11. 软件定时器¶
11.1. 软件定时器的基本概念¶
定时器,是指从指定的时刻开始,经过一个指定时间,然后触发一个超时事件,用户可以自定义定时器的周期与频 率。类似生活中的闹钟,我们可以设置闹钟每天什么时候响,还能设置响的次数,是响一次还是每天都响。
定时器有硬件定时器和软件定时器之分:
硬件定时器是芯片本身提供的定时功能。一般是由外部晶振提供给芯片输入时钟,芯片向软件模块提供一组配置寄 存器,接受控制输入,到达设定时间值后芯片中断控制器产生时钟中断。硬件定时器的精度一般很高,可以达到纳 秒级别,并且是中断触发方式。
软件定时器,软件定时器是由操作系统提供的一类系统接口,它构建在硬件定时器基础之上,使系统能够提供不受 硬件定时器资源限制的定时器服务,它实现的功能与硬件定时器也是类似的。
使用硬件定时器时,每次在定时时间到达之后就会自动触发一个中断,用户在中断中处理信息;而使用软件定时器 时,需要我们在创建软件定时器时指定时间到达后要调用的函数(也称超时函数/回调函数,为了统一,下文均用 超时函数描述),在超时函数中处理信息。
软件定时器在被创建之后,当经过设定的时钟计数值后会触发用户定义的超时函数。定时精度与系统时钟的周期有 关。一般系统利用SysTick作为软件定时器的基础时钟,超时函数类似硬件的中断服务函数,所以,超时函数也要 快进快出,而且超时函数中不能有任何阻塞线程运行的情况,比如rt_thread_delay()以及其它能阻塞线程运行的 函数,两次触发超时函数的时间间隔Tick叫定时器的定时周期。
RT-Thread操作系统提供软件定时器功能,软件定时器的使用相当于扩展了定时器的数量,允许创建更多的定时业 务。RT-Thread软件定时器功能上支持:
静态裁剪:能通过宏关闭软件定时器功能。
软件定时器创建。
软件定时器启动。
软件定时器停止。
软件定时器删除。
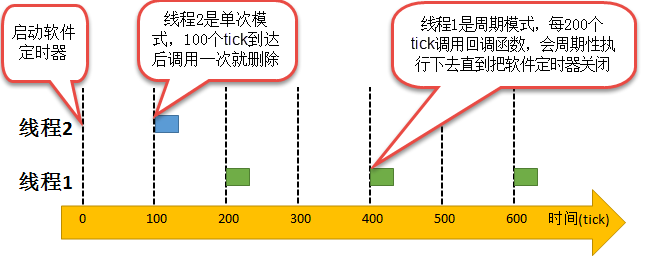
RT-Thread提供的软件定时器支持单次模式和周期模式,单次模式和周期模式的定时时间到之后都会调用定时器的超 时函数,用户可以在超时函数中加入要执行的工程代码。
单次模式:当用户创建了定时器并启动了定时器后,定时时间到了,只执行一次超时函数之后就将该定时器删除,不 再重新执行。
周期模式:这个定时器会按照设置的定时时间循环执行超时函数,直到用户将定时器删除,具体见图 软件定时器的单次模式与周期模式。
注意:在RT-Thread中创建定时器API接口可以选择软件定时器与硬件定时器,但是硬件定时器超时函数的上下文环境 中断,而软件定时器超时函数的上下文是线程。下文所说的定时器均为软件定时器工作模式,RT-Thread中在rtdef.h 中定义了相关的宏定义来选择定时器的工作模式:
RT_TIMER_FLAG_HARD_TIMER 为硬件定时器。
RT_TIMER_FLAG_SOFT_TIMER为软件定时器。
11.2. 软件定时器的应用场景¶
在很多应用中,我们需要一些定时器线程,硬件定时器受硬件的限制,数量上不足以满足用户的实际需求,无法提供更 多的定时器,那么可以采用软件定时器来完成,由软件定时器代替硬件定时器线程。但需要注意的是软件定时器的精度 是无法和硬件定时器相比的,因为在软件定时器的定时过程中是极有可能被其它的线程所打断,因为软件定时器的线程 优先级是RT_TIMER_THREAD_PRIO,默认为4。所以,软件定时器更适用于对时间精度要求不高的线程,一些辅助型的线程。
11.3. 软件定时器的精度¶
在操作系统中,通常软件定时器以系统节拍周期为计时单位。系统节拍是系统的心跳节拍,表示系统时钟的频率,就类 似人的心跳,1s能跳动多少下,系统节拍配置为RT_TICK_PER_SECOND,该宏在rtconfig.h中有定义,默认是1000。 那么系统的时钟节拍周期就为1ms(1s跳动1000下,每一下就为1ms)。软件定时器的所定时数值必须是这个节拍周期 的整数倍,例如节拍周期是10ms,那么上层软件定时器定时数值只能是10ms,20ms,100ms等,而不能取值为15ms。 由于节拍定义了系统中定时器能够分辨的精确度,系统可以根据实际系统CPU的处理能力和实时性需求设置合适的数值, 系统节拍周期的值越小,精度越高,但是系统开销也将越大,因为在1秒中系统进入时钟中断的次数也就越多。
11.4. 软件定时器的运作机制¶
软件定时器是系统资源,在创建定时器的时候会分配一块内存空间。当用户创建并启动一个软件定时器 时, RT-Thread会根据当前系统rt_tick时间及用户设置的定时确定该定时器唤醒时间timeout,并将该 定时器控制块挂入软件定时器列表rt_soft_timer_list。
在RT-Thread定时器模块中维护着两个重要的全局变量:
rt_tick,它是一个32位无符号的变量,用于记录当前系统经过的tick时间,当硬件定时器中断来临时,它将自动增加1。
软件定时器列表rt_soft_timer_list。系统新创建并激活的定时器都会以超时时间升序的方式插入 到rt_soft_timer_list列表中。系统在定时器线程中扫描rt_soft_timer_list中的第一个定时器,看 是否已超时,若已经超时了则调用软件定时器超时函数。 否则出软件定时器线程,因为定时时间是升序 插入软件定时器列表的,列表中第一个定时器的定时时间都还没到的话,那后面的定时器定时时间自然没到。
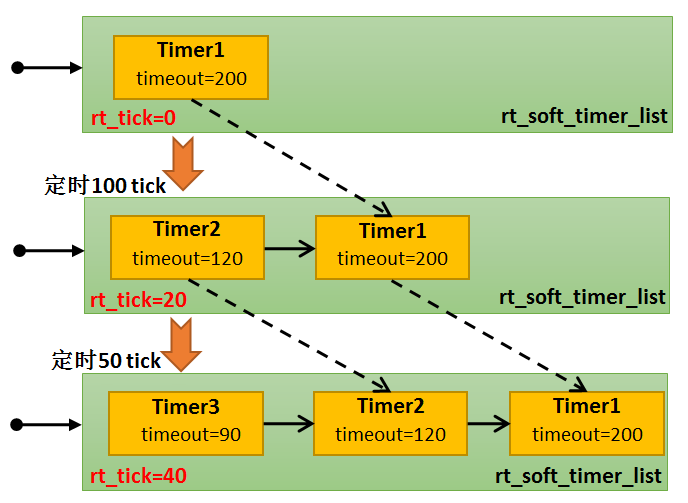
例如:系统当前时间rt_tick值为0,在当前系统中已经创建并启动了1个定时器Timer1;系统继续运行,当系统的时间 rt_tick为20的时候,用户创建并且启动一个定时时间为100的定时器Timer2,此时Timer2的溢出时间timeout就为定 时时间+系统当前时间(100+20=120),然后将Timer2按timeout升序插入软件定时器列表中;假设当前系统时间rt_tick 为40的时候,用户创建并且启动了一个定时时间为50的定时器Timer3,那么此时Timer3的溢出时间timeout就为40+50=90, 同样安装timeout的数值升序插入软件定时器列表中,在定时器链表中插入过程具体见 定时器链表示意图1。同理创建并且启动在已有 的两个定时器中间的定时器也是一样的,具体见图 定时器链表示意图2。
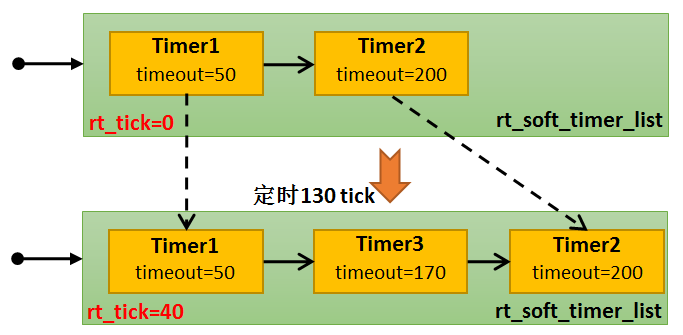
那么系统如何处理软件定时器列表?系统在不断运行,而rt_tick随着SysTick的触发一直在增长(每一次硬件定时 器中断来临,rt_tick变量会加1),在软件定时器线程中扫描rt_soft_timer_list,比较当前系统时间rt_tick是 否大于或等于timeout,若是则表示超时,定时器线程调用对应定时器的超时函数,否则退出软件定时器线程 。以 定时器链表示意图2 为例,讲解软件定时器调用超时函数的过程,在创建定Timer1并且启动后,假如系统经过了50 个tick, rt_tick从0增长到50,与Timer1的timeout值相等,这时会触发与Timer1对应的超时函数,从而转到超 时函数中执行用户代码,同时将Timer1从rt_timer_list删除。同理,在rt_tick=40的时候创建的Timer3,在经过 130个tick后(此时系统时间rt_tick是40,130个tick就是系统时间rt_tick为170的时候),与Timer3定时器对应 的超时函数会被触发,接着将Timer3从rt_timer_list删除。
使用软件定时器时候要注意以下几点:
软件定时器的超时函数中应快进快出,绝对不允许使用任何可能引软件定时器起线程挂起或者阻塞的API接口, 在超时函数中也绝对不允许出现死循环。
软件定时器使用了系统的一个队列和一个线程资源,软件定时器线程的优先级默认为RT_TIMER_THREAD_PRIO。
创建单次软件定时器,该定时器超时执行完超时函数后,系统会自动删除该软件定时器,并回收资源。
定时器线程的堆栈大小默认为RT_TIMER_THREAD_STACK_SIZE,512个字节。
11.5. 定时器超时函数¶
定时器最主要的目的是在经过指定的定时时间后,系统能够自动执行用户设定的动作,也就是超时函数。该函数在创 建定时器的时候需要用户自己定义,并且编写对应的执行代码。
在RT-Thread实时操作系统中,定时器超时函数存在着两种情况:
超时函数在(系统时钟)中断上下文环境中执行(硬件定时器);
超时函数在线程的上下文环境中执行(软件定时器)。
如果超时函数是在中断上下文环境中执行,显然对于超时函数的要求与中断服务例程的要求相同:执行时间应该尽量 短,执行时不应导致当前上下文挂起、等待。例如在中断上下文中执行的超时函数它不应该试图去申请动态内存、释 放动态内存等,也不允许调用rt_thread_delay()等导致上下文挂起的API接口,其具体的实现过程见 代码清单:定时器-1 高亮部分。 因为定时器超时函数包括软硬件定时器,所以此处仅对硬件定时器做简单两个介绍,本章节主要讲解软件定时器的实现。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | void rt_tick_increase(void)
{
struct rt_thread *thread;
/* 系统时间全局变量自加 */
++ rt_tick;
/* 检查时间片 */
thread = rt_thread_self();
-- thread->remaining_tick;
if (thread->remaining_tick == 0) {
/* 更改为初始化的时间 */
thread->remaining_tick = thread->init_tick;
/* 强制切换 */
rt_thread_yield();
}
/* 检查定时器时间 */
rt_timer_check(); (1)
}
|
代码清单:定时器-1 (1) :rt_timer_check()是具体的检查定时器是否超时的函数。在第一部分 的定时器的实现这一章节有详细讲解此函数的实现过程,这里就不再赘述。
而软件定时器的超时函数在线程上下文中执行,则不会有这个限制,但是通常也要求超时函数执行时间应该足够短, 不允许在超时函数中有阻塞的情况出现,更不允许有死循环,也不应该影响到其他定时器执行超时函数或本定时器的 下一次超时回调。软件定时器的超时函数在线程中执行,下面一起来看看软件定时器超时函数是怎么样实现的 。
我们知道,在RT-Thread启动的时候,会创建几个必要的线程,有main_thread_entry线程、rt_thread_idle_entry 线程、rt_thread_timer_entry线程。rt_thread_timer_entry是定时器线程,用于扫描软件定时器列表中是否有超 时的定时器,然后执行其对应的超时函数,具体见 代码清单:定时器-2。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 | /* system timer thread entry */
static void rt_thread_timer_entry(void *parameter)
{
rt_tick_t next_timeout;
while (1) {
/* 获取软件定时器列表中下一个定时器的到达时间 */
next_timeout = rt_timer_list_next_timeout(rt_soft_timer_list); (1)
if (next_timeout == RT_TICK_MAX) {
/* 如果没有软件定时器,则挂起线程自身 */
rt_thread_suspend(rt_thread_self()); (2)
rt_schedule();
} else {
rt_tick_t current_tick;
/* 获取当前系统时间 */
current_tick = rt_tick_get(); (3)
if ((next_timeout - current_tick) < RT_TICK_MAX / 2) { (4)
/* 计算下一个定时器溢出时间与当前时间的间隔 */
next_timeout = next_timeout - current_tick; (5)
rt_thread_delay(next_timeout); (6)
}
}
/* 检查软件定时器列表 */
rt_soft_timer_check(); (7)
}
}
#endif
|
代码清单:定时器-2 (1):rt_thread_timer_entry是一个线程,所以也是需要死循环的,线程在运行的时候 扫描软件定时器列表获取下一个定时器定时到达的时间。
代码清单:定时器-2 (2):如果此时软件定时器列表中没有软件定时器,就把线程自身挂起。因为软件定时器 线程的运行是会占用CPU的,当没有开启软件定时器的时候就不要经常进入线程扫描,直接挂起线程即可。挂起自 身之后要发起一次线程调度,让出CPU。
代码清单:定时器-2 (3):如果启动了软件定时器,那么就获取当前系统时间current_tick。
代码清单:定时器-2 (4):下一个定时器溢出时间与系统当前时间比较,如果时间还没到,执行 (5) (6) 。
代码清单:定时器-2 (5):计算还有多长时间到达下一个定时器溢出的时间,记录在next_timeout中。
代码清单:定时器-2 (6):将定时器线程延时next_timeout,这样子做就不需要经常进入定时器线程查找定时 器,直到下一个定时器需要唤醒的时候才进来处理,这样子大大提高CPU的利用率,这也是软件定时器为什么不够 精确的原因,线程在唤醒的时候不一定能得到CPU的使用权。
代码清单:定时器-2 (7):软件定时器扫描函数rt_soft_timer_check(),其实现过程具体见 代码清单:定时器-3。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 | void rt_soft_timer_check(void)
{
rt_tick_t current_tick;
rt_list_t *n;
struct rt_timer *t;
RT_DEBUG_LOG(RT_DEBUG_TIMER, ("software timer check enter\n"));
current_tick = rt_tick_get();
/*锁定调度程序*/
rt_enter_critical();
for (n = rt_soft_timer_list[RT_TIMER_SKIP_LIST_LEVEL - 1].next;
n != &(rt_soft_timer_list[RT_TIMER_SKIP_LIST_LEVEL - 1]);) {
t = rt_list_entry(n, struct rt_timer, row[RT_TIMER_SKIP_LIST_LEVEL - 1]);
/*
* 判断是超时
*
*/
if ((current_tick - t->timeout_tick) < RT_TICK_MAX / 2) { (1)
RT_OBJECT_HOOK_CALL(rt_timer_timeout_hook, (t));
/* 移动节点到下一个 */
n = n->next;
/* 首先从定时器列表中删除定时器 */
_rt_timer_remove(t); (2)
/* 执行超时功能时不锁定调度程序 */
rt_exit_critical();
/* 调用超时函数 */
t->timeout_func(t->parameter); (3)
/* 重新获取当前系统时间tick */
current_tick = rt_tick_get(); (4)
RT_DEBUG_LOG(RT_DEBUG_TIMER, ("current tick: %d\n", current_tick));
/* 锁定调度程序 */
rt_enter_critical();
if ((t->parent.flag & RT_TIMER_FLAG_PERIODIC) &&
(t->parent.flag & RT_TIMER_FLAG_ACTIVATED)) { (5)
/* 开始,设置定时器状态为可用 */
t->parent.flag &= ~RT_TIMER_FLAG_ACTIVATED;
rt_timer_start(t);
} else {
/* 停止,设置定时器状态为不可用 */
t->parent.flag &= ~RT_TIMER_FLAG_ACTIVATED; (6)
}
} else break; /* 不再检查了 */ (7)
}
/* 解锁调度程序 */
rt_exit_critical();
RT_DEBUG_LOG(RT_DEBUG_TIMER, ("software timer check leave\n"));
}
|
代码清单:定时器-3 (1):判断是系统时间是否到达定时器溢出时间。
代码清单:定时器-3 (2):如果到达了定时器溢出时间,首先移动软件定时器列表的表头指针,指向下一个定 时器,然后从软件定时器列表中删除当前时间溢出的定时器。
代码清单:定时器-3 (3):执行定时器的超时函数。
代码清单:定时器-3 (4):重新获取当前系统时间current_tick。
代码清单:定时器-3 (5):如果这个定时器是周期定时器的话,那么需要根据初始设置的定时时间重新加入定 时器链表中,设置定时器状态为可用,然后调用启动定时器函数rt_timer_start将定时器重新添加到软件定时器列表中 去,插入定时器列表会按定时器溢出时间timeout进行排序。
代码清单:定时器-3 (6):如果软件定时器是单次模式的话,则将软件定时器设置为不可用状态。
代码清单:定时器-3 (7):退出。
11.6. 软件定时器的使用¶
由于在第一部分:第11章 中已经详细讲解了定时器的函数接口与实现过程,现在不再赘述。直接讲解如何使用软件定时器。
11.6.1. 软件定时器的创建函数¶
RT-Thread给我们提供的只是一些基础函数,使用任何一个内核的资源都需要我们自己去创建,就像线程、信号 量等这些RT-Thread的资源,所以,使用软件定时器也是需要我们自己去创建的,下面来看看软件定时器创建 函数rt_timer_create()的源码,具体见 代码清单:定时器-4。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | rt_timer_t rt_timer_create(const char *name, (1)
void (*timeout)(void *parameter), (2)
void *parameter, (3)
rt_tick_t time, (4)
rt_uint8_t flag) (5)
{
struct rt_timer *timer;
/* 分配定时器对象 */
timer = (struct rt_timer *)rt_object_allocate(RT_Object_Class_Timer, name);
if (timer == RT_NULL) { (6)
return RT_NULL;
}
_rt_timer_init(timer, timeout, parameter, time, flag); (7)
return timer; (8)
}
|
代码清单:定时器-4 (1):定时器的名称,由用户自定义。
代码清单:定时器-4 (2):定时器超时函数指针(当定时器超时时,系统会调用这个指针指向的函数),函数主体由用户自己实现。
代码清单:定时器-4 (3):定时器超时函数的入口参数(当定时器超时时,调用超时函数会把这个参数做为入口参数传递给超时函数)。
代码清单:定时器-4 (4):定时器的超时时间,单位是tick。
代码清单:定时器-4 (5):定时器创建时的参数,支持的值具体见 代码清单:定时器-5 (可以用“或”关系取多个 值,但是需要注意的是互斥关系的不能共用,同一个定时器不能是无效的又是可用的,不能既是硬件定时器的同 时又是软件定时器),当指定的flag为RT_IMER_FLAG_HARD_TIMER时,如果定时器超时,定时器的超时函数将 在中断中被调用;当指定的flag为RT_TIMER_FLAG_SOFT_TIMER时,如果定时器超时,定时器的超时函数将在线程中被调用。
1 2 3 4 5 6 7 | #define RT_TIMER_FLAG_DEACTIVATED 0x0 /**< 计时器是无效的 */
#define RT_TIMER_FLAG_ACTIVATED 0x1 /**< 定时器是可用的 */
#define RT_TIMER_FLAG_ONE_SHOT 0x0 /**< 单次定时器 */
#define RT_TIMER_FLAG_PERIODIC 0x2 /**< 周期定时器 */
#define RT_TIMER_FLAG_HARD_TIMER 0x0 /**<硬定时器,定时器的超时函数将在tick isr中调用。*/
#define RT_TIMER_FLAG_SOFT_TIMER 0x4 /**<软定时器,定时器的超时函数将在定时器线程中调用。*/
|
代码清单:定时器-4 (6):分配软件定时器对象,调用rt_object_allocate此函数将从对象系统分配对 象,为创建的软件定时器分配一个软件定时器的对象,并且命名对象名称,在系统中,对象的名称必须是唯一的。
代码清单:定时器-4 (7):调用_rt_timer_init初始化函数进行定时器的初始化,在第一部分中详细讲解 过,此处不再赘述,具体见代码清单 11‑6。
代码清单:定时器-4 (8):如果定时器创建成功,则返回定时器的句柄,如果创建失败,会返回RT_NULL(通 常会由于系统内存不够用而返回RT_NULL)。
软件定时器的创建函数使用起来是很简单的,软件定时器的超时函数需要自己实现,软件定时器的工作模式以 及定时器的定时时间按需选择即可,具体见 代码清单:定时器-6 高亮部分。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | /* 创建一个软件定时器 */
swtmr1 = rt_timer_create("swtmr1_callback", /* 软件定时器的名称 */
swtmr1_callback,/* 软件定时器的超时函数 */
0, /* 定时器超时函数的入口参数 */
5000, /* 软件定时器的超时时间(周期超时时间) */
RT_TIMER_FLAG_ONE_SHOT | RT_TIMER_FLAG_SOFT_TIMER);
/*一次模式 软件定时器模式*/
/* 启动定时器 */
if (swtmr1 != RT_NULL)
rt_timer_start(swtmr1);
/* 创建一个软件定时器 */
swtmr2 = rt_timer_create("swtmr2_callback", /* 软件定时器的名称 */
swtmr2_callback, /* 软件定时器的超时函数 */
0, /* 定时器超时函数的入口参数 */
1000, /* 软件定时器的超时时间(周期超时时间) */
RT_TIMER_FLAG_PERIODIC | RT_TIMER_FLAG_SOFT_TIMER);
/* 软件定时器模式 周期模式 */
/* 启动定时器 */
if (swtmr2 != RT_NULL)
rt_timer_start(swtmr2);
|
软件定时器的其他相关函数均在第一部分的第11章 中详细介绍了,现在就不再赘述,因为这些函数的实现都是 一样的,只不过在第一部分中使用的是硬件定时器资源,在systick中断服务函数中实现定时器的扫描是否超时, 而现在使用的是软件定时器资源,在定时器线程中扫描是否超时,原理都是一样的。
11.7. 软件定时器实验¶
软件定时器实验是在RT-Thread中创建了两个软件定时器,其中一个软件定时器是单次模式,5000个tick调 用一次超时函数,另一个软件定时器是周期模式,1000个tick调用一次超时函数,在超时函数中输出相关信息, 具体见 代码清单:定时器-7 高亮部分。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 | /**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief RT-Thread 3.0 + STM32 软件定时器
*********************************************************************
* @attention
*
* 实验平台:基于野火STM32全系列(M3/4/7)开发板
* 论坛 :http://www.firebbs.cn
* 淘宝 :https://fire-stm32.taobao.com
*
**********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
#include "board.h"
#include "rtthread.h"
/*
******************************************************************
* 变量
******************************************************************
*/
/* 定义线软件定时器制块 */
static rt_timer_t swtmr1 = RT_NULL;
static rt_timer_t swtmr2 = RT_NULL;
/************************* 全局变量声明 ****************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
static uint32_t TmrCb_Count1 = 0;
static uint32_t TmrCb_Count2 = 0;
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void swtmr1_callback(void* parameter);
static void swtmr2_callback(void* parameter);
/*
*************************************************************************
* main 函数
*************************************************************************
*/
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
/*
* 开发板硬件初始化,RTT系统初始化已经在main函数之前完成,
* 即在component.c文件中的rtthread_startup()函数中完成了。
* 所以在main函数中,只需要创建线程和启动线程即可。
*/
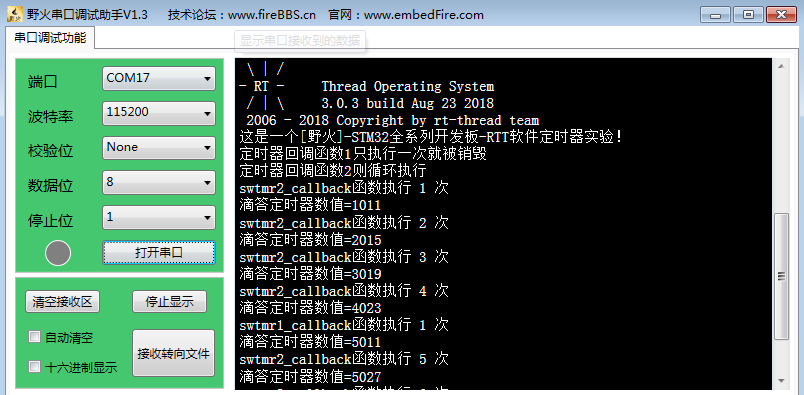
rt_kprintf("这是一个[野火]- STM32全系列开发板-RTT软件定时器实验!\n");
rt_kprintf("定时器超时函数1只执行一次就被销毁\n");
rt_kprintf("定时器超时函数2则循环执行\n");
/* 创建一个软件定时器 */
swtmr1 = rt_timer_create("swtmr1_callback", /* 软件定时器的名称 */
swtmr1_callback,/* 软件定时器的超时函数 */
0, /* 定时器超时函数的入口参数 */
5000, /* 软件定时器的超时时间(周期超时时间) */
RT_TIMER_FLAG_ONE_SHOT | RT_TIMER_FLAG_SOFT_TIMER);
/* 软件定时器模式 一次模式 */
/* 启动定时器 */
if (swtmr1 != RT_NULL)
rt_timer_start(swtmr1);
/* 创建一个软件定时器 */
swtmr2 = rt_timer_create("swtmr2_callback", /* 软件定时器的名称 */
swtmr2_callback,/* 软件定时器的超时函数 */
0, /* 定时器超时函数的入口参数 */
1000, /* 软件定时器的超时时间(周期超时时间) */
RT_TIMER_FLAG_PERIODIC | RT_TIMER_FLAG_SOFT_TIMER);
/* 软件定时器模式 周期模式 */
/* 启动定时器 */
if (swtmr2 != RT_NULL)
rt_timer_start(swtmr2);
}
/*
*************************************************************************
* 线程定义
*************************************************************************
*/
static void swtmr1_callback(void* parameter)
{
uint32_t tick_num1;
TmrCb_Count1++; /* 每调用一次加一 */
tick_num1 = (uint32_t)rt_tick_get(); /* 获取滴答定时器的计数值 */
rt_kprintf("swtmr1_callback函数执行 %d 次\n", TmrCb_Count1);
rt_kprintf("滴答定时器数值=%d\n", tick_num1);
}
static void swtmr2_callback(void* parameter)
{
uint32_t tick_num2;
TmrCb_Count2++; /* 每调用一次加一 */
tick_num2 = (uint32_t)rt_tick_get(); /* 获取滴答定时器的计数值 */
rt_kprintf("swtmr2_callback函数执行 %d 次\n", TmrCb_Count2);
rt_kprintf("滴答定时器数值=%d\n", tick_num2);
}
/****************************END OF FILE****************************/
|