2. 移植RT-Thread到i.MX RT¶
本章开始,先新建一个基于野火i.MX RT全系列(包含M3/4/7)开发板的的RT-Thread的工程模板,让RT-Thread先跑起来。 以后所有的RT-Thread相关的例程我们都在此模板上修改和添加代码,不用再反反复复地新建。在本书配套的例程中, 每一章的例程对野火i.MX RT的每一个板子都会有一个对应的例程,但是区别都很小, 如果有区别的地方我会在教程里面详细指出,如果没有特别备注那么都是一样的。
2.1. 获取i.MX RT的裸机工程模板¶
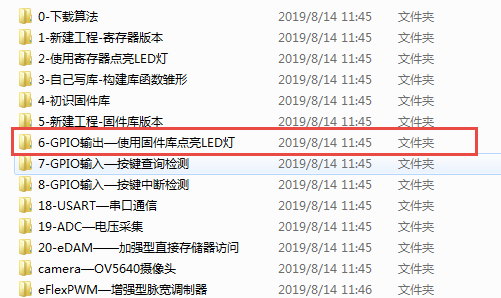
i.MX RT的裸机工程模板我们直接使用野火i.MX RT开发板配套的固件库例程即可。 这里我们选取比较简单的例程—“GPIO输出—使用固件库点亮LED”作为裸机工程模板。 该裸机工程模板均可以在对应板子的书籍配套例程的目录下获取到,下面以野火RT1052PRO板子的光盘目录为例, 具体见 图13-1。
2.2. 下载RT-Thread Nano 源码¶
Nano是Master的精简版,去掉了一些组件和各种开发板的BSP,保留了OS的核心功能,但足够我们使用。 版本已经更新到了3.0.3版本,与Master的版本号一致。
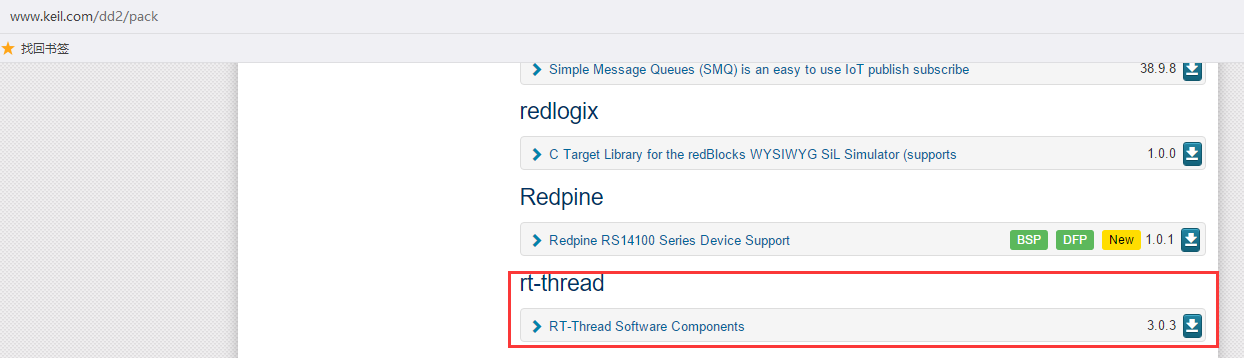
RT-Thread Master的源码可从RT-Thread GitHub仓库地址:https://github.com/RT-Thread/rt-thread下载到, Nano就是从里面扣出来的。RT-Thread官方并没有将抠出来的Nano放到他们的官方网站, 而是作为一个Package放在了KEIL网站—http://www.keil.com/dd2/pack/中, 供用户下载,具体见 图13-2,目前的版本号是3.0.3,如果以后更新到更高的版本则以最新的版本为准。
2.3. 安装RT-Thread Package¶
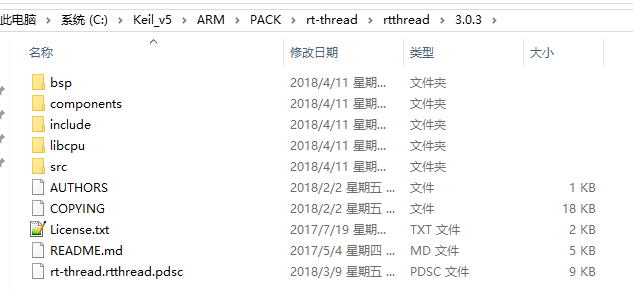
下载下来之后是一个以exe为后缀的文件,点击安装即可,安装目录与你的KEIL安装目录一样,安装成功之后, 可以在KEIL的PACK目录下找到刚刚安装的Package的所有的文件,具体见 图13-3。
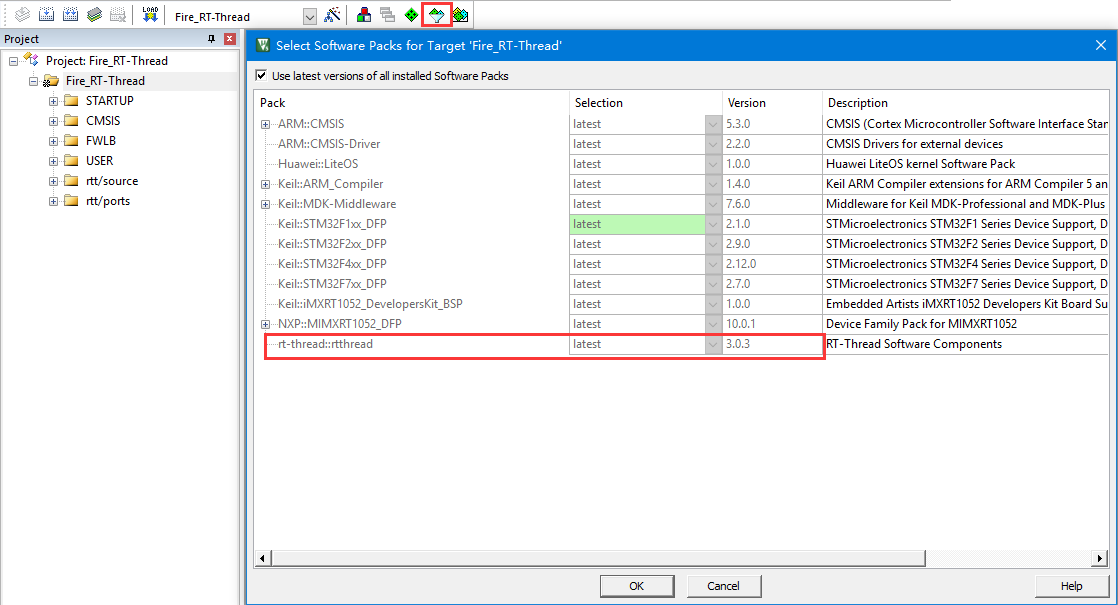
这样安装成功之后,就可以在KEIL里面的软件包管理器中将RT-Thread Nano 直接添加到工程里面,具体见 图13-4。
2.4. 往裸机工程添加RT-Thread源码¶
2.4.1. 拷贝RT-Thread Package到裸机工程根目录¶
使用这种方法打包的RT-Thread 工程,拷贝到一台没有安装RT-Thread Package的电脑上面是使用不了的, 会提示找不到RT-Thread的源文件。鉴于RT-Thread Package容量很小, 我们直接将安装在KEIL PACK 目录下的整个RT-Thread文件夹拷贝到我们的i.MX RT裸机工程里面, 让整个RT-Thread Package 跟随我们的工程一起发布,具体见 图13-5。
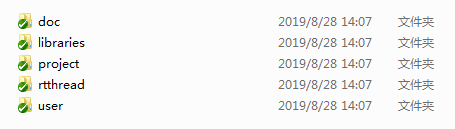
图13-5 中RT-Thread文件夹下就是RT-Thread Nano 的所有东西,该文件夹下的具体内容见表格 13‑1。
表格 13‑1 RT-dhread 文件夹内容组成
文件夹 |
文件夹 |
描述 |
|---|---|---|
rtthread/3.0.3 |
bsp |
板级支持包 |
components/finsh |
RT-Thread组件 |
|
include |
头文件 |
|
include/libc |
||
libcpu/arm/cortex-m0 |
与处理器相关的接口文件 |
|
libcpu/arm/cortex-m3 |
||
libcpu/arm/cortex-m4 |
||
libcpu/arm/cortex-m7 |
||
src |
RT-Thread内核源码 |
2.4.2. 拷贝rtconfig.h文件到user文件夹¶
将RT-Thread/3.0.3/bsp文件夹下面的rtconfig.h配套文件拷贝到工程根目录下面的user文件夹,等下我们需要对这个文件进行修改。
用户可以通过修改这个RT-Thread内核的配置头文件来裁剪RT-Thread的功能, 所以我们把它拷贝一份放在user这个文件夹下面。user,见名之义我们就可以知道里面存放的文件都是用户自己编写的。
2.4.3. 拷贝board.c文件到user文件夹¶
将RT-Thread/3.0.3/bsp文件夹下面的board.c配套文件拷贝到工程根目录下面的user文件夹,等下我们需要对这个board.c进行修改。
2.4.4. RT-Thread文件夹内容简介¶
接下来我们对RT-Thread文件夹下面的内容做个简单的介绍,好让我们能够更顺心地使用RT-Thread。
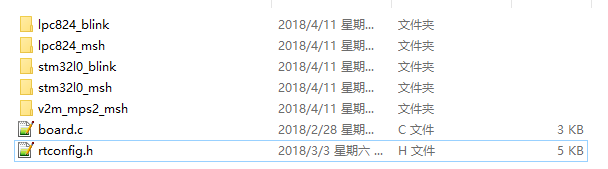
2.4.5. bsp文件夹简介¶
bsp文件夹里面存放的是板级支持包,即board support package的英文缩写。RT-Thread为了推广自己, 会给各种半导体厂商的评估板写好驱动程序,这些驱动程序就放在bsp这个目录下,我们这里用的是nano版本, 只有几款开发板的驱动,具体见 图13-6,如果是Master版本,则存放了非常多的开发板的驱动, 具体见 图13-7。bsp文件夹下面的board.c这是RT-Thread用来初始化开发板硬件的相关函数。 rtconfig.h是RT-Thread功能的配置头文件,里面定义了很多宏,通过这些宏定义,我们可以裁剪RT-Thread的功能。 用户在使用RT-Thread的时候,用户只需要修改board.c和rtconfig.h这两个文件的内容即可, 其它文件我们不需要改动。如果为了减小工程的大小,bsp文件夹下面除了board.c和rtconfig.h这两个文件要保留外,其它的统统可以删除。
2.4.6. components文件夹简介¶
在RT-Thread看来,除了内核,其它第三方加进来的软件都是组件,比如gui、fatfs、lwip和finsh等。 那么这些组件就放在components这个文件夹内,目前nano版本只放了finsh,其它的都被删除了, master版本则放了非常多的组件。finsh是RT-Thread组件里面最具特色的, 它通过串口打印的方式来输出各种信息,方便我们调试程序。
2.4.7. include文件夹简介¶
include目录下面存放的是RT-Thread内核的头文件,是内核不可分割的一部分。
2.4.8. libcpu文件夹简介¶
RT-Thread是一个软件,单片机是一个硬件,RT- Thread要想运行在一个单片机上面, 它们就必须关联在一起,那么怎么关联?还是得通过写代码来关联, 这部分关联的文件叫接口文件,通常由汇编和C联合编写。这些接口文件都是跟硬件密切相关的, 不同的硬件接口文件是不一样的,但都大同小异。编写这些接口文件的过程我们就叫移植, 移植的过程通常由RT-Thread和mcu原厂的人来负责,移植好的这些接口文件就放在libcpu这个文件夹的目录下。 RT-Thread nano目前在libcpu目录下只放了cortex-m0、m3、m4和m7内核的单片机的接口文件, 只要是使用了这些内核的mcu都可以使用里面的接口文件。通常网络上出现的叫“移植某某某RTOS到某某某MCU”的教程, 其实准确来说,不能够叫移植,应该叫使用官方的移植,因为这些跟硬件相关的接口文件,RTOS官方都已经写好了, 我们只是使用而已。我们本章讲的移植也是使用RT-Thread官方的移植, 关于这些底层的移植文件我们已经在第一部分“从0到1教你写RT-Thread内核”有非常详细的讲解,这里我们直接使用即可。
2.4.9. src文件夹简介¶
src目录下面存放的是RT-Thread内核的源文件,是内核的核心,我们在第一部分“从0到1教你写RT-Thread内核”里面讲解的就是这里面内容。
2.4.9.1. 添加RT-Thread源码到工程组文件夹¶
在上一步我们只是将RT-Thread的源码放到了本地工程目录下,还没有添加到开发环境里面的组文件夹里面。
2.4.10. 新建rtt/source和rtt/ports组¶
接下来我们在开发环境里面新建rtt/source和rtt/ports两个组文件夹,其中rtt/source用于存放src文件夹的内容, rtt/ports用于存放libcpu/arm/cortex-m?文件夹的内容,“?”表示3、4或者7, 具体选择哪个得看你使用的是野火哪个型号的i.MX RT开发板,具体见表格 13‑2。
表格 13‑2 野火i.MX RT开发板型号对应RT-Thread的接口文件
野火i.MX RT开发板型号 |
具体芯片型号 |
RT-Thread不同内核的接口文件 |
|---|---|---|
RT1021 |
PIMXRT1021DAG5A |
libcpu/arm/cortex-m7 |
RT1052 |
MIMXRT1052CVL5B |
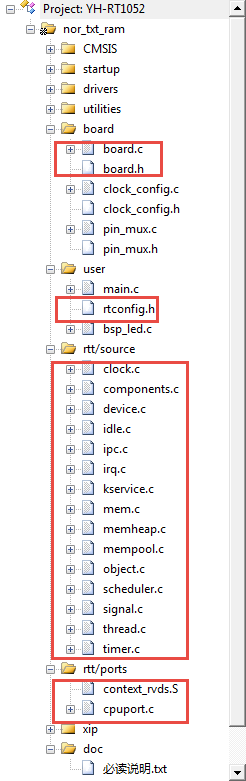
bsp里面的rtconfig.h和board.c添加到user组文件夹下,其中rtconfig.h用于配置RT-Thread的功能, board.c用于存放硬件相关的初始化函数。源码添加完毕之后,具体见 图13-8。
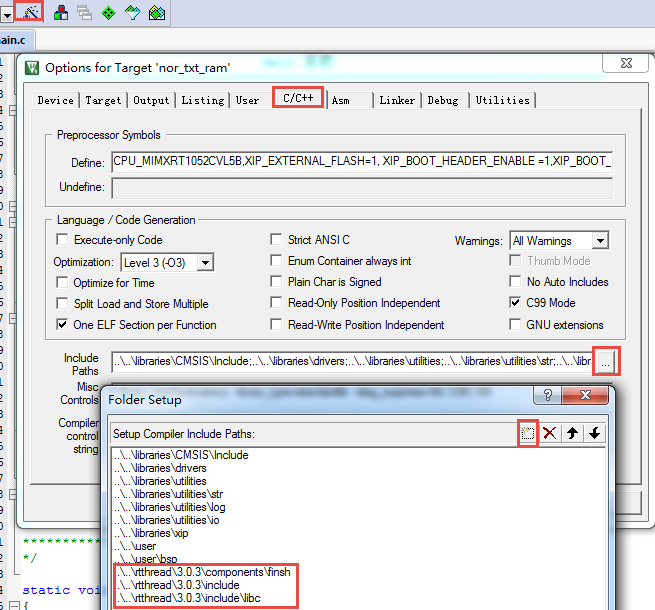
2.4.11. 指定RT-Thread头文件的路径¶
RT-Thread的源码已经添加到开发环境的组文件夹下面,编译的时候需要为这些源文件指定头文件的路径, 不然编译会报错。RT-Thread的源码里面只有RT-Thread3.0.3componentsfinsh、RT-Thread3.0.3include和 RT-Thread3.0.3includelibc这三个文件夹下面有头文件,只需要将这三个头文件的路径在开发环境里面指定即可。 同时我们还将RT-Thread3.0.3bsp里面的rtconfig.h这个头文件拷贝到了工程根目录下的user文件夹下, 所以user的路径也要加到开发环境里面。RT-Thread头文件的路径添加完成后的效果具体见 图13-9。
2.5. 修改rtconfig.h¶
rtconfig.h是直接从RT-Thread/3.0.3/bsp文件夹下面拷贝过来的,该头文件对裁剪整个RT-Thread所需的功能的宏均做了定义, 有些宏定义被使能,有些宏定义被失能,一开始我们只需要配置最简单的功能即可。要想随心所欲的配置RT-Thread的功能, 我们必须对这些宏定义的功能有所掌握,下面我们先简单的介绍下这些宏定义的含义,然后再对这些宏定义进行修改。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 | /* RT-Thread config file */
#ifndef __RTTHREAD_CFG_H__
#define __RTTHREAD_CFG_H__
#include "RTE_Components.h" (1)
// <<< Use Configuration Wizard in Context Menu >>> (2)
// <h>Basic Configuration (3)
// <o>Maximal level of thread priority <8-256>
// <i>Default: 32
#define RT_THREAD_PRIORITY_MAX 32 (3)-1
// <o>OS tick per second
// <i>Default: 1000 (1ms)
#define RT_TICK_PER_SECOND 100 (3)-2
// <o>Alignment size for CPU architecture data access
// <i>Default: 4
#define RT_ALIGN_SIZE 4 (3)-3
// <o>the max length of object name<2-16>
// <i>Default: 8
#define RT_NAME_MAX 8 (3)-4
// <c1>Using RT-Thread components initialization
// <i>Using RT-Thread components initialization
#define RT_USING_COMPONENTS_INIT (3)-5
// </c>
// <c1>Using user main
// <i>Using user main
#define RT_USING_USER_MAIN (3)-6
// </c>
// <o>the size of main thread<1-4086>
// <i>Default: 512
#define RT_MAIN_THREAD_STACK_SIZE 256 (3)-7
// </h>
// <h>Debug Configuration (4)
// <c1>enable kernel debug configuration
// <i>Default: enable kernel debug configuration
//#define RT_DEBUG
// </c>
// <o>enable components initialization debug configuration<0-1>
// <i>Default: 0
#define RT_DEBUG_INIT 0
// <c1>thread stack over flow detect
// <i> Diable Thread stack over flow detect
//#define RT_USING_OVERFLOW_CHECK
// </c>
// </h>
// <h>Hook Configuration (5)
// <c1>using hook
// <i>using hook
//#define RT_USING_HOOK
// </c>
// <c1>using idle hook
// <i>using idle hook
//#define RT_USING_IDLE_HOOK
// </c>
// </h>
// <e>Software timers Configuration (6)
// <i> Enables user timers
#define RT_USING_TIMER_SOFT 0
#if RT_USING_TIMER_SOFT == 0
#undef RT_USING_TIMER_SOFT
#endif
// <o>The priority level of timer thread <0-31>
// <i>Default: 4
#define RT_TIMER_THREAD_PRIO 4
// <o>The stack size of timer thread <0-8192>
// <i>Default: 512
#define RT_TIMER_THREAD_STACK_SIZE 512
// <o>The soft-timer tick per second <0-1000>
// <i>Default: 100
#define RT_TIMER_TICK_PER_SECOND 100
// </e>
// <h>IPC(Inter-process communication) Configuration (7)
// <c1>Using Semaphore
// <i>Using Semaphore
#define RT_USING_SEMAPHORE (7)-1
// </c>
// <c1>Using Mutex
// <i>Using Mutex
//#define RT_USING_MUTEX (7)-2
// </c>
// <c1>Using Event
// <i>Using Event
//#define RT_USING_EVENT (7)-3
// </c>
// <c1>Using MailBox
// <i>Using MailBox
#define RT_USING_MAILBOX (7)-5
// </c>
// <c1>Using Message Queue
// <i>Using Message Queue
//#define RT_USING_MESSAGEQUEUE (7)-5
// </c>
// </h>
// <h>Memory Management Configuration (8)
// <c1>Using Memory Pool Management
// <i>Using Memory Pool Management
//#define RT_USING_MEMPOOL (8)-1
// </c>
// <c1>Dynamic Heap Management
// <i>Dynamic Heap Management
//#define RT_USING_HEAP (8)-2
// </c>
// <c1>using small memory
// <i>using small memory
#define RT_USING_SMALL_MEM (8)-3
// </c>
// <c1>using tiny size of memory
// <i>using tiny size of memory
//#define RT_USING_TINY_SIZE (8)-4
// </c>
// </h>
// <h>Console Configuration (9)
// <c1>Using console
// <i>Using console
#define RT_USING_CONSOLE
// </c>
// <o>the buffer size of console <1-1024>
// <i>the buffer size of console
// <i>Default: 128 (128Byte)
#define RT_CONSOLEBUF_SIZE 128
// <s>The device name for console
// <i>The device name for console
// <i>Default: uart1
#define RT_CONSOLE_DEVICE_NAME "uart2"
// </h>
#if defined(RTE_FINSH_USING_MSH) (10)
#define RT_USING_FINSH
#define FINSH_USING_MSH
#define FINSH_USING_MSH_ONLY
// <h>Finsh Configuration
// <o>the priority of finsh thread <1-7>
// <i>the priority of finsh thread
// <i>Default: 6
#define __FINSH_THREAD_PRIORITY 5
#define FINSH_THREAD_PRIORITY (RT_THREAD_PRIORITY_MAX / 8 * __FINSH_THREAD_PRIORITY + 1)
// <o>the stack of finsh thread <1-4096>
// <i>the stack of finsh thread
// <i>Default: 4096 (4096Byte)
#define FINSH_THREAD_STACK_SIZE 512
// <o>the history lines of finsh thread <1-32>
// <i>the history lines of finsh thread
// <i>Default: 5
#define FINSH_HISTORY_LINES 1
// <c1>Using symbol table in finsh shell
// <i>Using symbol table in finsh shell
#define FINSH_USING_SYMTAB
// </c>
// </h>
#endif
#if defined(RTE_USING_DEVICE) (11)
#define RT_USING_DEVICE
#endif
// <<< end of configuration section >>> (12)
#endif
|
代码清单13-1(1) :头文件RTE_Components.h是在MDK中添加RT-Thead Package时由MDK自动生成的, 目前我们没有使用MDK中自带的RT-Thread的Package,所以这个头文件不存在,如果包含了该头文件,编译的时 候会报错,等下修改rtconfig.h的时候需要注释掉该头文件。
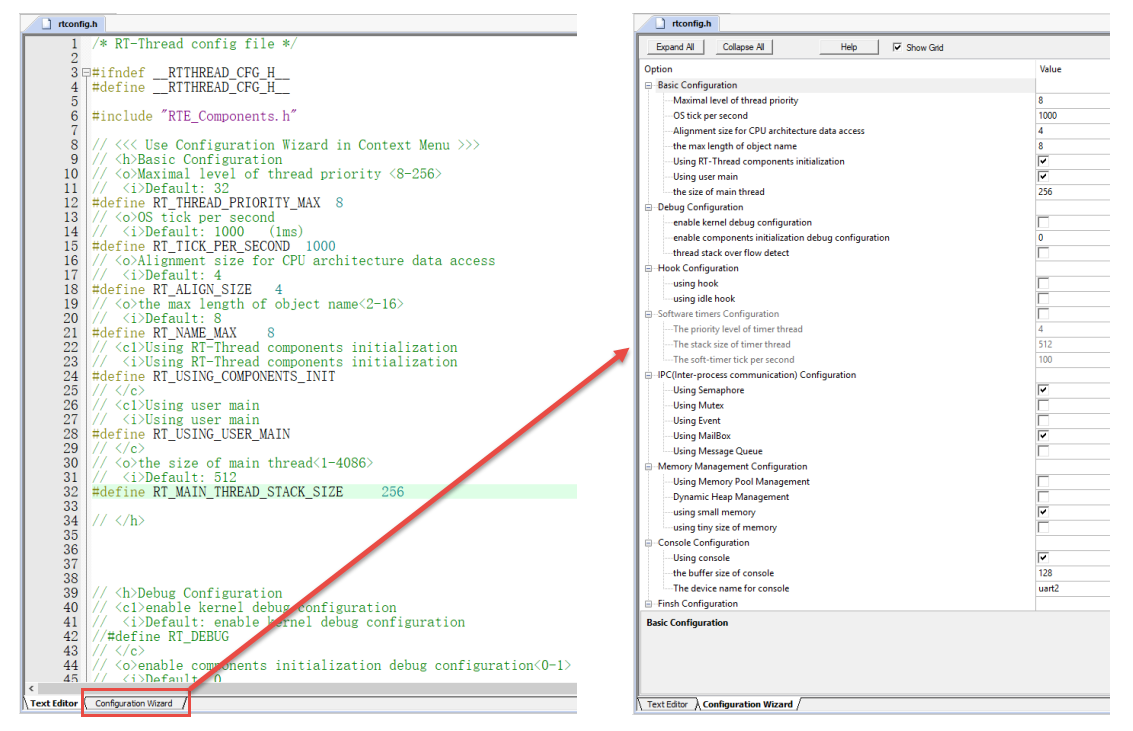
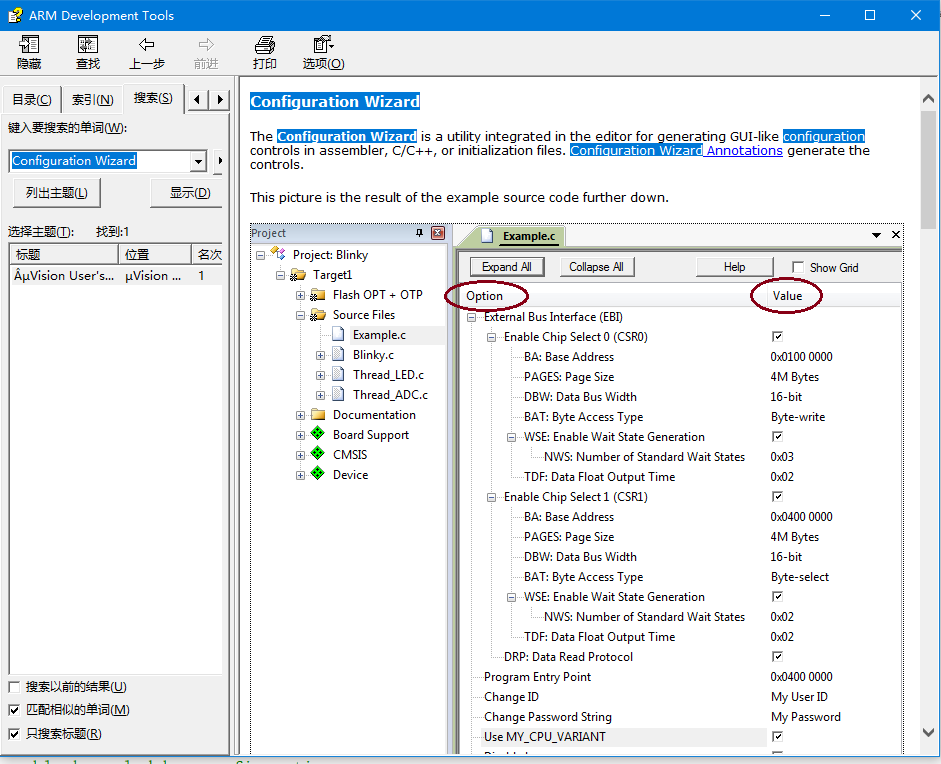
代码清单13-1(2) :Use Configuration Wizard in Context Menu:在上下文中使用 配置向导来配置rtconfig.h中的宏定义。接下来代码中夹杂的“<h> </h>”、“<o>”“<i>”、“<c1> </c>”和“<e> </e>”这些符号是MDK自带的配置向导控制符号,使用这些符号控制的代码可以生成一个对应的图形界面的配置 向导,rtconfig.h对应的配置向导具体见 图13-10。有关配置向导的语法,可在MDK的帮助文档里面找到, 在搜索栏输入Configuration Wizard 即可搜索到,具体见 图13-11。具体每一个符号的语法我们这里不做细讲, 有兴趣的可以深究下。 对于我个人,还是倾向于直接修改rtconfig.h中的源码, 而不是通过这个配置向导来修改,就好比一个老烟枪抽烟的时候你要给他加个过滤嘴,那是不可能的,这辈子都是不可能的。
代码清单13-1(3) :RT-Thread的基本配置,要想RT-Thread准确无误的跑起来,这些基本配置必须得有且正确。
代码清单13-1(3)-1 :RT_THREAD_PRIORITY_MAX这个宏表示RT-Thread支持多少个优先级, 取值范围为8~~~256,默认为32。
代码清单13-1(3)-2:RT_TICK_PER_SECOND 表示操作系统每秒钟有多少个tick,tick即是操 作系统的时钟周期,默认为1000,即操作系统的时钟周期tick等于1ms。
代码清单13-1(3)-3:RT_ALIGN_SIZE这个宏表示CPU处理的数据需要多少个字节对齐,默认为4个字节。
代码清单13-1(3)-4:RT_NAME_MAX这个宏表示内核对象名字的最大长度,取值范围为2~~~16,默认为8。
代码清单13-1(3)-5:使用RT-Thread组件初始化,默认使能。
代码清单13-1(3)-6:使用用户main函数,默认打开。
代码清单13-1(3)-7:main线程栈大小,取值范围为1~~~4086,单位为字节,默认为512。
代码清单13-1(4):调试配置。包括了内核调试配置,组件调试配置和线程栈溢出检测,目前全部关闭。
代码清单13-1(5):钩子函数配置,目前全部关闭。
代码清单13-1(6):软件定时器配置,目前关闭,不使用软件定时器。
代码清单13-1(7):内部通信配置,包括信号量、互斥量、事件、邮箱和消息队列,根据需要配置。
代码清单13-1(8):内存管理配置。
代码清单13-1(8)-1:RT_USING_MEMPOOL这个宏用于表示是否使用内存池,目前关闭,不使用内存池。
代码清单13-1(8)-2:RT_USING_HEAP这个宏用于表示是否堆,目前关闭,不使用堆。
代码清单13-1(8)-3:RT_USING_SMALL_MEM这个宏用于表示是否使用小内存,目前使能。
代码清单13-1(8)-4:RT_USING_TINY_SIZE这个宏用于表示是否使用极小内存,目前关闭,不使用。
代码清单13-1(9):控制台配置。控制台即是rt_kprintf()函数调试输出的设备,通常使用串口。
代码清单13-1(10):FINSH配置。
代码清单13-1(11):设备配置。
代码清单13-1(12):rtconfig.h配置结束。
rtconfig.h头文件的内容修改的不多,具体是:注释掉头文件RTE_Components.h、修改了 RT_THREAD_PRIORITY_MAX、RT_TICK_PER_SECOND和RT_MAIN_THREAD_STACK_SIZE这三个宏 的大小,具体见 代码清单13-2 的高亮部分。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 | /* RT-Thread config file */
#ifndef __RTTHREAD_CFG_H__
#define __RTTHREAD_CFG_H__
//#include "RTE_Components.h"
// <<< Use Configuration Wizard in Context Menu >>>
// <h>Basic Configuration
// <o>Maximal level of thread priority <8-256>
// <i>Default: 32
#define RT_THREAD_PRIORITY_MAX 8
// <o>OS tick per second
// <i>Default: 1000 (1ms)
#define RT_TICK_PER_SECOND 1000
// <o>Alignment size for CPU architecture data access
// <i>Default: 4
#define RT_ALIGN_SIZE 4
// <o>the max length of object name<2-16>
// <i>Default: 8
#define RT_NAME_MAX 8
// <c1>Using RT-Thread components initialization
// <i>Using RT-Thread components initialization
#define RT_USING_COMPONENTS_INIT
// </c>
// <c1>Using user main
// <i>Using user main
#define RT_USING_USER_MAIN
// </c>
// <o>the size of main thread<1-4086>
// <i>Default: 512
#define RT_MAIN_THREAD_STACK_SIZE 512
// </h>
// <h>Debug Configuration
// <c1>enable kernel debug configuration
// <i>Default: enable kernel debug configuration
//#define RT_DEBUG
// </c>
// <o>enable components initialization debug configuration<0-1>
// <i>Default: 0
#define RT_DEBUG_INIT 0
// <c1>thread stack over flow detect
// <i> Diable Thread stack over flow detect
//#define RT_USING_OVERFLOW_CHECK
// </c>
// </h>
// <h>Hook Configuration
// <c1>using hook
// <i>using hook
//#define RT_USING_HOOK
// </c>
// <c1>using idle hook
// <i>using idle hook
//#define RT_USING_IDLE_HOOK
// </c>
// </h>
// <e>Software timers Configuration
// <i> Enables user timers
#define RT_USING_TIMER_SOFT 0
#if RT_USING_TIMER_SOFT == 0
#undef RT_USING_TIMER_SOFT
#endif
// <o>The priority level of timer thread <0-31>
// <i>Default: 4
#define RT_TIMER_THREAD_PRIO 4
// <o>The stack size of timer thread <0-8192>
// <i>Default: 512
#define RT_TIMER_THREAD_STACK_SIZE 512
// <o>The soft-timer tick per second <0-1000>
// <i>Default: 100
#define RT_TIMER_TICK_PER_SECOND 100
// </e>
// <h>IPC(Inter-process communication) Configuration
// <c1>Using Semaphore
// <i>Using Semaphore
#define RT_USING_SEMAPHORE
// </c>
// <c1>Using Mutex
// <i>Using Mutex
//#define RT_USING_MUTEX
// </c>
// <c1>Using Event
// <i>Using Event
//#define RT_USING_EVENT
// </c>
// <c1>Using MailBox
// <i>Using MailBox
#define RT_USING_MAILBOX
// </c>
// <c1>Using Message Queue
// <i>Using Message Queue
//#define RT_USING_MESSAGEQUEUE
// </c>
// </h>
// <h>Memory Management Configuration
// <c1>Using Memory Pool Management
// <i>Using Memory Pool Management
//#define RT_USING_MEMPOOL
// </c>
// <c1>Dynamic Heap Management
// <i>Dynamic Heap Management
#define RT_USING_HEAP
// </c>
// <c1>using small memory
// <i>using small memory
#define RT_USING_SMALL_MEM
// </c>
// <c1>using tiny size of memory
// <i>using tiny size of memory
//#define RT_USING_TINY_SIZE
// </c>
// </h>
// <h>Console Configuration
// <c1>Using console
// <i>Using console
#define RT_USING_CONSOLE
// </c>
// <o>the buffer size of console <1-1024>
// <i>the buffer size of console
// <i>Default: 128 (128Byte)
#define RT_CONSOLEBUF_SIZE 128
// <s>The device name for console
// <i>The device name for console
// <i>Default: uart1
#define RT_CONSOLE_DEVICE_NAME "uart2"
// </h>
#if defined(RTE_FINSH_USING_MSH)
#define RT_USING_FINSH
#define FINSH_USING_MSH
#define FINSH_USING_MSH_ONLY
// <h>Finsh Configuration
// <o>the priority of finsh thread <1-7>
// <i>the priority of finsh thread
// <i>Default: 6
#define __FINSH_THREAD_PRIORITY 5
#define FINSH_THREAD_PRIORITY (RT_THREAD_PRIORITY_MAX / 8 * __FINSH_THREAD_PRIORITY + 1)
// <o>the stack of finsh thread <1-4096>
// <i>the stack of finsh thread
// <i>Default: 4096 (4096Byte)
#define FINSH_THREAD_STACK_SIZE 512
// <o>the history lines of finsh thread <1-32>
// <i>the history lines of finsh thread
// <i>Default: 5
#define FINSH_HISTORY_LINES 1
// <c1>Using symbol table in finsh shell
// <i>Using symbol table in finsh shell
#define FINSH_USING_SYMTAB
// </c>
// </h>
#endif
#if defined(RTE_USING_DEVICE)
#define RT_USING_DEVICE
#endif
// <<< end of configuration section >>>
#endif
|
2.6. 修改board.c¶
board.c是直接从RT-Thread/3.0.3/bsp文件夹下面拷贝过来的,里面存放的是与硬件相关的初始化函数, 整个 board.c中的内容具体见 代码清单13-3。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 | #ifdef RT_USING_HEAP //(1)
#if defined(RT_USING_MEMHEAP) && defined(RT_USING_MEMHEAP_AS_HEAP)
/* 从外部SDRAM里面分配一部分静态内存来作为rtt的堆空间,这里配置为30MB */
#define SDRAM_BEGIN (0x80000000u)
#define SDRAM_END (0x81D00000u)
#define LCD_FB_BASE (0x81D10000u)
#elif defined(RT_USING_SMALL_MEM)
/* 从内部SRAM(即DTCM)里面分配一部分静态内存来作为rtt的堆空间,这里配置为4KB */
#define RT_HEAP_SIZE 1024
static uint32_t rt_heap[RT_HEAP_SIZE];
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
#endif
/**
* @brief 开发板硬件初始化函数
* @param 无
* @retval 无
*
* @attention
* RTT把开发板相关的初始化函数统一放到board.c文件中实现,
* 当然,你想把这些函数统一放到main.c文件也是可以的。
*/
void rt_hw_board_init(void) //(2)
{
/* 初始化内存管理单元 */
BOARD_ConfigMPU();
/* 初始化开发板引脚 */
BOARD_InitPins();
/* 初始化开发板时钟 */
BOARD_BootClockRUN();
/* 初始化调试串口 */
BOARD_InitDebugConsole();
PRINTF("*****欢迎使用 野火i.MX RT1052 开发板*****\r\n\n\n\n\n");
LED_GPIO_Config();
/* 将开发板硬件相关的初始化放上面 */
/* 初始化SysTick */
SysTick_Config( SystemCoreClock / RT_TICK_PER_SECOND );
/* Call components board initial (use INIT_BOARD_EXPORT()) */
ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init(); // (2)-①
endif
if defined(RT_USING_CONSOLE) && defined(RT_USING_DEVICE)
rt_console_set_device(RT_CONSOLE_DEVICE_NAME); // (2)-②
endif
ifdef RT_USING_HEAP
if defined(RT_USING_MEMHEAP) && defined(RT_USING_MEMHEAP_AS_HEAP)
PRINTF("sdram heap, begin: 0x%p, end: 0x%p\n", SDRAM_BEGIN, SDRAM_END); // (2)-③
rt_system_heap_init((void *)SDRAM_BEGIN, (void *)SDRAM_END);
elif defined(RT_USING_SMALL_MEM)
PRINTF("sram heap, begin: 0x%p, end: 0x%p\n", HEAP_BEGIN, HEAP_END);
rt_system_heap_init((void *)rt_heap_begin_get, (void *)rt_heap_end_get);
#endif
#endif
}
/**
* @brief SysTick中断服务函数
* @param 无
* @retval 无
*
* @attention
*
*/ //(3)
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
|
代码清单13-3(1):RT-Thread堆配置,如果同时定义了RT_USING_MEMHEAP和 RT_USING_MEMHEAP_AS_HEAP这两个宏, 表示RT-Thread里面创建内核对象时使用动态内存分配方案。堆可以是内部的SRAM也可以是外部的SRAM或SDRAM, 目前的方法是从外部SDRAM里面分配一部分静态内存来作为堆空间,这里配置为30MB。 rt_heap_begin_get()和rt_heap_end_get()这两个函数表示堆的起始地址和结束地址。 这两个函数前面的宏RT_WEAK的原型是关键字__weak,表示若定义, 即其它地方定义了rt_heap_begin_get()和rt_heap_end_get()这两个函数实体,被__weak修饰的函数就会被覆盖。
RT_USING_USER_MAIN和RT_USING_HEAP这两个宏在rtconfig.h中定义,RT_USING_USER_MAIN默认使能, 通过使能或者失能RT_USING_HEAP这个宏来选择使用静态或者动态内存。无论是使用静态还是动态内存方案, 使用的都是内部的SRAM,区别是使用的内存是在程序编译的时候分配还是在运行的时候分配。
2.6.1. rt_hw_board_init()函数¶
代码清单13-3(2):RT-Thread启动的时候会调用一个名为rt_hw_board_init()的函数, 从函数名称我们可以知道它是用来初始化开发板硬件的,比如时钟,比如串口等,具体初始化什么由用户选择。 当这些硬件初始化好之后,RT-Thread才继续往下启动。至于RT-Thread是哪个文件里面的哪个函数会调用rt_hw_board_init(), 我们在本章先不细讲,留到接下来的“RT-Thread的启动流程”章节再深究, 这里我们只需要知道我们用户要自己编写一个rt_hw_board_init()的函数供RT-Thread启动的时候调用即可。
代码清单13-3(2)- ①:这部分是RT-Thread为开发板组件提供的一个初始化函数,该函数在components.c里面实现, 由rtconfig.h里面的宏RT_USING_COMPONENTS_INIT决定是否调用,默认是开启。
代码清单13-3(2)- ②:rt_console_set_device()是RT- Thread提供的一个控制台设置函数,它将指定rt_kprintf()函数的输出内容具体从什么设备打印出来。该函数在kservice.c里面实现, 由rtconfig.h里面的RT_USING_CONSOLE和RT_USING_DEVICE这两个宏决定是否调用,目前我们暂时不用。
代码清单13-3(2)- ③:rt_system_heap_init()是RT-Thread提供的一个内存初始化函数, 只有在使用RT-Thread提供的动态内存分配函数时才需要使用到。该函数在mem.c里面实现, 由rtconfig.h里面的RT_USING_HEAP和RT_USING_USER_MAIN这两个决定是否调用,目前我们暂时不用。
2.6.2. SysTick_Handler()函数¶
代码清单13-3(3):SysTick中断服务函数是一个非常重要的函数, RT-Thread所有跟时间相关的事情都在里面处理,具体实现见 代码清单13-4。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | /**
* @brief SysTick中断服务函数
* @param 无
* @retval 无
*
*/
void SysTick_Handler(void)
{
/* 进入中断 */
rt_interrupt_enter(); (1)
/* 更新时基 */
rt_tick_increase(); (2)
/* 离开中断 */
rt_interrupt_leave(); (3)
}
|
代码清单13-4 (1):进入中断,对中断计数器rt_interrupt_nest加1操作。
代码清单13-4(2):rt_tick_increase()用于更新时基,实现时间片,扫描系统定时器。
代码清单13-4(3) :退出中断,对中断计数器rt_interrupt_nest减1操作。
2.6.2.1. board.c文件修改¶
board.c文件内容修改的并不多,具体见 代码清单13-5。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 | #include "board.h" //修改(1)
#include "fsl_common.h"
#include "fsl_debug_console.h"
#include "board.h"
#include "pin_mux.h"
#include <rthw.h>
#include <rtthread.h>
#include "./led/bsp_led.h"
#include "fsl_lpuart.h"
#if 0 //修改(2)
#define _SCB_BASE (0xE000E010UL)
#define _SYSTICK_CTRL (*(rt_uint32_t *)(_SCB_BASE + 0x0))
#define _SYSTICK_LOAD (*(rt_uint32_t *)(_SCB_BASE + 0x4))
#define _SYSTICK_VAL (*(rt_uint32_t *)(_SCB_BASE + 0x8))
#define _SYSTICK_CALIB (*(rt_uint32_t *)(_SCB_BASE + 0xC))
#define _SYSTICK_PRI (*(rt_uint8_t *)(0xE000ED23UL))
// Updates the variable SystemCoreClock and must be called
// whenever the core clock is changed during program execution.
extern void SystemCoreClockUpdate(void);
// Holds the system core clock, which is the system clock
// frequency supplied to the SysTick timer and the processor
// core clock.
extern uint32_t SystemCoreClock;
static uint32_t _SysTick_Config(rt_uint32_t ticks)
{
if ((ticks - 1) > 0xFFFFFF) {
return 1;
}
_SYSTICK_LOAD = ticks - 1;
_SYSTICK_PRI = 0xFF;
_SYSTICK_VAL = 0;
_SYSTICK_CTRL = 0x07;
return 0;
}
#endif
/***********************************************************************
* Variables
**********************************************************************/
/***********************************************************************
* Code
*********************************************************************/
/* Get debug console frequency. */
uint32_t BOARD_DebugConsoleSrcFreq(void)//增加板级系统时钟相关初始化
{
/*
省略配置时钟内容
*/
}
/* Initialize debug console. */
void BOARD_InitDebugConsole(void)
{
uint32_t uartClkSrcFreq = BOARD_DebugConsoleSrcFreq();
DbgConsole_Init(BOARD_DEBUG_UART_BASEADDR, BOARD_DEBUG_UART_BAUDRATE, BOARD_DEBUG_UART_TYPE, uartClkSrcFreq);
}
/* MPU configuration. */
void BOARD_ConfigMPU(void)
{
/*
省略配置MPU内容
*/
}
#if 0 //修改(3)
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
#define RT_HEAP_SIZE 1024
static uint32_t rt_heap[RT_HEAP_SIZE]; // heap default size: 4K(1024 * 4)
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
#endif
#ifdef RT_USING_HEAP
#if defined(RT_USING_MEMHEAP) && defined(RT_USING_MEMHEAP_AS_HEAP)
/* 从外部SDRAM里面分配一部分静态内存来作为rtt的堆空间,这里配置为30MB */
#define SDRAM_BEGIN (0x80000000u)
#define SDRAM_END (0x81D00000u)
#define LCD_FB_BASE (0x81D10000u)
#elif defined(RT_USING_SMALL_MEM)
/* 从内部SRAM(即DTCM)里面分配一部分静态内存来作为rtt的堆空间,这里配置为4KB */
#define RT_HEAP_SIZE 1024
static uint32_t rt_heap[RT_HEAP_SIZE];
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
#endif
/**
* This function will initial your board.
*/
void rt_hw_board_init()
{
#if 0 //修改(4)
/* System Clock Update */
SystemCoreClockUpdate();
/* System Tick Configuration */
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
#endif
// /* 初始化内存管理单元 */
/* 初始化内存管理单元 */
BOARD_ConfigMPU();
/* 初始化开发板引脚 */
BOARD_InitPins();
/* 初始化开发板时钟 */
BOARD_BootClockRUN();
/* 初始化调试串口 */
BOARD_InitDebugConsole();
PRINTF("*****欢迎使用 野火i.MX RT1052 开发板*****\r\n");
LED_GPIO_Config();
/* 将开发板硬件相关的初始化放上面 */
/* 初始化SysTick */
SysTick_Config( SystemCoreClock / RT_TICK_PER_SECOND );
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_CONSOLE) && defined(RT_USING_DEVICE)
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
#if 0
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
#endif
#ifdef RT_USING_HEAP
#if defined(RT_USING_MEMHEAP) && defined(RT_USING_MEMHEAP_AS_HEAP)
//PRINTF("sdram heap, begin: 0x%p, end: 0x%p\n", SDRAM_BEGIN, SDRAM_END);
rt_system_heap_init((void *)SDRAM_BEGIN, (void *)SDRAM_END);
#elif defined(RT_USING_SMALL_MEM)
PRINTF("sram heap, begin: 0x%p, end: 0x%p\n", HEAP_BEGIN, HEAP_END);
rt_system_heap_init((void *)rt_heap_begin_get, (void *)rt_heap_end_get);
#endif
#endif
}
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
|
代码清单13-5修改(1):在user目录下新建一个board.h头文件,用来包含固件库和BSP相关的头文件和存放board.c里面的函数声明。并且添加原有的头文件。
代码清单13-5修改(2):SysTick相关的寄存器和初始化函数统统屏蔽掉,将由固件库文件core_cm3/4/7里面的替代。并增加 现有板子的SysTick的配置。
代码清单13-5修改(3):将原有的堆地址空间全部注释掉,从新定义新的堆空间起始地址及基地址。
代码清单13-5修改(4):增加板级驱动。
2.7. 修改main.c¶
我们将原来裸机工程里面main.c的文件内容全部删除,新增如下内容,具体见 代码清单13-6。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 | /**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2019-xx-xx
* @brief RT-Thread系统 工程模板
*********************************************************************
* @attention
*
* 实验平台:基于野火i.MX RT全系列开发板
* 论坛 :http://www.firebbs.cn
* 淘宝 :https://fire-stm32.taobao.com
*
**********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
#include "board.h"
#include "fsl_debug_console.h"
#include "rtthread.h"
/*
*************************************************************************
* 变量
*************************************************************************
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
/*
*************************************************************************
* main 函数
*************************************************************************
*/
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
/* 暂时没有在main线程里面创建线程应用线程 */
}
/********************************END OF FILE****************************/
|
2.8. 下载验证¶
将程序编译好,用DAP仿真器把程序下载到野火i.MX RT开发板(具体型号根据你买的板子而定,每个型号的板子都配套有对应的程序), 一看,啥现象都没有,一脸懵逼,我说,你急个肾,目前我们还没有在main线程里面创建应用线程,但是系统是已经跑起来了, 只有默认的空闲线程和main线程。要想看现象,得自己在main创建里面应用线程,如果创建线程,请看下一章“创建线程”。