2. I2C子系统–mpu6050驱动实验¶
本章我们以板载MPU6050为例讲解i2c驱动程序的编写,本章主要分为五部分内容。
第一部分,i2c基本知识,回忆i2c物理总线和基本通信协议。
第二部分,linux下的i2c驱动框架。
第三部分,i2c总线驱动代码拆解。
第四部分,i2c设备驱动的核心函数。
第五部分,MPU6050驱动以及测试程序。
2.1. i2c基本知识¶
2.1.1. i2c物理总线¶
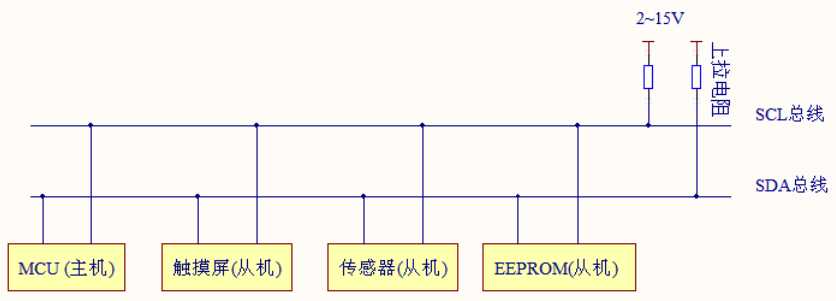
如上图所示,i2c支持一主多从,各设备地址独立,标准模式传输速率为100kbit/s,快速模式为400kbit/s。总线通过上拉电阻接到电源。当 I2C 设备空闲时,会输出高阻态,而当所有设备都空 闲,都输出高阻态时,由上拉电阻把总线拉成高电平。
I2C物理总线使用两条总线线路,SCL和SDA。
SCL: 时钟线,数据收发同步
SDA: 数据线,传输具体数据
2.1.2. i2c基本通信协议¶
2.1.2.1. 起始信号(S)与停止信号(P)¶
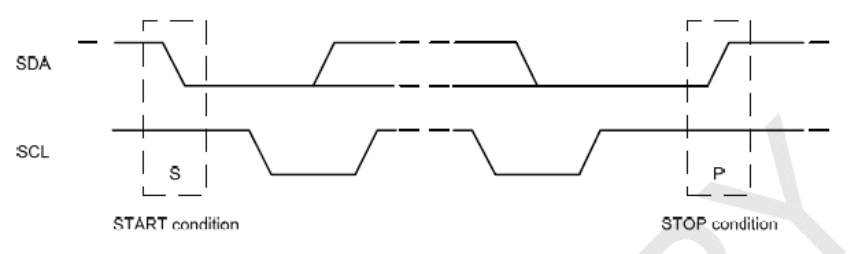
当SCL线为高电平时,SDA线由高到低的下降沿,为传输开始标志(S)。直到主设备发出结束信号(P), 否则总线状态一直为忙。结束标志(P)为,当SCL线为高电平时,SDA线由低到高的上升沿。
2.1.2.2. 数据格式与应答信号(ACK/NACK)¶
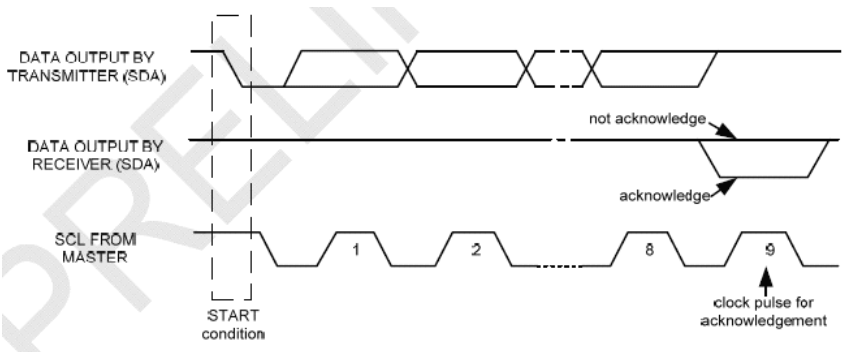
i2c的数据字节定义为8-bits长度,对每次传送的总字节数量没有限制,但对每一次传输必须伴有一个应答(ACK)信号, 其时钟由主设备提供,而真正的应答信号由从设备发出,在时钟为高时,通过拉低并保持SDA的值来实现。如果从设备忙, 它可以使 SCL保持在低电平,这会强制使主设备进入等待状态。当从设备空闲后,并且释放时钟线,原来的数据传输才会继续。
2.1.2.3. 主机与从机通信¶
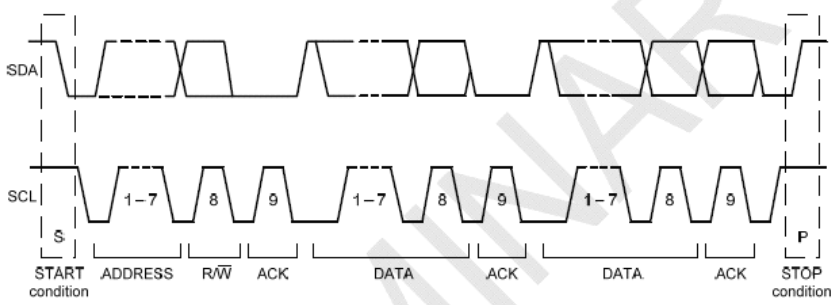
开始标志(S)发出后,主设备会传送一个7位的Slave地址,并且后面跟着一个第8位,称为Read/Write位。 R/W位表示主设备是在接受从设备的数据还是在向其写数据。然后,主设备释放SDA线,等待从设备的应答信号(ACK)。 每个字节的传输都要跟随有一个应答位。应答产生时,从设备将SDA线拉低并且在SCL为高电平时保持低。 数据传输总是以停止标志(P)结束,然后释放通信线路。 然而,主设备也可以产生重复的开始信号去操作另一台从设备, 而不发出结束标志。综上可知,所有的SDA信号变化都要在SCL时钟为低电平时进行,除了开始和结束标志
2.1.2.4. i2c对mpu6050进行数据读写¶
单字节写入

连续字节写入

对MPU6050进行写操作时,主设备发出开始标志(S)和写地址(地址位加一个R/W位,0为写)。 MPU6050产生应答信号。然后主设备开始传送寄存器地址(RA),接到应答后,开始传送寄存器数据, 然后仍然要有应答信号,连续写入多字节时依次类推。
单字节读出

连续字节读出

对MPU6050进行读操作时,主设备发出开始标志(S)和读地址(地址位加一个R/W位,1为读)。 等待MPU6050产生应答信号。然后发送寄存器地址,告诉MPU6050读哪一个寄存器。 紧接着,收到应答信号后,主设备再发一个开始信号,然后发送从设备读地址。 MPU6050产生应答信号并开始发送寄存器数据。通信以主设备产生的拒绝应答信号(NACK)和结束标志(P)结束。
学过单片机的用户对i2c协议并不陌生,这里只是简单的讲解,如果忘记可参考 【野火®】零死角玩转STM32 中i2c章节。
2.2. i2c驱动框架¶
在编写单片机裸机i2c驱动时我们需要根据i2c协议手动配置i2c控制寄存器使其能够输出起始信号、停止信号、数据信息等等。
在Linux系统中则采用了总线、设备驱动模型。我们之前讲解的平台设备也是采用了这种模型,只不过平台总线是一个虚拟的总线。
我们知道一个i2c(例如i2c1)上可以挂在多个i2c设备,例如MPU6050、i2c接口的OLED显示屏、摄像头(摄像头通过i2c接口发送控制信息)等等, 这些设备共用一个i2c,这个i2c的驱动我们称为i2c总线驱动。而对应具体的设备,例如mpu6050的驱动就是i2c设备驱动。 这样我们要使用mpu6050就需要拥有“两个驱动”一个是i2c总线驱动和mpu6050设备驱动。
i2c总线驱动由芯片厂商提供(驱动复杂,官方提供了经过测试的驱动,我们直接用),
mpu6050设备驱动可以从mpu6050芯片厂家那里获得(不确定有),也可以我们手动编写。
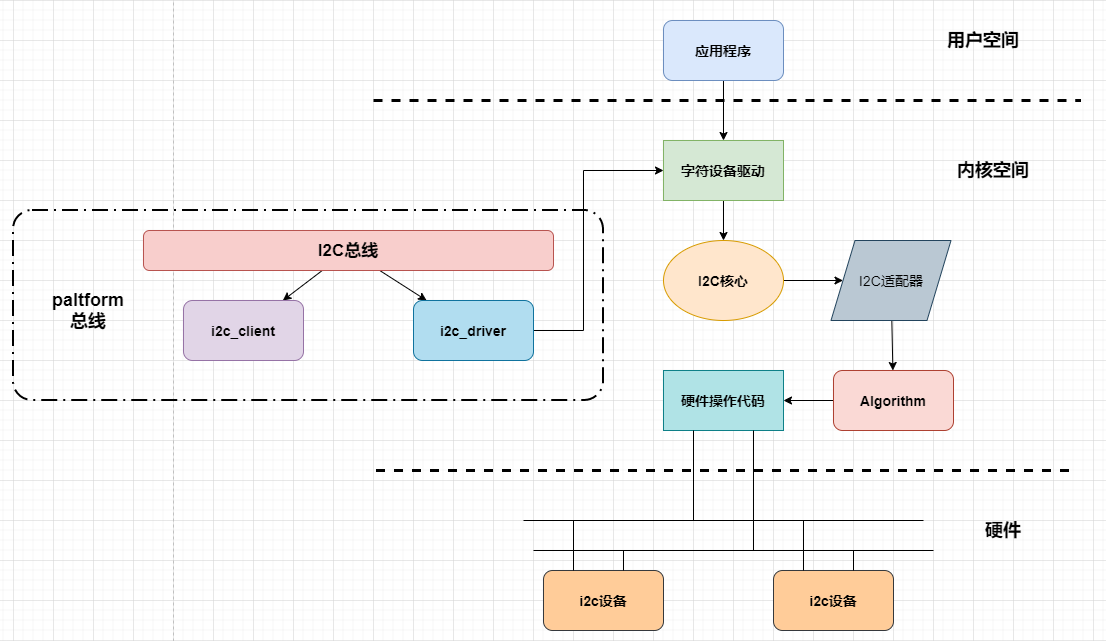
如上图所示,i2c驱动框架包括i2c总线驱动、具体某个设备的驱动。
i2c总线包括i2c设备(i2c_client)和i2c驱动(i2c_driver), 当我们向linux中注册设备或驱动的时候,按照i2c总线匹配规则进行配对,配对成功,则可以通过i2c_driver中.prob函数创建具体的设备驱动。 在现代linux中,i2c设备不再需要手动创建,而是使用设备树机制引入,设备树节点是与paltform总线相配合使用的。 所以需先对i2c总线包装一层paltform总线,当设备树节点转换为平台总线设备时,我们在进一步将其转换为i2c设备,注册到i2c总线中。
设备驱动创建成功,我们还需要实现设备的文件操作接口(file_operations),file_operations中会使用到内核中i2c核心函数(i2c系统已经实现的函数,专门开放给驱动工程师使用)。 使用这些函数会涉及到i2c适配器,也就是i2c控制器。由于ic2控制器有不同的配置,所有linux将每一个i2c控制器抽象成i2c适配器对象。 这个对象中存在一个很重要的成员变量——Algorithm,Algorithm中存在一系列函数指针,这些函数指针指向真正硬件操作代码。
2.2.1. 关键数据结构¶
在开始拆解i2c驱动框架的源码之前,先了解其中几个重要的对象。
struct i2c_adapter
i2c_适配器对应一个i2c控制器,是用于标识物理i2c总线以及访问它所需的访问算法的结构。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | /*
* i2c_adapter is the structure used to identify a physical i2c bus along
* with the access algorithms necessary to access it.
*/
struct i2c_adapter {
struct module *owner;
unsigned int class; /* classes to allow probing for */
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
void *algo_data;
/* data fields that are valid for all devices */
struct rt_mutex bus_lock;
int timeout; /* in jiffies */
int retries;
struct device dev; /* the adapter device */
int nr;
char name[48];
struct completion dev_released;
struct mutex userspace_clients_lock;
struct list_head userspace_clients;
struct i2c_bus_recovery_info *bus_recovery_info;
const struct i2c_adapter_quirks *quirks;
};
|
algo: struct i2c_algorithm 结构体,访问总线的算法;
dev: struct device 结构体,控制器,表明这是一个设备。
struct i2c_algorithm
i2c_算法是一类硬件解决方案的接口,这些解决方案可以使用相同的总线算法来解决,即位碰撞或PCF8584,举两种最常见的算法 structi2c_algorithm 结构体用于指定访问总线(i2c)的算法,在这里就是用于指定外部访问i2c总线的接口,这个“接口”体现到代码就是一些接口函数。 从以上代码不难看出i2c_algorithm结构体实际提供了一些函数指针,这些函数就是外部访问i2c总线的接口,更直白的说, i2c设备例如mpu6050、i2c接口的oled屏等等就是通过这些函数接口使用i2c总线实现收、发数据的。在i2c1的总线驱动中会实现这些函数(部分函数)。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | struct i2c_algorithm {
/* If an adapter algorithm can't do I2C-level access, set master_xfer
to NULL. If an adapter algorithm can do SMBus access, set
smbus_xfer. If set to NULL, the SMBus protocol is simulated
using common I2C messages */
/* master_xfer should return the number of messages successfully
processed, or a negative value on error */
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,
int num);
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data *data);
/* To determine what the adapter supports */
u32 (*functionality) (struct i2c_adapter *);
#if IS_ENABLED(CONFIG_I2C_SLAVE)
int (*reg_slave)(struct i2c_client *client);
int (*unreg_slave)(struct i2c_client *client);
#endif
};
|
master_xfer: 作为主设备时的发送函数,应该返回成功处理的消息数,或者在出错时返回负值。
smbus_xfer: 作为从设备时的发送函数。
struct i2c_client
表示i2c从设备
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | struct i2c_client {
unsigned short flags; /* div., see below */
unsigned short addr; /* chip address - NOTE: 7bit */
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter; /* the adapter we sit on */
struct device dev; /* the device structure */
int init_irq; /* irq set at initialization */
int irq; /* irq issued by device */
struct list_head detected;
#if IS_ENABLED(CONFIG_I2C_SLAVE)
i2c_slave_cb_t slave_cb; /* callback for slave mode */
#endif
};
|
flags: :I2C_CLIENT_TEN表示设备使用10位芯片地址,I2C客户端PEC表示它使用SMBus数据包错误检查
addr: addr在连接到父适配器的I2C总线上使用的地址。
name: 表示设备的类型,通常是芯片名。
adapter: struct i2c_adapter 结构体,管理托管这个I2C设备的总线段。
dev: Driver model设备节点。
init_irq: 作为从设备时的发送函数。
irq: 表示该设备生成的中断号。
detected: struct list_head i2c的成员_驱动程序.客户端列表或i2c核心的用户空间设备列表。
slave_cb: 使用适配器的I2C从模式时回调。适配器调用它来将从属事件传递给从属驱动程序。i2c_客户端识别连接到i2c总线的单个设备(即芯片)。暴露在Linux下的行为是由管理设备的驱动程序定义的。
struct i2c_driver
i2c设备驱动程序
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | struct i2c_driver {
unsigned int class;
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
struct device_driver driver;
const struct i2c_device_id *id_table;
int (*detect)(struct i2c_client *, struct i2c_board_info *);
const unsigned short *address_list;
struct list_head clients;
...
};
|
probe: i2c设备和i2c驱动匹配后,回调该函数指针。
id_table: struct i2c_device_id 要匹配的从设备信息。
address_list: 设备地址
clients: 设备链表
detect: 设备探测函数
2.3. i2c总线驱动¶
i2c总线驱动由芯片厂商提供,如果我们使用NXP官方提供的Linux内核,i2c总线驱动已经保存在内核中,并且默认情况下已经编译进内核。
下面结合源码简单介绍i2c总线的运行机制。
1、注册I2C总线
2、将I2C驱动添加到I2C总线的驱动链表中
3、遍历I2C总线上的设备链表,根据i2c_device_match函数进行匹配,如果匹配调用i2c_device_probe函数
4、i2c_device_probe函数会调用I2C驱动的probe函数
i2c总线定义
1 2 3 4 5 6 7 | struct bus_type i2c_bus_type = {
.name = "i2c",
.match = i2c_device_match,
.probe = i2c_device_probe,
.remove = i2c_device_remove,
.shutdown = i2c_device_shutdown,
};
|
i2c总线维护着两个链表(I2C驱动、I2C设备),管理I2C设备和I2C驱动的匹配和删除等
i2c总线注册
linux启动之后,默认执行i2c_init。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | static int __init i2c_init(void)
{
int retval;
...
retval = bus_register(&i2c_bus_type);
if (retval)
return retval;
is_registered = true;
...
retval = i2c_add_driver(&dummy_driver);
if (retval)
goto class_err;
if (IS_ENABLED(CONFIG_OF_DYNAMIC))
WARN_ON(of_reconfig_notifier_register(&i2c_of_notifier));
if (IS_ENABLED(CONFIG_ACPI))
WARN_ON(acpi_reconfig_notifier_register(&i2c_acpi_notifier));
return 0;
...
}
|
第5行:bus_register注册总线i2c_bus_type,总线定义如上所示。
第11行:i2c_add_driver注册设备dummy_driver。
i2c设备和i2c驱动匹配规则
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | static int i2c_device_match(struct device *dev, struct device_driver *drv)
{
struct i2c_client *client = i2c_verify_client(dev);
struct i2c_driver *driver;
/* Attempt an OF style match */
if (i2c_of_match_device(drv->of_match_table, client))
return 1;
/* Then ACPI style match */
if (acpi_driver_match_device(dev, drv))
return 1;
driver = to_i2c_driver(drv);
/* Finally an I2C match */
if (i2c_match_id(driver->id_table, client))
return 1;
return 0;
}
|
of_driver_match_device: 设备树匹配方式,比较 I2C 设备节点的 compatible 属性和 of_device_id 中的 compatible 属性
acpi_driver_match_device: ACPI 匹配方式
i2c_match_id: i2c总线传统匹配方式,比较 I2C设备名字和 i2c驱动的id_table->name 字段是否相等
在i2c总线驱动代码源文件中,我们只简单介绍重要的几个点,如果感兴趣可自行阅读完整的i2c驱动源码。 通常情况下,看驱动程序首先要找到驱动的入口和出口函数,驱动入口和出口位于驱动的末尾,如下所示。
1 2 3 4 5 6 7 8 9 10 11 | static int __init i2c_adap_imx_init(void)
{
return platform_driver_register(&i2c_imx_driver);
}
subsys_initcall(i2c_adap_imx_init);
static void __exit i2c_adap_imx_exit(void)
{
platform_driver_unregister(&i2c_imx_driver);
}
module_exit(i2c_adap_imx_exit);
|
驱动入口和出口函数很简单,我们可以从中得到i2c驱动是一个平台驱动,并且我们知道平台驱动结构体是“i2c_imx_driver”,平台驱动结构体如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | static const struct of_device_id i2c_imx_dt_ids[] = {
{ .compatible = "fsl,imx1-i2c", .data = &imx1_i2c_hwdata, },
{ .compatible = "fsl,imx21-i2c", .data = &imx21_i2c_hwdata, },
{ .compatible = "fsl,vf610-i2c", .data = &vf610_i2c_hwdata, },
{ /* sentinel */ }
};
static struct platform_driver i2c_imx_driver = {
.probe = i2c_imx_probe,
.remove = i2c_imx_remove,
.driver = {
.name = DRIVER_NAME,
.owner = THIS_MODULE,
.of_match_table = i2c_imx_dt_ids,
.pm = IMX_I2C_PM,
},
.id_table = imx_i2c_devtype,
};
|
第1-6行:是i2c驱动的匹配表,用于和设备树节点匹配,
第8-18行:是初始化的平台设备结构体,从这个结构体我们可以找到.prob函数,.prob函数的作用我们都很清楚,通常情况下该函数实现设备的基本初始化。
以下是.porb函数的内容。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 | static int i2c_imx_probe(struct platform_device *pdev)
{
const struct of_device_id *of_id = of_match_device(i2c_imx_dt_ids,
&pdev->dev);
struct imx_i2c_struct *i2c_imx;
struct resource *res;
struct imxi2c_platform_data *pdata = dev_get_platdata(&pdev->dev);
void __iomem *base;
int irq, ret;
dma_addr_t phy_addr;
dev_dbg(&pdev->dev, "<%s>\n", __func__);
irq = platform_get_irq(pdev, 0);
if (irq < 0) {
dev_err(&pdev->dev, "can't get irq number\n");
return irq;
}
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
base = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(base))
return PTR_ERR(base);
phy_addr = (dma_addr_t)res->start;
i2c_imx = devm_kzalloc(&pdev->dev, sizeof(*i2c_imx), GFP_KERNEL);
if (!i2c_imx)
return -ENOMEM;
if (of_id)
i2c_imx->hwdata = of_id->data;
else
i2c_imx->hwdata = (struct imx_i2c_hwdata *)
platform_get_device_id(pdev)->driver_data;
/* Setup i2c_imx driver structure */
strlcpy(i2c_imx->adapter.name, pdev->name, sizeof(i2c_imx->adapter.name));
i2c_imx->adapter.owner = THIS_MODULE;
i2c_imx->adapter.algo = &i2c_imx_algo;
i2c_imx->adapter.dev.parent = &pdev->dev;
i2c_imx->adapter.nr = pdev->id;
i2c_imx->adapter.dev.of_node = pdev->dev.of_node;
i2c_imx->base = base;
/* Get I2C clock */
i2c_imx->clk = devm_clk_get(&pdev->dev, NULL);
if (IS_ERR(i2c_imx->clk)) {
dev_err(&pdev->dev, "can't get I2C clock\n");
return PTR_ERR(i2c_imx->clk);
}
ret = clk_prepare_enable(i2c_imx->clk);
if (ret) {
dev_err(&pdev->dev, "can't enable I2C clock\n");
return ret;
}
/* Request IRQ */
ret = devm_request_irq(&pdev->dev, irq, i2c_imx_isr,
IRQF_NO_SUSPEND, pdev->name, i2c_imx);
if (ret) {
dev_err(&pdev->dev, "can't claim irq %d\n", irq);
goto clk_disable;
}
/* Init queue */
init_waitqueue_head(&i2c_imx->queue);
/* Set up adapter data */
i2c_set_adapdata(&i2c_imx->adapter, i2c_imx);
/* Set up clock divider */
i2c_imx->bitrate = IMX_I2C_BIT_RATE;
ret = of_property_read_u32(pdev->dev.of_node,
"clock-frequency", &i2c_imx->bitrate);
if (ret < 0 && pdata && pdata->bitrate)
i2c_imx->bitrate = pdata->bitrate;
/* Set up chip registers to defaults */
imx_i2c_write_reg(i2c_imx->hwdata->i2cr_ien_opcode ^ I2CR_IEN,
i2c_imx, IMX_I2C_I2CR);
imx_i2c_write_reg(i2c_imx->hwdata->i2sr_clr_opcode, i2c_imx, IMX_I2C_I2SR);
/* Add I2C adapter */
ret = i2c_add_numbered_adapter(&i2c_imx->adapter);
if (ret < 0) {
dev_err(&pdev->dev, "registration failed\n");
goto clk_disable;
}
/* Set up platform driver data */
platform_set_drvdata(pdev, i2c_imx);
clk_disable_unprepare(i2c_imx->clk);
dev_dbg(&i2c_imx->adapter.dev, "claimed irq %d\n", irq);
dev_dbg(&i2c_imx->adapter.dev, "device resources: %pR\n", res);
dev_dbg(&i2c_imx->adapter.dev, "adapter name: \"%s\"\n",
i2c_imx->adapter.name);
dev_info(&i2c_imx->adapter.dev, "IMX I2C adapter registered\n");
/* Init DMA config if supported */
i2c_imx_dma_request(i2c_imx, phy_addr);
return 0; /* Return OK */
clk_disable:
clk_disable_unprepare(i2c_imx->clk);
return ret;
}
|
第14-18行:获取中断号,在i2c1的设备树节点中定义了中断,这里获取得到的中断号申请中断时会用到,获取函数使用的是内核提供的函数 platform_get_irq。
第20-23行:获取reg属性,这里同样使用的是内核提供的“platform_get_resource”它实现的功能和我们使用of函数获取reg属性相同。这里的代码获取得到了i2c1的基地址,并且使用“devm_ioremap_resource”将其转化为虚拟地址。
第27-29行:为i2c_imx申请内存空间,我们先不关心申请函数,重点是结构体i2c_imx下面我们将重点介绍这个结构体。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | struct imx_i2c_struct {
struct i2c_adapter adapter;
struct clk *clk;
void __iomem *base;
wait_queue_head_t queue;
unsigned long i2csr;
unsigned int disable_delay;
int stopped;
unsigned int ifdr; /* IMX_I2C_IFDR */
unsigned int cur_clk;
unsigned int bitrate;
const struct imx_i2c_hwdata *hwdata;
struct imx_i2c_dma *dma;
};
|
imx_i2c_struct结构体成员较多,其中大多数是用于保存i2c硬件信息。
clk: clk结构体保存时钟相关信息
bitrate: 保存i2c的波特率
dma: struct imx_i2c_dma 结构体 dam相关信息等等。
第38-44行:初始化i2c_imx结构体,根据前面讲解,i2c_imx结构体内有一个imx_i2c_struct类型的结构体,在程序中它代表一个实际的i2c总线。这部分初始化代码大多数用于初始化imx_i2c_struct结构体的成员。其中我们需要特别关心“i2c_imx->adapter.algo = &i2c_imx_algo;”,它就是用于初始化“访问总线(i2c)的算法”。“i2c_imx_algo”定义如下。
1 2 3 4 | static struct i2c_algorithm i2c_imx_algo = {
.master_xfer = i2c_imx_xfer,
.functionality = i2c_imx_func,
};
|
i2c_imx_algo结构体内指定了两个函数,它们就是外部访问i2c总线的接口:
函数i2c_imx_func只是用于返回当前所处状态。
函数i2c_imx_xfer真正实现外部访问i2c总线。
i2c_imx_xfer函数定义如下(省略了具体的函数实现)。
1 | static int i2c_imx_xfer(struct i2c_adapter *adapter, struct i2c_msg *msgs, int num)
|
在编写设备驱动时我们会使用“i2c_transfer”函数执行数据的传输,i2c_transfer函数最终就是调用i2c_imx_xfer函数实现具体的收发工作。 在编写设备驱动时我们会详细介绍i2c_transfer函数的用法。
第47-83行:完成一些基本的初始化,从上到下依次为 获取i2c的时钟、使能i2c时钟、请求中断、初始化队列、设置i2c_adapter结构体的data参数、设置i2c1的时钟分频、设置寄存器为默认值。
第86-90行:添加i2c adapter 。根据之前讲解,在系统中一个i2c adapter(一个i2c_adapter结构体)对应一个i2c设备,这一步就是将i2c添加到系统中。参数就是我们前面部分初始化的i2c_imx->adapter结构体。
第92-103行:设置平台驱动程序数据,配置DMA等。
整个.prob函数完成了两个主要工作 。第一,初始化i2c1硬件,第二,初始化一个“代表i2c1”的i2c_adapter结构体,并将其添加到系统中。
.probe函数完成了i2c的基本初始化并将其添加到了系统中。i2c总线驱动的另外一个重要工作就是实现i2c对外接口函数。 我们在初始化i2c_adapter结构体时已经初始化了*访问总线算法结构体* i2c_adapter->i2c_algorithm。 具体代码为 i2c_imx->adapter.algo = &i2c_imx_algo 。
在i2c_imx_algo结构体源码如下所示。
1 2 3 4 | static struct i2c_algorithm i2c_imx_algo = {
.master_xfer = i2c_imx_xfer,
.functionality = i2c_imx_func,
};
|
在i2c设备驱动程序中“i2c_transfer”函数的读、写工工作实际由i2c_imx_xfer函数完成,i2c_imx_xfer函数就是i2c总线驱动中实现具体收发工作的函数。i2c_imx_xfer部分代码如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 | static int i2c_imx_xfer(struct i2c_adapter *adapter, struct i2c_msg *msgs, int num)
{
...
/* read/write data */
for (i = 0; i < num; i++) {
if (i == num - 1)
is_lastmsg = true;
if (i) {
dev_dbg(&i2c_imx->adapter.dev,
"<%s> repeated start\n", __func__);
temp = imx_i2c_read_reg(i2c_imx, IMX_I2C_I2CR);
temp |= I2CR_RSTA;
imx_i2c_write_reg(temp, i2c_imx, IMX_I2C_I2CR);
result = i2c_imx_bus_busy(i2c_imx, 1);
if (result)
goto fail0;
}
dev_dbg(&i2c_imx->adapter.dev,
"<%s> transfer message: %d\n", __func__, i);
/* write/read data */
...
if (msgs[i].flags & I2C_M_RD)
result = i2c_imx_read(i2c_imx, &msgs[i], is_lastmsg);
else {
if (i2c_imx->dma && msgs[i].len >= DMA_THRESHOLD)
result = i2c_imx_dma_write(i2c_imx, &msgs[i]);
else
result = i2c_imx_write(i2c_imx, &msgs[i]);
}
if (result)
goto fail0;
}
...
}
|
从以上代码中可以看到i2c_imx_xfer函数会调用i2c_imx_dma_write、i2c_imx_read、 imx_i2c_write_reg等等基本收发函数实现数据的收发工作,这些基本的收发函数由i2c总线驱动实现。
至此,我们知道i2c总线驱动完成了i2c的硬件初始化、将i2c总线添加到系统、并提供外界访问i2c总线的接口函数。 我们的i2c设备驱动只需要根据特定设备使用这些接口函数即可。
2.4. i2c设备驱动核心函数¶
i2c_add_adapter()
向linux系统注册一个i2c适配器
1 2 3 4 | //linux系统自动设置i2c适配器编号(adapter->nr)
int i2c_add_adapter(struct i2c_adapter *adapter)
//手动设置i2c适配器编号(adapter->nr)
int i2c_add_numbered_adapter(struct i2c_adapter *adapter)
|
参数:
adapter: i2c物理控制器对应的适配器
返回值:
成功: 0
失败: 负数
i2c_add_driver()宏
1 | #define i2c_add_driver(driver)
|
这个宏函数的本质是调用了i2c_register_driver()函数,函数如下。
i2c_register_driver()函数
1 | int i2c_register_driver(struct module *owner, struct i2c_driver *driver)
|
参数:
owner: 一般为 THIS_MODULE
driver: 要注册的 i2c_driver.
返回值:
成功: 0
失败: 负数
i2c_transfer()函数
i2c_transfer()函数最终就是调用我们前面讲到的i2c_imx_xfer()函数来实现数据传输。
1 | int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
|
参数:
adap : struct i2c_adapter 结构体,收发消息所使用的i2c适配器,i2c_client 会保存其对应的 i2c_adapter
msgs: struct i2c_msg 结构体,i2c要发送的一个或多个消息
num : 消息数量,也就是msgs的数量
返回值:
成功: 发送的msgs的数量
失败: 负数
i2c_msg结构体
1 2 3 4 5 6 7 | struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
...
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
|
addr: iic设备地址
flags: 消息传输方向和特性。I2C_M_RD:表示读取消息;0:表示发送消息。
len: 消息数据的长度
buf: 字符数组存放消息,作为消息的缓冲区
i2c_master_send()函数
1 2 3 4 5 | static inline int i2c_master_send(const struct i2c_client *client,
const char *buf, int count)
{
return i2c_transfer_buffer_flags(client, (char *)buf, count, 0);
};
|
i2c_master_recv()函数
1 2 3 4 5 | static inline int i2c_master_recv(const struct i2c_client *client,
char *buf, int count)
{
return i2c_transfer_buffer_flags(client, buf, count, I2C_M_RD);
};
|
i2c_transfer_buffer_flags()函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | int i2c_transfer_buffer_flags(const struct i2c_client *client, char *buf,
int count, u16 flags)
{
int ret;
struct i2c_msg msg = {
.addr = client->addr,
.flags = flags | (client->flags & I2C_M_TEN),
.len = count,
.buf = buf,
};
ret = i2c_transfer(client->adapter, &msg, 1);
/*
* If everything went ok (i.e. 1 msg transferred), return #bytes
* transferred, else error code.
*/
return (ret == 1) ? count : ret;
}
|
下面以mpu6050为例讲解如何编写i2c设备驱动。
2.5. mpu6050驱动实验¶
2.5.1. 硬件介绍¶
本节实验使用到 EBF6ULL-PRO 开发板上的 MPU6050。
MPU6050是一款运动处理传感器,它集成了3轴MEMS陀螺仪,3轴MEMS加速度计。
2.5.1.1. 硬件原理图分析¶
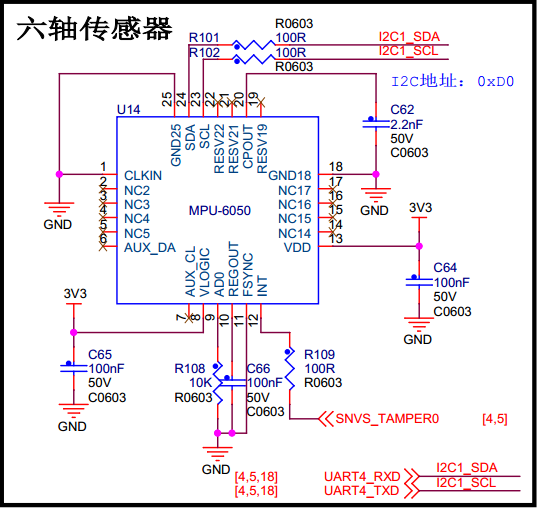
MPU6050是通过i2c连接到开发板的,其中传感器上的SDA和SCL连到开发板i2c1; 开发板要控制MPU6050需要先复用这两个引脚为i2c控制器引脚。
查看MPU芯片手册我们可以知道,MPU6050的slave地址为b110100X,七位字长,最低有效位X由AD0管脚上的逻辑电平决定。 从原理图上可以看到,AD0接地,则地址为b1101000,也就是0x68。
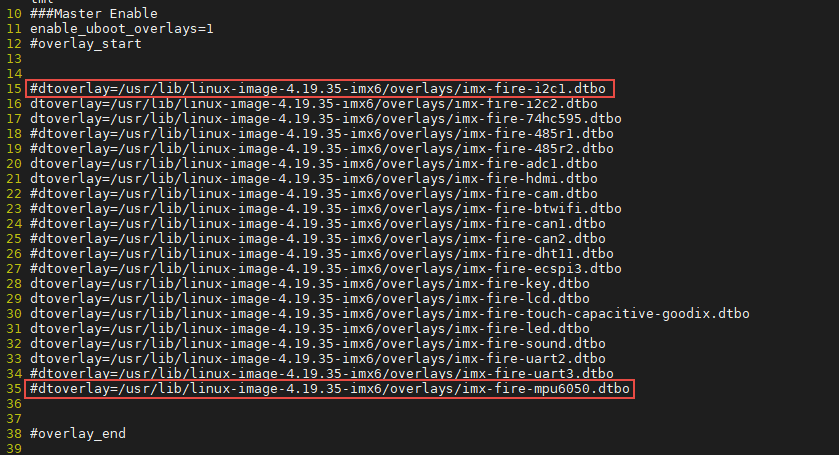
2.5.1.2. 设备树¶
由上面的原理图分析,我们可以得到下面的设备树。
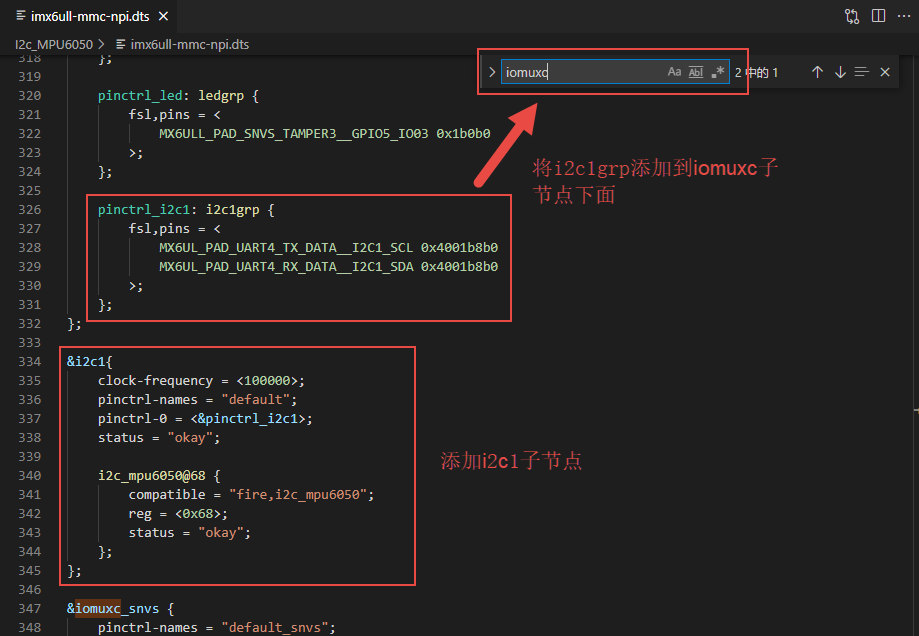
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | pinctrl_i2c1: i2c1grp {
fsl,pins = <
MX6UL_PAD_UART4_TX_DATA__I2C1_SCL 0x4001b8b0
MX6UL_PAD_UART4_RX_DATA__I2C1_SDA 0x4001b8b0
>;
};
&i2c1{
clock-frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1>;
status = "okay";
i2c_mpu6050@68 {
compatible = "fire,i2c_mpu6050";
reg = <0x68>;
status = "okay";
};
};
|
第1行: 在iomuxc子节点下面添加新的子节点pinctrl_i2c1: i2c1grp。
第2-5行: 在fsl,pins属性声明引脚组MX6UL_PAD_UART4_TX_DATA__I2C1_SCL和MX6UL_PAD_UART4_RX_DATA__I2C1_SDA。
第8行: 是在i2c1控制器下面设置i2c1属性。
第9行: 设置i2c1控制器的时钟频率100k。
第10行: 设置引脚默认状态。
第11行: 设置pinctrl_i2c1为具体的引脚组。
第12行: 设置i2c1控制器状态为okay。
第13行: 添加MPU6050子节点,
第14行: 设置MPU6050子节点属性为fire,i2c_mpu6050,和驱动保持一致即可。
第15行: 设置reg属性,reg属性只需要指定MPU6050在i2c1总线上的地址,原理图分析可知为0x68。
2.5.2. 实验代码讲解¶
本章的示例代码目录为:linux_driver/I2c_MPU6050
2.5.2.2. mpu6050驱动实现¶
由于NXP官方已经写好了i2c的总线驱动,mpu6050这个设备驱动就变得很简单,下面结合代码介绍mpu6050设别驱动实现。
和平台设备驱动类似,pu6050驱动程序结构如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 | static int i2c_write_mpu6050(struct i2c_client *mpu6050_client, u8 address, u8 data)
{
return 0;
}
static int i2c_read_mpu6050(struct i2c_client *mpu6050_client, u8 address, void *data, u32 length)
{
return 0;
}
static int mpu6050_init(void)
{
return 0;
}
/*字符设备操作函数集,open函数实现*/
static int mpu6050_open(struct inode *inode, struct file *filp)
{
return 0;
}
/*字符设备操作函数集,.read函数实现*/
static ssize_t mpu6050_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
return 0;
}
/*字符设备操作函数集,.release函数实现*/
static int mpu6050_release(struct inode *inode, struct file *filp)
{
return 0;
}
/*字符设备操作函数集*/
static struct file_operations mpu6050_chr_dev_fops =
{
.owner = THIS_MODULE,
.open = mpu6050_open,
.read = mpu6050_read,
.release = mpu6050_release,
};
/*i2c总线设备函数集*/
static int mpu6050_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
return 0;
}
static int mpu6050_remove(struct i2c_client *client)
{
/*删除设备*/
return 0;
}
/*定义i2c总线设备结构体*/
struct i2c_driver mpu6050_driver = {
.probe = mpu6050_probe,
.remove = mpu6050_remove,
.id_table = gtp_device_id,
};
/*
* 驱动初始化函数
*/
static int __init mpu6050_driver_init(void)
{
return 0;
}
/*
* 驱动注销函数
*/
static void __exit mpu6050_driver_exit(void)
{
}
module_init(mpu6050_driver_init);
module_exit(mpu6050_driver_exit);
MODULE_LICENSE("GPL");
|
驱动程序可分为如下四部分内容(从下往上看):
第49-73行: 定义i2c总线设备结构体并实现i2c总线设备的注册和注销函数,在这里就是程驱动程序的入口和出口函数。
第38-47行: 实现i2c总线设备结构体中定义的操作函数,主要是.probe匹配函数,在.probe函数中添加、注册一个字符设备,这个字符设备用于实现mpu6050的具体功能。
第14-36行: 定义并实现字符设备操作函数集。在应用程序中的open、read操作传到内核后就是执行这些函数,所以他们要真正实现对mpu6050的初始化以及读取转换结果。
第1-12行: 具体的读、写mpu6050的函数,它们被第三部分的函数调用,用户自行定义。
下面我们将按照这四部分内容介绍mpu6050设备驱动程序实现。
2.5.2.2.1. 驱动入口和出口函数实现¶
驱动入口和出口函数仅仅用于注册、注销i2c设备驱动,代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 | /*定义ID 匹配表*/
static const struct i2c_device_id gtp_device_id[] = {
{"fire,i2c_mpu6050", 0},
{}};
/*定义设备树匹配表*/
static const struct of_device_id mpu6050_of_match_table[] = {
{.compatible = "fire,i2c_mpu6050"},
{/* sentinel */}};
/*定义i2c设备结构体*/
struct i2c_driver mpu6050_driver = {
.probe = mpu6050_probe,
.remove = mpu6050_remove,
.id_table = gtp_device_id,
.driver = {
.name = "fire,i2c_mpu6050",
.owner = THIS_MODULE,
.of_match_table = mpu6050_of_match_table,
},
};
/*
*驱动初始化函数
*/
static int __init mpu6050_driver_init(void)
{
int ret;
pr_info("mpu6050_driver_init\n");
ret = i2c_add_driver(&mpu6050_driver);
return ret;
}
/*
*驱动注销函数
*/
static void __exit mpu6050_driver_exit(void)
{
pr_info("mpu6050_driver_exit\n");
i2c_del_driver(&mpu6050_driver);
}
module_init(mpu6050_driver_init);
module_exit(mpu6050_driver_exit);
MODULE_LICENSE("GPL");
|
第1-9行: 定义设备树匹配表。
第13-14行: .probe和.remove,它们是i2c设备的操作函数,.probe函数在匹配成功后会执行,设备注销之前.remove函数会执行,稍后我们会实现这两个函数。
第12-21行: 定义的i2c设备驱动结构体mpu6050_driver,和我们之前学习的平台设备驱动类似,一个“结构体”代表了一个设备。结构体内主要成员介绍如下, “.id_table”和“.of_match_table”,它们用于和匹配设备树节点,具体实现如代码如第二行、第七行。
第26-41行: 就是我们常说的驱动入口和出口函数。在入口函数内我们调用“i2c_add_driver”函数添加一个i2c设备驱动。在出口函数内调用“i2c_del_driver”函数删除一个i2c设备驱动。它们的参数都只有一个i2c设备驱动结构体。
2.5.2.2.2. .probe函数和.remove函数实现¶
通常情况下.probe用于实现一些初始化工作,.remove用于实现退出之前的清理工作。 mpu6050需要初始化的内容很少,我们放到了字符设备的.open函数中实现.probe函数只需要添加、注册一个字符设备即可。 程序源码如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | static int mpu6050_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret = -1; //保存错误状态码
printk(KERN_EMERG "\t match successed \n");
//采用动态分配的方式,获取设备编号,次设备号为0
ret = alloc_chrdev_region(&mpu6050_devno, 0, DEV_CNT, DEV_NAME);
if (ret < 0)
{
printk("fail to alloc mpu6050_devno\n");
goto alloc_err;
}
...
}
static int mpu6050_remove(struct i2c_client *client)
{
/*删除设备*/
device_destroy(class_mpu6050, mpu6050_devno); //清除设备
class_destroy(class_mpu6050); //清除类
cdev_del(&mpu6050_chr_dev); //清除设备号
unregister_chrdev_region(mpu6050_devno, DEV_CNT); //取消注册字符设备
return 0;
}
|
.probe函数仅仅注册了一个字符设备,注册字符设备已经在之前的驱动程序中多次使用,这里不再赘述。
.remove函数工作是注销字符设备。
2.5.2.2.3. 实现字符设备操作函数集¶
在.probe函数中添加了一个字符设备,mpu6050的初始化以及转换结果的读取都在这个字符设备的操作函数中实现, 其中最主要是.open 和.read函数。下面是这两个函数的实现。
.open函数实现(我们在.open函数中配置mpu6050),具体代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 | /*字符设备操作函数集,open函数实现*/
static int mpu6050_open(struct inode *inode, struct file *filp)
{
// printk("\n mpu6050_open \n");
/*向 mpu6050 发送配置数据,让mpu6050处于正常工作状态*/
mpu6050_init();
return 0;
}
/*初始化i2c
*返回值,成功,返回0。失败,返回 -1
*/
static int mpu6050_init(void)
{
int error = 0;
/*配置mpu6050*/
error += i2c_write_mpu6050(mpu6050_client, PWR_MGMT_1, 0X00);
error += i2c_write_mpu6050(mpu6050_client, SMPLRT_DIV, 0X07);
error += i2c_write_mpu6050(mpu6050_client, CONFIG, 0X06);
error += i2c_write_mpu6050(mpu6050_client, ACCEL_CONFIG, 0X01);
if (error < 0)
{
/*初始化错误*/
printk(KERN_DEBUG "\n mpu6050_init error \n");
return -1;
}
return 0;
}
/*通过i2c 向mpu6050写入数据
*mpu6050_client:mpu6050的i2c_client结构体。
*address, 数据要写入的地址,
*data, 要写入的数据
*返回值,错误,-1。成功,0
*/
static int i2c_write_mpu6050(struct i2c_client *mpu6050_client, u8 address, u8 data)
{
int error = 0;
u8 write_data[2];
struct i2c_msg send_msg; //要发送的数据结构体
/*设置要发送的数据*/
write_data[0] = address;
write_data[1] = data;
/*发送 iic要写入的地址 reg*/
send_msg.addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
send_msg.flags = 0; //标记为发送数据
send_msg.buf = write_data; //写入的首地址
send_msg.len = 2; //reg长度
/*执行发送*/
error = i2c_transfer(mpu6050_client->adapter, &send_msg, 1);
if (error != 1)
{
printk(KERN_DEBUG "\n i2c_transfer error \n");
return -1;
}
return 0;
}
|
第2行: 在.open函数中仅仅调用了我们自己编写的mpu6050_init函数。
第13-29行: 调用i2c_write_mpu6050函数向mpu6050发送控制参数,控制参数可参考芯片手册,我们重点讲解函数i2c_write_mpu6050实现。
第33行: 参数mpu6050_client是i2c_client类型的结构体,填入mpu6050设备对应的i2c_client结构体即可。
第34行: 参数address,用于设置要写入的地址这个地址是要写入mpu6050的内部地址。
第35行: 参数data, 指定要写入的数据。
第42行: 定义struct i2c_msg结构体,用来装要发送数据。
第45-46行: 写入数据时要先发送写入的地址然后发送要写入的数据,这里用长度为二的数组保存地址和数据
第49-52: i2c_msg结构体填入总线上的地址,标记发送数据,首地址,以及reg长度。
第55行: i2c_write_mpu6050函数,该函数是对i2c_transfer函数的封装,而i2c_transfer是系统提供的i2c设备驱动发送函数,根据之前讲解这个函数最终会调用i2c总线驱动里的函数,最终由i2c总线驱动执行收、发工作。我们这里要做的就是按照规定的格式编写要发送的数据。
mpu6050_read函数源码如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 | /*字符设备操作函数集,.read函数实现*/
static ssize_t mpu6050_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
char data_H;
char data_L;
int error;
short mpu6050_result[6]; //保存mpu6050转换得到的原始数据
i2c_read_mpu6050(mpu6050_client, ACCEL_XOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_XOUT_L, &data_L, 1);
mpu6050_result[0] = data_H << 8;
mpu6050_result[0] += data_L;
i2c_read_mpu6050(mpu6050_client, ACCEL_YOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_YOUT_L, &data_L, 1);
mpu6050_result[1] = data_H << 8;
mpu6050_result[1] += data_L;
i2c_read_mpu6050(mpu6050_client, ACCEL_ZOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_ZOUT_L, &data_L, 1);
mpu6050_result[2] = data_H << 8;
mpu6050_result[2] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_XOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_XOUT_L, &data_L, 1);
mpu6050_result[3] = data_H << 8;
mpu6050_result[3] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_YOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_YOUT_L, &data_L, 1);
mpu6050_result[4] = data_H << 8;
mpu6050_result[4] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_ZOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_ZOUT_L, &data_L, 1);
mpu6050_result[5] = data_H << 8;
mpu6050_result[5] += data_L;
/*将读取得到的数据拷贝到用户空间*/
error = copy_to_user(buf, mpu6050_result, cnt);
if(error != 0)
{
printk("copy_to_user error!");
return -1;
}
return 0;
}
|
.read函数很简单,大致分为如下两部分,重点是i2c_read_mpu6050函数的实现。
第10-38行: 调用i2c_read_mpu6050函数读取mpu6050转换结果。
第41行: 调用copy_to_user函数将转换得到的数据拷贝到用户空间。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | static int i2c_read_mpu6050(struct i2c_client *mpu6050_client, u8 address, void *data, u32 length)
{
int error = 0;
u8 address_data = address;
struct i2c_msg mpu6050_msg[2];
/*设置读取位置i2c_msg*/
mpu6050_msg[0].addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
mpu6050_msg[0].flags = 0; //标记为发送数据
mpu6050_msg[0].buf = &address_data; //写入的首地址
mpu6050_msg[0].len = 1; //写入长度
/*读取i2c_msg*/
mpu6050_msg[1].addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
mpu6050_msg[1].flags = I2C_M_RD; //标记为读取数据
mpu6050_msg[1].buf = data; //读取得到的数据保存位置
mpu6050_msg[1].len = length; //读取长度
error = i2c_transfer(mpu6050_client->adapter, mpu6050_msg, 2);
if (error != 2)
{
printk(KERN_DEBUG "\n i2c_read_mpu6050 error \n");
return -1;
}
return 0;
}
|
它与我们之前讲解的i2c_write_mpu6050函数很相似,结合源码介绍如下:
第1行: 参数mpu6050_client是i2c_client类型的结构体,填入mpu6050设备对应的i2c_client结构体即可。参数address,用于设置要读取的地址这个地址是要读取的mpu6050的内部地址。参数data,保存读取得到的数据。参数length,指定去取长度,单位字节。
第3-5行: 定义的一些变量,其中i2c_msg结构体,读取工作与写入不同,读取时需要先写入要读取的地址然后再执行读取。
第8-17行: 初始化i2c_msg结构体。这里初始化了两个,第一个是写入要读取的地址,第二个执行读取,特别注意的是第一个i2c_msg结构体的flags设置为0(或者I2C_M_RD | I2C_M_REV_DIR_ADDR),第二个i2c_msg结构体的flags设置为1(或者I2C_M_RD)。
第19行: 和i2c_write_mpu6050()函数相同,调用i2c_transfer函数,最终由i2c总线驱动执行收、发工作。
2.5.2.3. mpu6050测试应用程序实现¶
这里编写一个简单地测试应用程序测试驱动是否正常,很简单,只需要打开、读取、打印即可。测试代码如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 | #include <stdio.h>
#include <unistd.h>
#include <fcntl.h>
#include <string.h>
#include <stdlib.h>
int main(int argc, char *argv[])
{
short resive_data[6];
printf("led_tiny test\n");
/*打开文件*/
int fd = open("/dev/I2C1_mpu6050", O_RDWR);
if(fd < 0)
{
printf("open file : %s failed !\n", argv[0]);
return -1;
}
/*读取数据*/
int error = read(fd,resive_data,12);
if(error < 0)
{
printf("write file error! \n");
close(fd);
/*判断是否关闭成功*/
}
printf("AX=%d, AY=%d, AZ=%d ",(int)resive_data[0],(int)resive_data[1],(int)resive_data[2]);
printf("GX=%d, GY=%d, GZ=%d \n \n",(int)resive_data[3],(int)resive_data[4],(int)resive_data[5]);
/*关闭文件*/
error = close(fd);
if(error < 0)
{
printf("close file error! \n");
}
return 0;
}
|
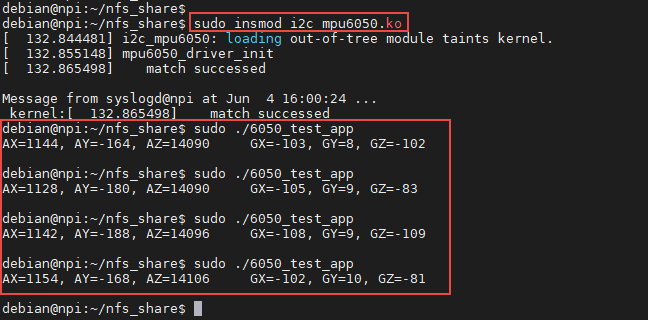
第8行: 保存收到的 mpu6050转换结果数据,依次为 AX(x轴角度), AY, AZ 。GX(x轴加速度), GY ,GZ
第12-17行: 打开MPU6050设备文件。
第20-29行: 读取传感器是并打印
测试应用程序很简单,我们不过多介绍,只说明一点,在驱动的.read函数中我们每次读取了6050的AX, AY, AZ ,GX, GY ,GZ共六个short类型数据,在应用程序中每次读取也要读这么多。
2.5.3. 实验准备¶
2.5.3.1. 编译设备树¶
将 linux_driver/I2c_MPU6050/imx6ull-mmc-npi.dts 拷贝到 内核源码/arch/arm/boot/dts/
如下命令编译设备树:
1 2 | make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- npi_v7_defconfig
make ARCH=arm -j4 CROSS_COMPILE=arm-linux-gnueabihf- dtbs
|
编译成功后生成的设备树文件(.dtb)位于源码目录下的 内核源码/arch/arm/boot/dts, 开发板适配的设备树文件名为 imx6ull-mmc-npi.dts。
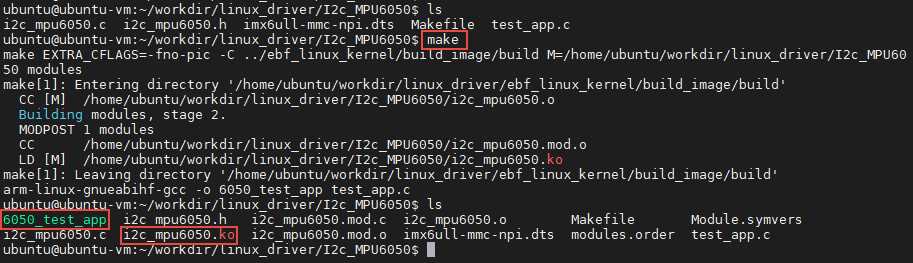
2.5.3.2. 编译驱动程序和应用程序¶
将 linux_driver/I2c_MPU6050/ 拷贝到内核源码同级目录,执行里面的MakeFile,生成i2c_mpu6050.ko和6050_test_app