay();
if (EEPROM_I2C_SDA_READ()) { /* CPU读取SDA口线状态 */
re = 1;
} else {
re = 0;
}
EEPROM_I2C_SCL_0();
i2c_Delay();
return re;
}
/*
************************************************
* 函 数 名: i2c_Ack
* 功能说明: CPU产生一个ACK信号
* 形 参:无
* 返 回 值: 无
************************************************
*/
void i2c_Ack(void)
{
EEPROM_I2C_SDA_0(); /* CPU驱动SDA = 0 */
i2c_Delay();
EEPROM_I2C_SCL_1(); /* CPU产生1个时钟 */
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
EEPROM_I2C_SDA_1(); /* CPU释放SDA总线 */
}
/*
**********************************************
* 函 数 名: i2c_NAck
* 功能说明: CPU产生1个NACK信号
* 形 参:无
* 返 回 值: 无
**********************************************
*/
void i2c_NAck(void)
{
EEPROM_I2C_SDA_1(); /* CPU驱动SDA = 1 */
i2c_Delay();
EEPROM_I2C_SCL_1(); /* CPU产生1个时钟 */
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
}
|
阅读下面的解释时请配合前面的 图23_8 响应与非响应信号 来理解,该图描述了I2C协议的响应信号时序。
首先是i2c_WaitAck函数,该函数用于STM32作为发送方时,等待及处理接收方传来的响应或非响应信号, 即一般调用前面的i2c_SendByte函数后,再调用本函数检测响应。函数的实现如下:
STM32控制SDA信号线输出高阻态,释放它对SDA的控制权,由接收方控制;
(2) 控制SCL信号线切换高低电平,产生一个时钟信号,根据I2C协议,此时接收方若把SDA设置为低电平, 就表示返回一个“应答”信号,若SDA保持为高电平,则表示返回一个“非应答 ”信号;
(3) 在SCL切换高低电平之间,有个延时确保给予了足够的时间让接收方返回应答信号, 延时后使用宏EEPROM_I2C_SDA_READ读取SDA线的电平,根据电平值赋予re变量的值;
函数的最后返回re的值,接收到响应时返回0,未接收到响应时返回1。
当STM32作为数据接收端,调用i2c_ReadByte函数后,需要给发送端返回应答或非应答信号, 此时可使用i2c_Ack及i2c_Nack函数处理,该处理与i2c_WaitAck函数相反,此时SDA线也由STM32控制,说明如下:
(1) 根据要返回“应答”还是“非应答”信号,先准备好SDA线的电平,i2c_Ack函数中把SDA线设置为低电平, 表示“应答”信号,i2c_Nack函数中把SDA线设置为高电平,表示“非应答”信号;
(2) 控制SCL线进行高低电平切换,产生一个时钟信号,在SCL线的高低电平之间加入一个延时, 确保有足够的时间让通讯的另一方接收到SDA信号线的电平;
(3) 在i2c_Ack函数的末尾,响应信号发送结束后, 重新把SDA线设置为高电平以释放总线的控制权,方便后续的通讯。
以上就是软件模拟I2C协议的各个环节,可以看到,各个环节都是配合延时,使用内核直接控制SDA、SCL信号线GPIO的电平逻辑, 产生符合I2C通讯协议的时序。若使用STM32的硬件I2C,初始化I2C外设后,调用库函数设置I2C外设的寄存器位即可产生以上各环节的起始、停止、 应答及非应答信号,收发数据时也可以直接通过读写I2C的数据寄存器完成,相对而言减轻了内核的负担。
到这里,我们就完成了在MINI开发板上实现的软件模拟I2C。
下面是对指南者和霸道开发板、拂晓电机开发板使用HAL库对I2C模式的配置。
/**
* @brief I2C 工作模式配置
* @param 无
* @retval 无
*/
static void I2C_Mode_Config(void)
{
I2C_Handle.Instance = I2Cx;
I2C_Handle.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
I2C_Handle.Init.ClockSpeed = 400000;
I2C_Handle.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
I2C_Handle.Init.DutyCycle = I2C_DUTYCYCLE_2;
I2C_Handle.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
I2C_Handle.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
I2C_Handle.Init.OwnAddress1 = I2C_OWN_ADDRESS7 ;
I2C_Handle.Init.OwnAddress2 = 0;
/* Init the I2C */
HAL_I2C_Init(&I2C_Handle);
//HAL_I2CEx_AnalogFilter_Config(&I2C_Handle, I2C_ANALOGFILTER_ENABLE);
}
/**
* @brief I2C 外设(EEPROM)初始化
* @param 无
* @retval 无
*/
void I2C_EE_Init(void)
{
I2C_Mode_Config();
}
熟悉STM32 I2C结构的话,这段初始化程序就十分好理解了,指定连接EEPROM的I2C为EEPROM_I2C这里是I2C4, 时序配置为上面用工具计算出来的值,自身地址为0,地址设置为7bit模式,关闭双地址模式,自身地址2也为0,禁止通用广播模式,禁止时钟延长模式。 最后调用库函数HAL_I2C_Init把这些配置写入寄存器。
为方便调用,我们把I2C的GPIO及模式配置都用I2C_EE_Init函数封装起来。
22.4.2.2.4. 向EEPROM写入一个字节的数据¶
初始化好I2C外设后,就可以使用I2C通讯了,我们看看如何向EEPROM写入一个字节的数据, 对于MINI开发板,见 代码清单23_5a,对于指南者和霸道开发板和拂晓电机开发板,见 代码清单23_5b。
检测EEPROM的响应及单字节写入
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 | /**bsp_i2c_ee.h文件**/
/* 24xx02的设备地址 */
#define EEPROM_DEV_ADDR 0xA0
/**bsp_i2c_gpio.h文件**/
#define EEPROM_I2C_WR 0 /* 写控制bit */
#define EEPROM_I2C_RD 1 /* 读控制bit */
/**bsp_i2c_ee.c文件**/
/*
***************************************************
* 函 数 名: i2c_CheckDevice
* 功能说明: 检测I2C总线设备,CPU向发送设备地址,
然后读取设备应答来判断该设备是否存在
* 形 参:_Address:设备的I2C总线地址
* 返 回 值: 返回值 0 表示正确, 返回1表示未探测到
***************************************************
*/
uint8_t ee_CheckDevice(uint8_t _Address)
{
uint8_t ucAck;
i2c_Start(); /* 发送启动信号 */
/* 发送设备地址+读写控制bit(0 = w, 1 = r) bit7
先传 */
i2c_SendByte(_Address | EEPROM_I2C_WR);
ucAck = i2c_WaitAck(); /* 检测设备的ACK应答 */
i2c_Stop(); /* 发送停止信号 */
return ucAck;
}
|
以上代码涉及到几个宏,首先是EEPROM_DEV_ADDR(宏值为0XA0), 这是EERPOM的设备地址,该地址与EEPROM的硬件接法有关, 可参考前面图 图23_13 EEPROM设备地址 中的说明理解, 此设备地址是一个8位写地址,即bit0代表写方向。在应用时, 一般还与下面的宏EEPROM_I2C_WR(宏值为0)及EEPROM_I2C_RD(宏值为1)配合,如“EEPROM_DEV_ADDR | EEPROM_I2C_WR”这个或运算仍然表示8位的写方向地址(运算结果的bit0=0), 而“EEPROM_DEV_ADDR | EEPROM_I2C_RD”则用来表示8位的读方向地址(运算结果的bit0=1)。
这段做代码的核心是ee_CheckDevice函数,它接收一个_Address参数作为要访问的设备地址,其函数内部过程如下:
(1) 使用i2c_Start函数产生一个I2C起始信号;
(2) 调用i2c_SendByte函数把设备地址_Address发送出去,发送时使用宏EEPROM_I2C_WR与_Address作“或”运算, 表示它向I2C总线上广播寻找地址为_Address的设备,若总线上有该设备且工作正常,该设备将按照I2C协议返回一个应答信号;
(3) 调用i2c_WaitAck函数检测应答信号, 若检测到,说明EEPROM工作正常;
(4) 检测响应后调用i2c_Stop发送停止信号, 结束本次通讯;
(5) 把响应结果作为EEPROM检测结果返回, 为0时表示EEPROM正常,为1表示异常。
这个函数实现的过程其实是下图 EEPROM单字节写入时序 中的一部分, 该图展示了如何向ERPOM写入一个字节的数据,此处我们仅使用了开头发送设备地址的一段,主要是为了获取EEPROM响应以判断EEPROM是否正常, 不需要后续的数据写入过程,所以在响应之后就发送结束信号关闭此次通讯。
在完整的单字节写入通讯过程中,I2C主机(此处为STM32)发送的第1个字节为EEPROM的设备地址,用于从I2C总线上的众多设备中寻找到EEPROM, 得到EEPROM的响应后,再发送第2个字节,当EEPROM接收到这个字节后, 会把它理解成将要写入的EEPROM内存地址(即EEPROM内部的0-255个存储单元,它指定要存储在哪),第3个字节是要写入的数据内容。
对于STM32来说,无论是EEPROM的设备地址、内存地址还是要写入的数据,都是一个数值而已,本质都是一样的。 它们都可使用i2c_SendByte函数一个字节一个字节地发送出去,而在EEPROM端,对数值的解释不同,它就分别代表了设备地址、内存地址及要写入的数据。
关于EEPROM的单字节写入,由于它比后面要介绍的“页写入”效率要低得多,所以在本工程中都使用“页写入”函数来代替,就没有编写专门的单字节写入的代码了。
/**
* @brief 写一个字节到I2C EEPROM中
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @retval 无
*/
uint32_t I2C_EE_ByteWrite(uint8_t* pBuffer, uint8_t WriteAddr)
{
HAL_StatusTypeDef status = HAL_OK;
status = HAL_I2C_Mem_Write(&I2C_Handle, EEPROM_ADDRESS, (uint16_t)
WriteAddr, I2C_MEMADD_SIZE_8BIT, pBuffer, 1, 100);
/* Check the communication status */
if (status != HAL_OK) {
/* Execute user timeout callback */
//I2Cx_Error(Addr);
}
while (HAL_I2C_GetState(&I2C_Handle) != HAL_I2C_STATE_READY) {
}
/* Check if the EEPROM is ready for a new operation */
while (HAL_I2C_IsDeviceReady(&I2C_Handle, EEPROM_ADDRESS,
EEPROM_MAX_TRIALS, I2Cx_TIMEOUT_MAX) == HAL_TIMEOUT);
/* Wait for the end of the transfer */
while (HAL_I2C_GetState(&I2C_Handle) != HAL_I2C_STATE_READY) {
}
return status;
}
这里我们只是简单调用库函数HAL_I2C_Mem_Write就可以实现,通过封装一次使用更方。
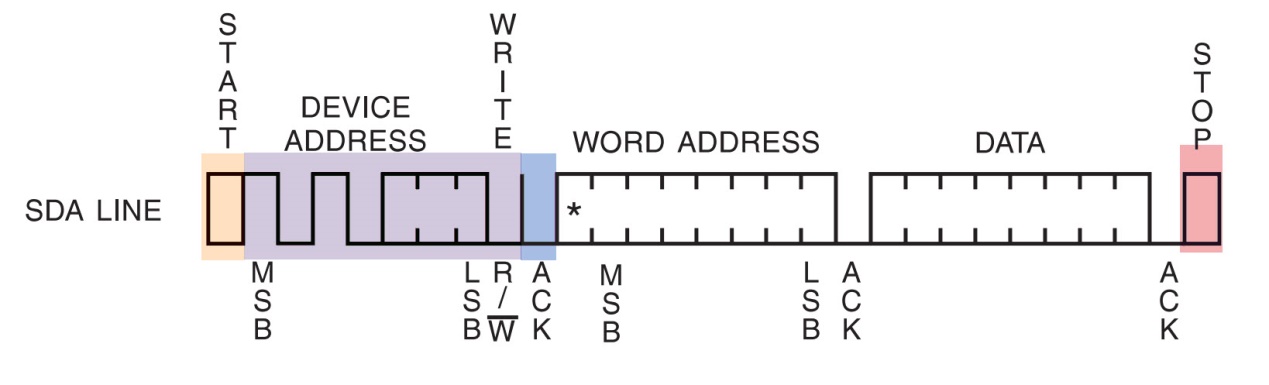
在这个通讯过程中,STM32实际上通过I2C向EEPROM发送了两个数据, 但为何第一个数据被解释为EEPROM的内存地址? 这是由EEPROM的自己定义的单字节写入时序,见 图23_14.
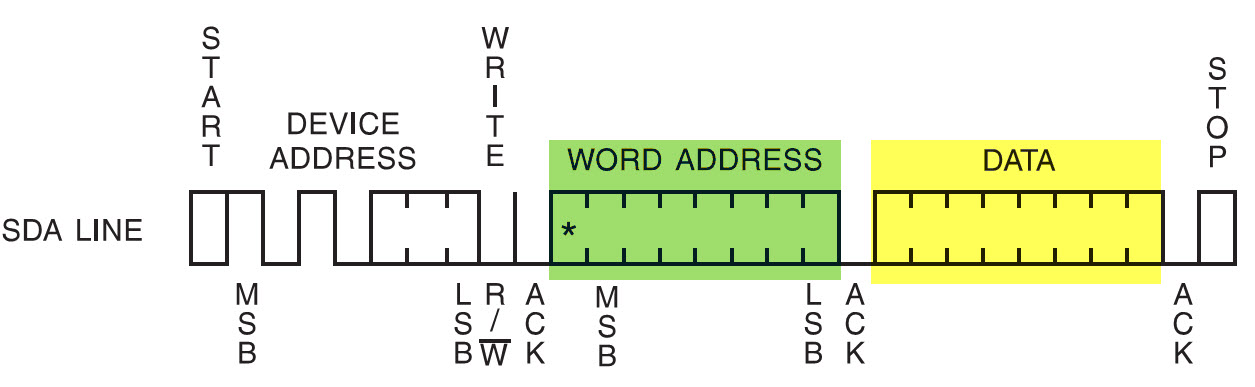
图 23‑14 EEPROM单字节写入时序(摘自《AT24C02》规格书)
EEPROM的单字节时序规定,向它写入数据的时候,第一个字节为内存地址,第二个字节是要写入的数据内容。所以我们需要理解:命令、地址的本质都是数据,对数据的解释不同,它就有了不同的功能。
22.4.2.2.5. EEPROM的页写入¶
在以上的数据通讯中,每写入一个数据都需要向EEPROM发送写入的地址,我们希望向连续地址写入多个数据的时候,只要告诉EEPROM第一个内存地址address1,后面的数据按次序写入到address2、address3… 这样可以节省通讯的内容,加快速度。为应对这种需求,EEPROM定义了一种页写入时序,见 图23_15。
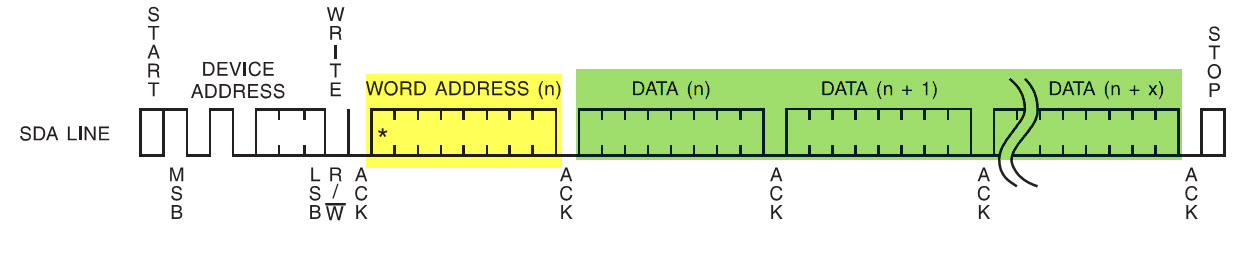
图 23‑15 EEPROM页写入时序(摘自《AT24C02》规格书)
根据页写入时序,第一个数据被解释为要写入的内存地址address1,后续可连续发送n个数据, 这些数据会依次写入到内存中。其中AT24C02型号的芯片页写入时序最多可以一次发送8个数据(即n = 8 ),该值也称为页大小,某些型号的芯片每个页写入时序最多可传输16个数据。
EEPROM的页写入代码实现,对于MINI开发板,见 代码清单23_6a,对于指南者和霸道开发板、拂晓电机开发板,见 代码清单23_6b。
EEPROM的页写入及状态等待
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 | /*bsp_i2c_ee.h文件*/
/* 24xx02的页面大小 */
#define EEPROM_PAGE_SIZE 8
/*bsp_i2c_ee.c文件*/
/*
****************************************************
* 函 数 名: ee_WaitStandby
* 功能说明: 等待EEPROM到准备状态,在写入数据后,必须调用本函数
写入操作时,使用I2C把数据传输到EEPROM后,
EEPROM会向内部空间写入数据需要一定的时间,
当EEPROM内部写入完成后会对I2C的设备寻址有响应,
调用本函数可等待至EEPROM内部时序写入完毕
* 形 参:无
* 返 回 值: 0表示正常,1表示等待超时
****************************************************
*/
uint8_t ee_WaitStandby(void)
{
uint32_t wait_count = 0;
while (ee_CheckDevice(EEPROM_DEV_ADDR)) {
//若检测超过次数,退出循环
if (wait_count++>0xFFFF) {
//等待超时
return 1;
}
}
//等待完成
return 0;
}
/*
****************************************************
* 函 数 名: ee_WriteBytes
* 功能说明: 向串行EEPROM指定地址写入若干数据,采用页写操作提高写入效率
* 形 参:_usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pWriteBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
****************************************************
*/
uint8_t ee_WriteBytes(uint8_t *_pWriteBuf, uint16_t _usAddress,
uint16_t _usSize)
{
uint16_t i,m;
uint16_t usAddr;
/*
写串行EEPROM不像读操作可以连续读取很多字节,每次写操作只能在同一个page。
对于24xx02,page size = 8
简单的处理方法为:按字节写操作模式,每写1个字节,都发送地址
为了提高连续写的效率: 本函数采用page wirte操作。
*/
usAddr = _usAddress;
for (i = 0; i < _usSize; i++) {
/* 当发送第1个字节或是页面首地址时,需要重新发起启动信号和地址 */
if ((i == 0) || (usAddr & (EEPROM_PAGE_SIZE - 1)) == 0) {
/* 第0步:发停止信号,结束上一页的通讯,准备下一次通讯 */
i2c_Stop();
/* 通过检查器件应答的方式,判断内部写操作是否完成,一般小于 10ms
CLK频率为200KHz时,查询次数为30次左右
原理同 ee_WaitStandby 函数,但该函数检查完成后会产生停止信号,
不适用于此处*/
for (m = 0; m < 1000; m++) {
/* 第1步:发起I2C总线启动信号 */
i2c_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
i2c_SendByte(EEPROM_DEV_ADDR | EEPROM_I2C_WR); /* 此处是写指令 */
/* 第3步:发送一个时钟,判断器件是否正确应答 */
if (i2c_WaitAck() == 0) {
break;
}
}
if (m == 1000) {
goto cmd_fail; /* EEPROM器件写超时 */
}
/* 第4步:发送字节地址,24C02只有256字节,因此1个字节就够了,
如果是24C04以上,那么此处需要连发多个地址 */
i2c_SendByte((uint8_t)usAddr);
/* 第5步:等待ACK */
if (i2c_WaitAck() != 0) {
goto cmd_fail; /* EEPROM器件无应答 */
}
}
/* 第6步:开始写入数据 */
i2c_SendByte(_pWriteBuf[i]);
/* 第7步:发送ACK */
if (i2c_WaitAck() != 0) {
goto cmd_fail; /* EEPROM器件无应答 */
}
usAddr++; /* 地址增1 */
}
/* 命令执行成功,发送I2C总线停止信号 */
i2c_Stop();
//等待最后一次EEPROM内部写入完成
if (ee_WaitStandby() == 1)
goto cmd_fail;
return 1;
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
i2c_Stop();
return 0;
}
|
这段代码中包含了一个ee_WaitStandby函数,它的作用是等待EEPROM准备就绪。当EEPROM接收完STM32传来要写入的数据后(即一次I2C通讯完毕), 它会启动内部时序,往存储单元内写入接收到的数据,而这个过程需要花费一点时间,在此期间EEPROM不会响应外部的任何I2C信号, 所以下一次操作前需要确保EEPROM内部写入时序完成。ee_WaitStandby函数就实现了这样的功能,它直接循环调用ee_CheckDevice函数, 前面已经讲解了ee_CheckDevice函数的功能是发送EEPROM设备地址然后检查响应,所以此处实质是循环等待直至获取到EEPROM的响应信号, 或检测超过次数认为响应失败,一旦获取到EEPROM的响应即可认为它的内部写入时序完成,可以进行后续操作。
接下来分析ee_WriteBytes函数,它接收三个输入参数:_pWriteBuf、_usAddress和_usSize分别表示要存储到EEPROM的数据, 要存储到EEPROM的存储单元起始地址及要存储多少个数据,函数的执行流程如下:
(1) 整个函数的操作主要由第58行的for循环完成, 它循环_usSize次,即有多少个要发送的数据它就执行多少次, 每次循环会发送一个字节的数据;
(2) 由于本函数采用的是页写入方式,一个发送过程最多可以发送8个字节的数据, 所以每发送8个数据后发送一次起始信号、设备地址及内存地址即可,第60行的if就是作这样的判断,每发送完一页数据EEPROM_PAGE_SIZE(8个字节), 那么条件成立,执行第60-90行的if分支;
(3) 在这个分支中,先调用i2c_Stop函数, 结束上一次的页写入过程,准备下一次通讯;
(4) 在第68行的for循环,使用i2c_Start、i2c_SendByte及i2c_WaitAck函数产生新的一次起始信号、 对EEPROM设备寻址并检测EEPROM是否有响应, 若有响应跳出这个循环,若尝试了1000次还没接收到响应则认为EEPROM寻址超时,可能存在硬件错误, 使用goto跳转到函数尾的错误处理并退出函数。此处使用for循环跟前面等待EEPROM内部写入时序完成的ee_WaitStandby函数思路是一样的, 它等待至上一次写入完成后才进行下次的操作,不直接调用ee_WaitStandby函数是因为该函数检测后会发送I2C停止信号,而此处希望等待完成后进行后续的页写入操作;
(5) 若检测到EEPROM响应,本函数将执行到第86行, 这里调用i2c_SendByte函数发送将要写入的EEPROM内部存储单元地址,发送后检查应答;
(6) 若一切顺利,就可以开始发送数据了,程序执行到第95行, 注意这里的代码已经不属于前面第60行if语句每8个数据执行一次的条件执行区域了,所以这个i2c_SendByte将在每个循环执行一次, 它把输入参数_pWriteBuf存储的数据通过I2C协议发送出去,而EEPROM也将把这些数值写入到对应的存储单元中;
(7) 第102行的usAddr地址变量自增1,该变量参与到前面第60行if语句判断中, 每8个循环执行一次,并把该地址发送给EEPORM;
(8) 第106行,已经退出发送数据循环,所有数据已经发送完成, 这里调用i2c_Stop结束最后一次页写入;
(9) 第109行,调用ee_WaitStandby函数等待最后一次页写入操作的内部时序完成, 防止调用本函数后用户立刻执行其它EEPROM操作时无响应,等待结束后使用return退出函数;
(10) 第114行是标号cmd_fail的处理,前面写入过程产生各种错误后都跳转至此处, 调用i2c_Stop函数发送停止信号,释放I2C总线,然后使用return退出函数。
/**
* @brief 在EEPROM的一个写循环中可以写多个字节,但一次写入的字节数
* 不能超过EEPROM页的大小,AT24C02每页有8个字节
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @arg NumByteToWrite:写的字节数
* @retval 无
*/
uint32_t I2C_EE_PageWrite(uint8_t* pBuffer, uint8_t WriteAddr,
uint8_t NumByteToWrite)
{
HAL_StatusTypeDef status = HAL_OK;
/* Write EEPROM_PAGESIZE */
status=HAL_I2C_Mem_Write(&I2C_Handle, EEPROM_ADDRESS,WriteAddr,
I2C_MEMADD_SIZE_8BIT, (uint8_t*)(pBuffer),NumByteToWrite, 100);
while (HAL_I2C_GetState(&I2C_Handle) != HAL_I2C_STATE_READY) {
}
/* Check if the EEPROM is ready for a new operation */
while (HAL_I2C_IsDeviceReady(&I2C_Handle, EEPROM_ADDRESS,
EEPROM_MAX_TRIALS, I2Cx_TIMEOUT_MAX) == HAL_TIMEOUT);
/* Wait for the end of the transfer */
while (HAL_I2C_GetState(&I2C_Handle) != HAL_I2C_STATE_READY) {
}
return status;
}
这段页写入函数主体跟单字节写入函数是一样的,只是它在发送数据的时候,使用while循环控制发送多个数据,发送完多个数据后才产生I2C停止信号,只要每次传输的数据小于等于EEPROM时序规定的页大小,就能正常传输。
22.4.2.2.6. 多字节写入¶
多次写入数据时,利用EEPROM的页写入方式,避免单字节读写时候的等待。多个数据写入过程 见 代码清单23_7。
/**
* @brief 将缓冲区中的数据写到I2C EEPROM中
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @arg NumByteToWrite:写的字节数
* @retval 无
*/
void I2C_EE_BufferWrite(uint8_t* pBuffer, uint8_t WriteAddr,
uint16_t NumByteToWrite)
{
uint8_t NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0;
Addr = WriteAddr % EEPROM_PAGESIZE;
count = EEPROM_PAGESIZE - Addr;
NumOfPage = NumByteToWrite / EEPROM_PAGESIZE;
NumOfSingle = NumByteToWrite % EEPROM_PAGESIZE;
/* If WriteAddr is I2C_PageSize aligned */
if (Addr == 0) {
/* If NumByteToWrite < I2C_PageSize */
if(NumByteToWrite <= count)
{
I2C_EE_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
/* If NumByteToWrite > I2C_PageSize */
else {
while (NumOfPage--) {
I2C_EE_PageWrite(pBuffer, WriteAddr, EEPROM_PAGESIZE);
WriteAddr += EEPROM_PAGESIZE;
pBuffer += EEPROM_PAGESIZE;
}
if (NumOfSingle!=0) {
I2C_EE_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
}
/* If WriteAddr is not I2C_PageSize aligned */
else {
/* If NumByteToWrite < I2C_PageSize */
if (NumOfPage== 0) {
I2C_EE_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
/* If NumByteToWrite > I2C_PageSize */
else {
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / EEPROM_PAGESIZE;
NumOfSingle = NumByteToWrite % EEPROM_PAGESIZE;
if (count != 0) {
I2C_EE_PageWrite(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
}
while (NumOfPage--) {
I2C_EE_PageWrite(pBuffer, WriteAddr, EEPROM_PAGESIZE);
WriteAddr += EEPROM_PAGESIZE;
pBuffer += EEPROM_PAGESIZE;
}
if (NumOfSingle != 0) {
I2C_EE_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
}
}
很多读者觉得这段代码的运算很复杂,看不懂,其实它的主旨就是对输入的数据进行分页(本型号芯片每页8个字节),见表 23‑2。通过“整除”计算要写入的数据NumByteToWrite能写满多少“完整的页”,计算得的值存储在NumOfPage中,但有时数据不是刚好能写满完整页的,会多一点出来,通过“求余”计算得出“不满一页的数据个数”就存储在NumOfSingle中。计算后通过按页传输NumOfPage次整页数据及最后的NumOfSing个数据,使用页传输,比之前的单个字节数据传输要快很多。
除了基本的分页传输,还要考虑首地址的问题,见表 23‑3。若首地址不是刚好对齐到页的首地址,会需要一个count值,用于存储从该首地址开始写满该地址所在的页,还能写多少个数据。实际传输时,先把这部分count个数据先写入,填满该页,然后把剩余的数据(NumByteToWrite-count),再重复上述求出NumOPage及NumOfSingle的过程,按页传输到EEPROM。
若writeAddress=16,计算得Addr=16%8= 0 ,count=8-0= 8;
同时,若NumOfPage=22,计算得NumOfPage=22/8= 2,NumOfSingle=22%8= 6。
数据传输情况如表 23‑2
表 23‑2 首地址对齐到页时的情况
不影响 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
不影响 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
第1页 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
第2页 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
NumOfSingle=6 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
若writeAddress=17,计算得Addr=17%8= 1,count=8-1= 7;
同时,若NumOfPage=22,
先把count去掉,特殊处理,计算得新的NumOfPage=22-7= 15
计算得NumOfPage=15/8= 1,NumOfSingle=15%8= 7。
数据传输情况如表 23‑3
表 23‑3 首地址未对齐到页时的情况
不影响 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
不影响 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
count=7 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
第1页 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
NumOfSingle=7 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
最后,强调一下,EEPROM支持的页写入只是一种加速的I2C的传输时序,实际上并不要求每次都以页为单位进行读写,EEPROM是支持随机访问的(直接读写任意一个地址),如前面的单个字节写入。在某些存储器,如NAND FLASH,它是必须按照Block写入的,例如每个Block为512或4096字节,数据写入的最小单位是Block,写入前都需要擦除整个Block;NOR FLASH则是写入前必须以Sector/Block为单位擦除,然后才可以按字节写入。而我们的EEPROM数据写入和擦除的最小单位是“字节”而不是“页”,数据写入前不需要擦除整页。
22.4.2.2.7. 从EEPROM读取数据¶
从EEPROM读取数据是一个复合的I2C时序,它实际上包含一个写过程和一个读过程, 见 图23_16。
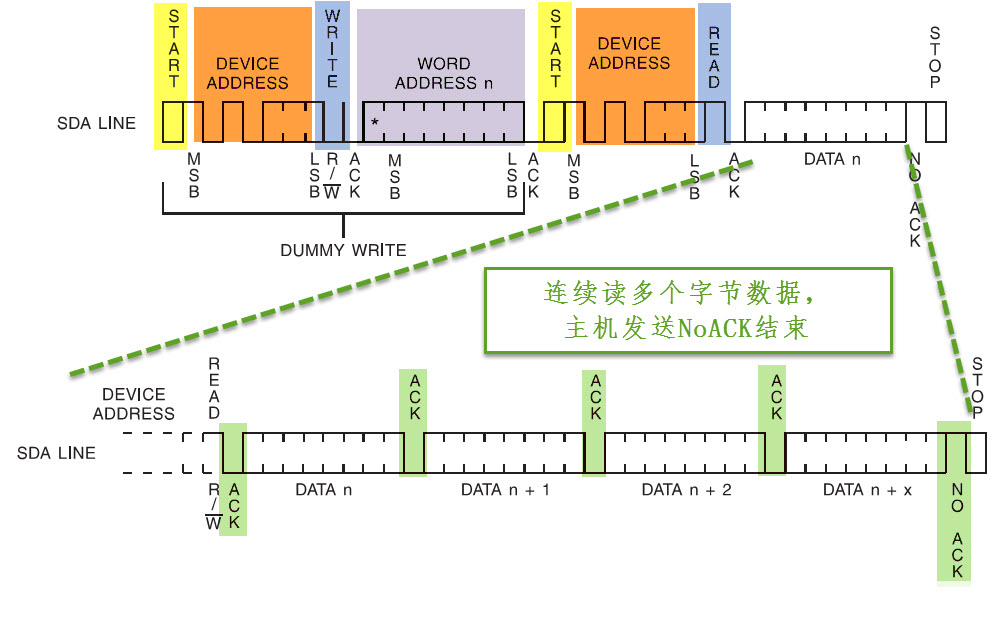
图 23‑16 EEPROM数据读取时序
读时序的第一个通讯过程中,使用I2C发送设备地址寻址(写方向),接着发送要读取的“内存地址”;第二个通讯过程中, 再次使用I2C发送设备地址寻址,但这个时候的数据方向是读方向;在这个过程之后,EEPROM会向主机返回从“内存地址”开始的数据, 一个字节一个字节地传输,只要主机的响应为“应答信号”,它就会一直传输下去,主机想结束传输时,就发送“非应答信号”, 并以“停止信号”结束通讯,作为从机的EEPROM也会停止传输。HAL库已经帮我们实现了这一个过程, 我们只是简单封装一下就可以直接使用,实现代码对于MINI开发板,见 代码清单23_8a,对于指南者和霸道开发板、拂晓电机开发板,见 代码清单23_8b。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 | /*
****************************************************
* 函 数 名: ee_ReadBytes
* 功能说明: 从串行EEPROM指定地址处开始读取若干数据
* 形 参:_usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pReadBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
****************************************************
*/
uint8_t ee_ReadBytes(uint8_t *_pReadBuf, uint16_t _usAddress,
uint16_t _usSize)
{
uint16_t i;
/* 采用串行EEPROM随即读取指令序列,连续读取若干字节 */
/* 第1步:发起I2C总线启动信号 */
i2c_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
i2c_SendByte(EEPROM_DEV_ADDR | EEPROM_I2C_WR); /* 此处是写方向 */
/* 第3步:等待ACK */
if (i2c_WaitAck() != 0) {
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址,24C02只有256字节,因此1个字节就够了,
如果是24C04以上,那么此处需要连发多个地址 */
i2c_SendByte((uint8_t)_usAddress);
/* 第5步:等待ACK */
if (i2c_WaitAck() != 0) {
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。
前面的代码的目的向EEPROM传送地址,下面开始读取数据 */
i2c_Start();
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,
0表示写,1表示读 */
i2c_SendByte(EEPROM_DEV_ADDR | EEPROM_I2C_RD); /* 此处是读指令 */
/* 第8步:发送ACK */
if (i2c_WaitAck() != 0) {
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第9步:循环读取数据 */
for (i = 0; i < _usSize; i++) {
_pReadBuf[i] = i2c_ReadByte(); /* 读1个字节 */
/* 每读完1个字节后,需要发送Ack, 最后一个字节不需要Ack,发Nack */
if (i != _usSize - 1) {
i2c_Ack(); /* 中间字节读完后,CPU产生ACK信号(驱动SDA = 0) */
} else {
i2c_NAck(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1)
}
}
/* 发送I2C总线停止信号 */
i2c_Stop();
return 1; /* 执行成功 */
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
i2c_Stop();
return 0;
}
|
这段读取EEPROM内容的ee_ReadBytes函数写过程跟前面的写入函数类似:
产生第一次起始信号,并发送EEPROM设备地址,地址中的bit0表示写方向;
接收到应答后,向EEPROM发送要读取的存储单元地址;
(3) 接收到应答后,产生第二次起始信号,发送EEPROM的设备地址, 地址中的bit0表示读方向,注意两次起始信号间没有停止信号, 这依然是同一次通讯过程;
在for循环中,连续调用i2c_ReadByte函数一个字节一个字节地接收EEPROM返回的数据内容并存储到数组中;
接收到足够的数据后,产生停止信号,退出函数。
/**
* @brief 从EEPROM里面读取一块数据
* @param
* @arg pBuffer:存放从EEPROM读取的数据的缓冲区指针
* @arg WriteAddr:接收数据的EEPROM的地址
* @arg NumByteToWrite:要从EEPROM读取的字节数
* @retval 无
*/
uint32_t I2C_EE_BufferRead(uint8_t* pBuffer, uint8_t ReadAddr, uint16_t NumByteToRead)
{
HAL_StatusTypeDef status = HAL_OK;
status=HAL_I2C_Mem_Read(&I2C_Handle,EEPROM_ADDRESS,ReadAddr,
I2C_MEMADD_SIZE_8BIT, (uint8_t *)pBuffer, NumByteToRead, 1000);
return status;
}
这里代码非常简单,我们只需要确定I2C的地址,数据格式,数据存储指针,数据大小,超时设置就可以把想要的数据读回来。
22.4.2.3. main文件¶
22.4.2.3.1. EEPROM读写测试函数¶
完成基本的读写函数后,接下来我们编写一个读写测试函数来检验驱动程序。 对于MINI开发板,见 代码清单23_9a,对于指南者和霸道开发板、拂晓电机开发板,见 代码清单23_9b。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 | /*
* eeprom AT24C02 读写测试
* 正常返回1,异常返回0
*/
uint8_t ee_Test(void)
{
uint16_t i;
uint8_t write_buf[EEPROM_SIZE];
uint8_t read_buf[EEPROM_SIZE];
/*----------------------------------------------------*/
if (ee_CheckDevice(EEPROM_DEV_ADDR) == 1) {
/* 没有检测到EEPROM */
printf("没有检测到串行EEPROM!\r\n");
return 0;
}
/*----------------------------------------------------*/
/* 填充测试缓冲区 */
for (i = 0; i < EEPROM_SIZE; i++) {
write_buf[i] = i;
}
/*----------------------------------------------------*/
if (ee_WriteBytes(write_buf, 0, EEPROM_SIZE) == 0) {
printf("写eeprom出错!\r\n");
return 0;
} else {
printf("写eeprom成功!\r\n");
}
/*----------------------------------------------------*/
if (ee_ReadBytes(read_buf, 0, EEPROM_SIZE) == 0) {
printf("读eeprom出错!\r\n");
return 0;
} else {
printf("读eeprom成功,数据如下:\r\n");
}
/*----------------------------------------------------*/
for (i = 0; i < EEPROM_SIZE; i++) {
if (read_buf[i] != write_buf[i]) {
printf("0x%02X ", read_buf[i]);
printf("错误:EEPROM读出与写入的数据不一致");
return 0;
}
printf(" %02X", read_buf[i]);
if ((i & 15) == 15) {
printf("\r\n");
}
}
printf("eeprom读写测试成功\r\n");
return 1;
}
|
在这个测试函数中先调用了ee_CheckDevice函数检测EEPROM的响应,通过是否接收到响应来判断EEPROM是否工作正常; 接着填充一个数组,数组的内容为0,1,2,3至N,然后把这个数组的内容写入到EEPROM中,写入完毕后再从EEPROM的地址中读取数据, 把读取得到的与写入的数据进行校验,若一致说明读写正常,否则读写过程有问题或者EEPROM芯片不正常。
/**
* @brief I2C(AT24C02)读写测试
* @param 无
* @retval 正常返回1 ,不正常返回0
*/
uint8_t I2C_Test(void)
{
uint16_t i;
EEPROM_INFO("写入的数据");
for ( i=0; i<DATA_Size; i++ ) { //填充缓冲
I2c_Buf_Write[i] =i;
printf("0x%02X ", I2c_Buf_Write[i]);
if (i%16 == 15)
printf("\n\r");
}
//将I2c_Buf_Write中顺序递增的数据写入EERPOM中
I2C_EE_BufferWrite( I2c_Buf_Write, EEP_Firstpage, DATA_Size);
EEPROM_INFO("读出的数据");
//将EEPROM读出数据顺序保持到I2c_Buf_Read中
I2C_EE_BufferRead(I2c_Buf_Read, EEP_Firstpage, DATA_Size);
//将I2c_Buf_Read中的数据通过串口打印
for (i=0; i<DATA_Size; i++) {
if (I2c_Buf_Read[i] != I2c_Buf_Write[i]) {
printf("0x%02X ", I2c_Buf_Read[i]);
EEPROM_ERROR("错误:I2C EEPROM写入与读出的数据不一致");
return 0;
}
printf("0x%02X ", I2c_Buf_Read[i]);
if (i%16 == 15)
printf("\n\r");
}
EEPROM_INFO("I2C(AT24C02)读写测试成功");
return 1;
}
代码中先填充一个数组,数组的内容为1,2,3至N,接着把这个数组的内容写入到EEPROM中,写入时采用页写入的方式。写入完毕后再从EEPROM的地址中读取数据,把读取得到的与写入的数据进行校验,若一致说明读写正常,否则读写过程有问题或者EEPROM芯片不正常。其中代码用到的EEPROM_INFO跟EEPROM_ERROR宏类似,都是对printf函数的封装,使用和阅读代码时把它直接当成printf函数就好。具体的宏定义在“bsp_i2c_ee.h文件中”,在以后的代码我们常常会用类似的宏来输出调试信息。
22.4.2.3.2. main函数¶
最后编写main函数,函数中初始化串口、I2C外设,然后调用上面的I2C_Test函数进行读写测试, 对于MINI开发板,见 代码清单23_10a,对于指南者和霸道开发板、拂晓电机开发板,见 代码清单23_10b。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 | int main(void)
{
HAL_Init();
/* 配置系统时钟为72 MHz */
SystemClock_Config();
/*初始化USART 配置模式为 115200 8-N-1,中断接收*/
DEBUG_USART_Config();
printf("\r\n 这是一个EEPROM 读写小数和长整数实验\r\n");
/* I2C 外设初(AT24C02)始化 */
i2c_CfgGpio();
/*读取数据标志位*/
ee_ReadBytes(&cal_flag, 0, 1);
if ( cal_flag != 0xCD ) {
/*若标志等于0xcd,表示之前已有写入数据*/
printf("\r\n没有检测到数据标志,FLASH没有存储数据,即将进行小数写入实验\r\n");
cal_flag =0xCD;
/*写入标志到0地址*/
ee_WriteBytes(&cal_flag, 0, 1);
/*生成要写入的数据*/
for ( k=0; k<7; k++ ) {
double_buffer[k] = k +0.1;
int_bufffer[k]=k*500+1 ;
}
/*写入小数数据到地址10*/
ee_WriteBytes((void*)double_buffer,DOUBLE_ADDR, sizeof(double_buffer));
/*写入整数数据到地址60*/
ee_WriteBytes((void*)int_bufffer, LONGINT_ADDR, sizeof(int_bufffer));
printf("向芯片写入数据:");
/*打印到串口*/
for ( k=0; k<7; k++ ) {
printf("小数tx = %LF\r\n",double_buffer[k]);
printf("整数tx = %d\r\n",int_bufffer[k]);
}
printf("\r\n请复位开发板,以读取数据进行检验\r\n");
} else {
printf("\r\n检测到数据标志\r\n");
/*读取小数数据*/
ee_ReadBytes((void*)double_buffer, DOUBLE_ADDR, sizeof(double_buffer));
/*读取整数数据*/
ee_ReadBytes((void*)int_bufffer, LONGINT_ADDR, sizeof(int_bufffer));
printf("\r\n从芯片读到数据:\r\n");
for ( k=0; k<7; k++ ) {
printf("小数 rx = %LF \r\n",double_buffer[k]);
printf("整数 rx = %d \r\n",int_bufffer[k]);
}
}
while (1) {
}
}
|
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
/* 配置系统时钟为72 MHz */
SystemClock_Config();
/* 初始化RGB彩灯 */
LED_GPIO_Config();
LED_BLUE;
/*初始化USART1*/
UARTx_Config();
printf("\r\n 欢迎使用野火 STM32 F103 开发板。\r\n");
printf("\r\n 这是一个I2C外设(AT24C02)读写测试例程 \r\n");
/* I2C 外设初(AT24C02)始化 */
I2C_EE_Init();
if (I2C_Test() ==1) {
LED_GREEN;
} else {
LED_RED;
}
while (1) {
}
22.4.3. 下载验证¶
用USB线连接开发板“USB TO UART”接口跟电脑,在电脑端打开串口调试助手,把编译好的程序下载到开发板。在串口调试助手可看到EEPROM测试的调试信息。

图 23‑17 MINI开发板 EEPROM 测试成功

图 23‑17 指南者和霸道开发板、拂晓电机开发板 EEPROM 测试成功