33. LPTIM—低功耗定时器¶
本章参考资料:《STM32F76xxx参考手册》、《STM32H743_H750参考手册》、库帮助文档《STM32F779xx_User_Manual.chm》、《STM32H753xx_User_Manual.chm》。
学习本章时,配合《STM32F76xxx参考手册》、《STM32H743_H750参考手册》低功耗定时器章节一起阅读,效果会更佳,特别是涉及到寄存器说明的部分。
33.1. 低功耗定时器¶
LPTIM 是一个 16 位定时器,顾名思义他就是可以实现低功耗应用的一个特殊定时器。由于时钟源的多样性,LPTIM 能够在除待机模式以外的所有电源模式下保持运行。即使没有内部时钟源, LPTIM 也能运行,鉴于这一点,可将其用作“脉冲计数器”,这种脉冲计数器在某些应用中十分有用。此外, LPTIM 还能将系统从低功耗模式唤醒,因此非常适合实现“超时功能”,而且功耗极低。
LPTIM 引入了一个灵活的时钟方案,该方案能够提供所需的功能和性能,同时还能最大程度地降低功耗。
LPTIM时基单元包含一个16位自动重载计数器ARR,一个16位的递增计数器CNT,一个3位可编程预分频器可以采用8种分频系数(1、2、4、8、16、32、64、128),预分频器时钟源有多种可选,有内部时钟源: LSE、 LSI、 HSI 或 APB 时钟、外部时钟ULPTIM 输入的外部时钟源(在没有 LP 振荡器运行的情况下工作,由脉冲计数器应用使用)。
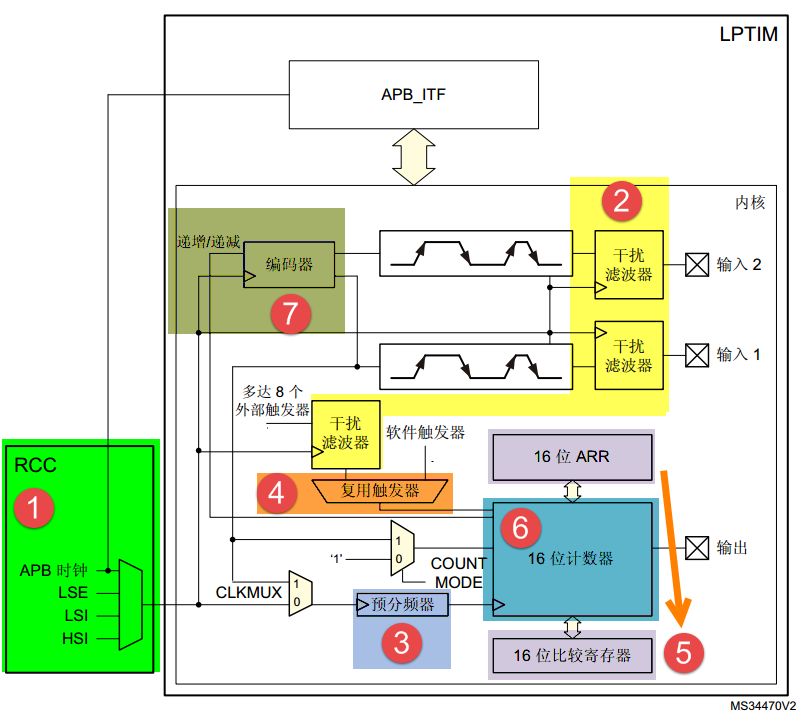
33.2. 低功耗定时器功能框图¶
低功耗定时器功能框图包含了低功耗定时器最核心内容,掌握了功能框图,对低功耗定时器就有一个整体的把握,在编程时思路就非常清晰,见 高级控制定时器功能框图。
高级控制定时器功能框图
33.2.1. ①时钟源¶
低功耗定时器有多个时钟源可选:
内部时钟源APB时钟,PCLK1=45MHz(默认)
内部时钟LSE
内部时钟LSI
内部时钟HIS
外部输入引脚提供时钟
当通过外部时钟源提供时钟时,LPTIM可以在下述两种可能配置中的其中一种配置下运行:
LPTIM 通过外部信号提供时钟,但同时通过 APB 或 LSE、 LSI 和 HSI等任何其他内置振荡器为 LPTIM 提供内部时钟信号。
LPTIM 仅由外部时钟源通过外部输入提供时钟。此配置可在进入低功耗模式后所有内置振荡器关闭时,用于实现超时功能或脉冲计数器功能。
对 CKSEL 和 COUNTMODE 位进行编程,可控制 LPTIM使用外部时钟源还是内部时钟源。
当使用外部时钟源时,可使用 CKPOL位选择外部时钟信号的有效边沿。如果上升沿和下降沿均为有效边沿, 则还应提供内部时钟信号(第一种配置)。在这种情况下,内部时钟信号频率应至少为外部时钟信号频率的五倍。
33.2.2. ②干扰滤波器¶
LPTIM 输入(外部或内部)由数字滤波器保护,避免任何毛刺和噪声干扰在 LPTIM 内部传播,从而防止产生意外计数或触发。在激活数字滤波器之前,首先应向 LPTIM 提供内部时钟源,这是保证滤波器正常工作的必要条件。特别注意不提供内部时钟信号时,必须通过将 CKFLT 和 TRGFLT 位设为 0 来停用数字滤波器。在这种情况下,可使用外部模拟滤波器来防止 LPTIM 外部输入产生干扰。
数字滤波器分为两组:
第一组数字滤波器保护 LPTIM外部输入。数字滤波器的敏感性由 CKFLT 位控制。
第二组数字滤波器保护 LPTIM 内部触发输入。数字滤波器的敏感性由 TRGFLT 位控制。
数字滤波器的敏感性以组为单位进行控制。无法单独配置同一组内各个数字滤波器的敏感性。滤波器的敏感性会影响相同的连续采样的数量,在其中一个 LPTIM 输入上检测到此类连续采样时,才能将某信号电平变化视为有效切换。干扰滤波器时序图 给出了编程 2 个连续采样时,干扰滤波器的时序图。
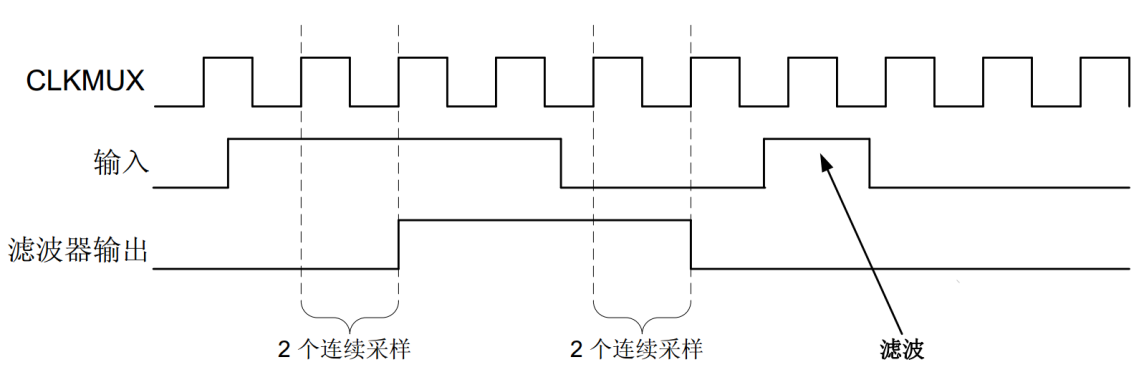
干扰滤波器时序图
33.2.3. ③预分频器¶
LPTIM 16 位计数器前面要有一个可配置的 2 次幂预分频器。预分频器的分频比由 PRESC[2:0]3 位域进行控制。表 33‑1预分频器的分频比列出了所有可能的分频比:
表 33‑1预分频器的分频比
编程 |
分频系数 |
|---|---|
000 |
/1 |
001 |
/2 |
010 |
/4 |
011 |
/8 |
100 |
/16 |
101 |
/32 |
110 |
/64 |
111 |
/128 |
33.2.4. ④触发多路复用器¶
TRIGEN[1:0] 等于“ 00”时, LPTIM 计数器会在通过软件将 CNTSTRT 位或 SNGSTRT位其中之一置 1 后立即启动。
TRIGEN[1:0] 的其余三个可能的值用于配置触发输入使用的有效边沿。 LPTIM 计数器会在检测到有效边沿后立即启动。
TRIGEN[1:0] 不等于“ 00”时, TRIGSEL[2:0] 用于选择使用 8 个触发输入中的哪一个来启动计数器。
外部触发信号视为 LPTIM 的异步信号。因此,检测到触发信号后,由于同步问题,需要延迟两个计数器时钟周期,定时器才能开始运行。
外部触发信号视为 LPTIM 的异步信号。因此,检测到触发信号后,由于同步问题,需要延迟两个计数器时钟周期,定时器才能开始运行。必须使能定时器,才能将 SNGSTRT/CNTSTRT 位置 1。当定时器禁止时,对这些位执行的任何写操作都将被硬件丢弃。
33.2.5. ⑤生成PWM¶
两个 16 位寄存器, LPTIMx_ARR(自动重载寄存器)和 LPTIMx_CMP(比较寄存器)用于在 LPTIM 输出上生成多个不同的波形。
定时器可生成以下波形:
PWM 模式:若 LPTIMx_CMP 寄存器与 LPTIMx_CNT 寄存器匹配,则会立即将 LPTIM输出置 1。若 LPTIMx_ARR 寄存器与 LPTIMx_CNT 寄存器匹配,则会立即将 LPTIM输出复位。
单脉冲模式:对于第一个脉冲,输出波形与 PWM 模式输出波形类似,随后输出将永久复位。
置 1 一次模式:除输出保持最后一个信号电平外(取决于配置的输出极性),输出波形与单脉冲模式输出波形类似。
上述模式要求 LPTIMx_ARR 寄存器的值严格大于 LPTIMx_CMP 寄存器的值。
LPTIM 输出波形可通过 WAVE 位配置,具体如下:
若将 WAVE 位复位为 0,则会强制 LPTIM 生成 PWM 波形或单脉冲波形,具体取决于将哪个位( CNTSTRT 或 SNGSTRT)置 1。
若将 WAVE 位置 1,则会强制 LPTIM 生成置 1 一次波形。
WAVPOL 位控制 LPTIM 输出极性。更改立即生效,因此输出默认值将在极性重新配置后立即更改,甚至会在定时器使能前进行更改。
生成的信号的频率高达 LPTIM 时钟频率 2 分频。 给出了可能在 LPTIM 输出上生成的三种波形。此外,此图还显示了通过 WAVPOL 位更改极性所产生的效果。
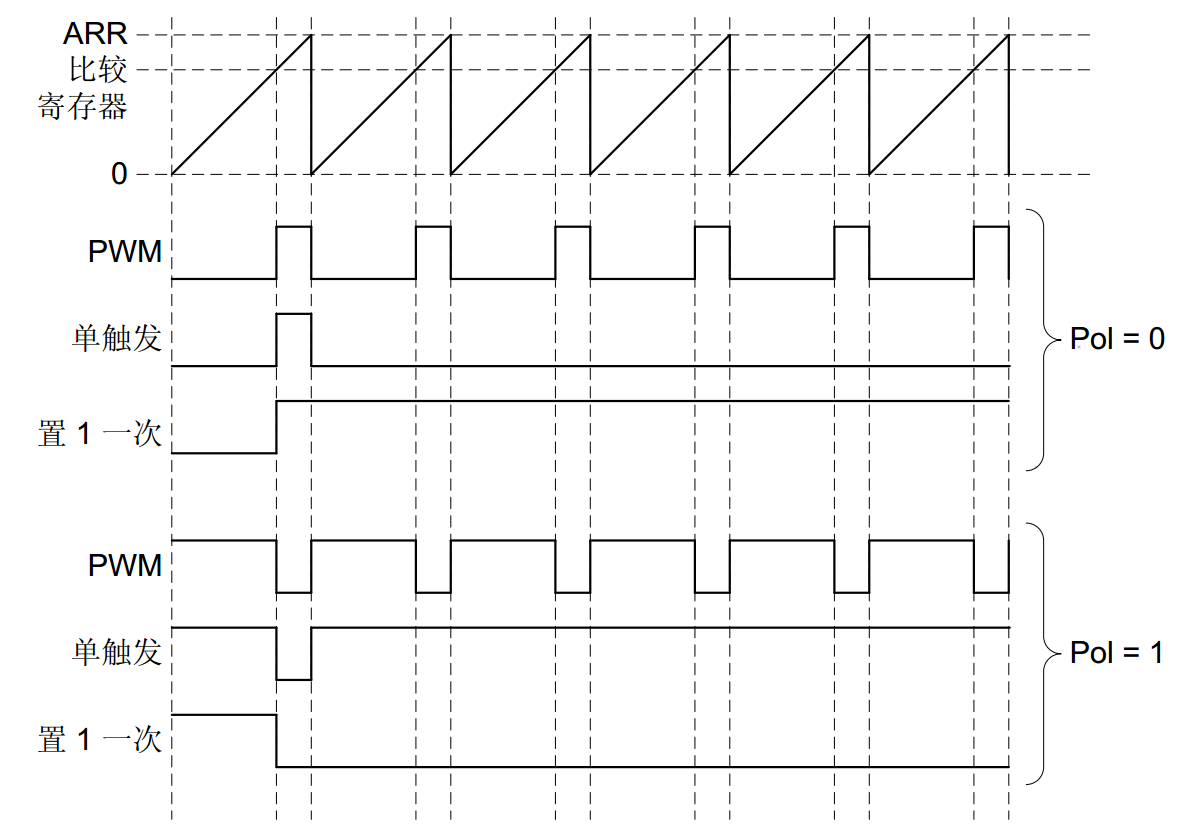
生成PWM时序图
33.2.6. ⑥计数器模式¶
LPTIM 计数器可用于对 LPTIM Input1 上的外部事件进行计数,也可用于对内部时钟周期进行计数。 CKSEL 位和 COUNTMODE 位用于控制将使用哪些源更新计数器。
若使用 LPTIM 对 Input1 上的外部事件进行计数,计数器可在上升沿、下降沿或两种边沿进行更新,具体取决于写入 CKPOL[1:0] 位的值。
根据 CKSEL 和 COUNTMODE 值,可选择以下计数模式
CKSEL = 0: LPTIM 由内部时钟源提供时钟
COUNTMODE = 0
COUNTMODE = 1
COUNTMODE 值不相关。
由于注入到 LPTIM 外部 Input1 的信号也可用于 LPTIM 的时钟,计数器递增计数前存在
一些初始延时(使能 PTIM 后)。更确切地说, LPTIM 外部 Input1 的前五个有效边沿将丢失(使能PTIM后)。
33.2.7. ⑦编码器模式¶
此模式用于处理来自正交编码器的信号,此正交编码器用于检测旋转元件的角度位置。编码器接口模式就相当于带有方向选择的外部时钟。这意味着,计数器仅在 0 到 LPTIMx_ARR寄存器中编程的自动重载值之间进行连续计数(根据具体方向,从 0 递增计数到 ARR,或从 ARR 递减计数到 0)。因此,在启动前必须先配置 LPTIMx_ARR。通过两个外部输入信号 Input1 和 Input2 生成时钟信号作为 LPTIM 计数器时钟。这两个信号间的相位确定计数方向。
仅当 LPTIM 由内部时钟源提供时钟时才可使用编码器模式。 Input1 和 Input2 输入上的信号频率不得超过 LPTIM 内部时钟频率 4 分频。必须满足此条件才能确保 LPTIM 正常工作。
方向变化由 LPTIMx_ISR 寄存器中的两个递减和递增标志指示。此外,如果通过 LPTIMx_IER寄存器使能,还可为两种方向变化事件产生中断。
要激活编码器模式,必须将 ENC 位置 1。 LPTIM 必须首先配置为连续模式。
当编码器模式激活时, LPTIM 计数器按照增量编码器的速度和方向自动修改。因此,其内容始终代表编码器的位置。计数方向由递增和递减标志指示,对应于所连传感器的旋转方向。根据使用 CKPOL[1:0] 位配置的边沿敏感性,可得几种不同的计数方案。下表汇总了可能的组合(假设 Input1 和 Input2 不同时切换)。
表 33‑2预分频器的分频比
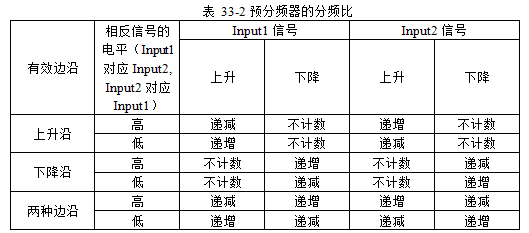
下图所示为编码器模式下配置了两种边沿敏感性的计数序列。特别注意在此模式下, LPTIM 必须由内部时钟源提供时钟,因此 CKSEL 位必须保持其复位值 0。另外,预分频器分频比必须等于其复位值 1( PRESC[2:0] 位必须为“ 000”)。
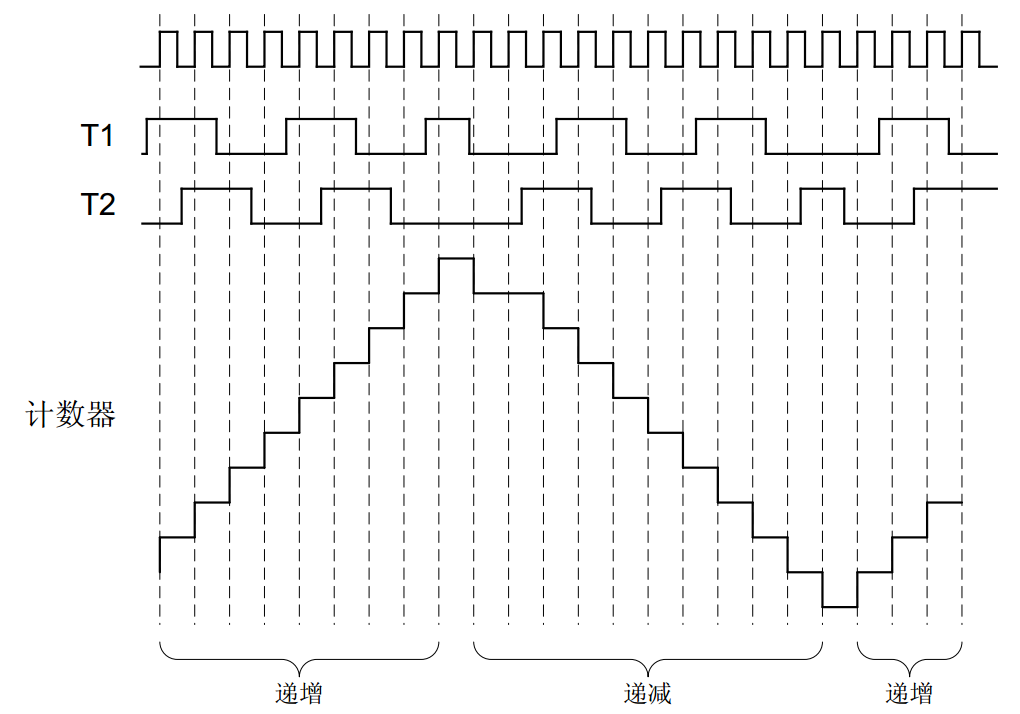
编码器模式计数序列
33.3. 定时器初始化结构体详解¶
HAL库函数对定时器外设建立了多个初始化结构体,分别为时基初始化结构体TIM_Base_InitTypeDef、输出比较初始化结构体TIM_OC_InitTypeDef、输入捕获初始化结构体TIM_IC_InitTypeDef、单脉冲初始化结构体TIM_OnePulse_InitTypeDef、编码器模式配置初始化结构体TIM_Encoder_InitTypeDef、断路和死区初始化结构体TIM_BreakDeadTimeConfigTypeDef,高级控制定时器可以用到所有初始化结构体,通用定时器不能使用TIM_BreakDeadTimeConfigTypeDef结构体,基本定时器只能使用时基结构体。初始化结构体成员用于设置定时器工作环境参数,并由定时器相应初始化配置函数调用,最终这些参数将会写入到定时器相应的寄存器中。
初始化结构体和初始化库函数配合使用是HAL库精髓所在,理解了初始化结构体每个成员意义基本上就可以对该外设运用自如。初始化结构体定义在stm32f7xx_hal_tim.h和stm32f7xx_hal_tim_ex.h文件中,初始化库函数定义在stm32f7xx_hal_tim.c和stm32f7xx_hal_tim_ex.c文件中,编程时我们可以结合这四个文件内注释使用。
33.3.1. LPTIM_HandleTypeDef¶
时基结构体LPTIM_HandleTypeDef用于定时器基础参数设置,与HAL_LPTIM_Init函数配合使用完成配置。
代码清单 低功耗定时器基本初始化结构体
typedef struct {
LPTIM_TypeDef *Instance; //句柄,寄存器基地址
LPTIM_InitTypeDef Init; // LPTIM初始化结构体
HAL_StatusTypeDef Status; // HAL状态
HAL_LockTypeDef Lock; // LPTIM锁定对象
__IO HAL_LPTIM_StateTypeDef State; // LPTIM 外设状态
} LPTIM_HandleTypeDef;
*Instance:定义低功耗定时器外设的基地址,所有寄存器的操作都基于这个基地址操作。
Init:低功耗定时器初始化结构体,用于初始化定时器的参数。
Status:HAL库初始化状态。
Lock:LPTIM锁定对象,开始初始化的时候上锁,结束初始化的时候解锁,避免初始化被打断。
State:LPTIM 外设初始化状态。
33.3.2. LPTIM_InitTypeDef¶
低功耗定时器初始化结构体LPTIM_InitTypeDef用于定时器基础参数设置,与HAL_LPTIM_Init函数配合使用完成配置。
代码清单 定时器基本初始化结构体
typedef struct {
LPTIM_ClockConfigTypeDef Clock; /*配置时钟参数*/
LPTIM_ULPClockConfigTypeDef UltraLowPowerClock; /*配置超低功耗时钟参数 */
LPTIM_TriggerConfigTypeDef Trigger; /*配置定时器触发参数 */
uint32_t OutputPolarity; /*配置输出极性 */
uint32_t UpdateMode; /*配置定时器更新模式*/
uint32_t CounterSource; /*配置计数器基于内部或者外部事件触发递增*/
} LPTIM_InitTypeDef;
Clock:定时器时钟参数的设置,通过clock结构体配置时钟输入源及分频系数。
UltraLowPowerClock:定时器超低功耗时钟参数的设置, 选择超低功耗时钟源之后改组设置才生效。可设置时钟极性和时钟的采样时间。
Trigger:配置定时器触发参数,配置触发源、触发有效边沿、触发采样时间。
OutputPolarity:配置输出极性。
UpdateMode:配置定时器的更新模式。
CounterSource:配置计数器基于内部或者外部事件触发递增。
33.4. PWM输出实验¶
这里我们以PWM输出为例讲解,介绍MCU在低功耗的情况下输出PWM,并通过示波器来观察波形。实验中配置LPTIM输出PWM然后进入停机模式,这个时候一直会有波形产生,直到按键唤醒退出低功耗模式,然后软件控制停止输出波形。
33.4.1. 硬件设计¶
根据开发板引脚使用情况,并且参考规格书中引脚信息 ,使用PD13(LPTIM1_OUT)作为本实验的波形输出通道。将示波器的第一个输入通道与PD13引脚短接,用于观察波形,还有注意共地。
为增加低功耗唤醒功能,需要用到按键KEY2。程序我们设置该引脚为下降沿有效,按下按键会产生一个下降沿,程序响应中断,MCU退出低功耗模式恢复正常模式。
33.4.2. 软件设计¶
这里只讲解核心的部分代码,有些变量的设置,头文件的包含等并没有涉及到,完整的代码请参考本章配套的工程。我们创建了两个文件:bsp_lptim.c和bsp_lptim.h文件用来存定时器驱动程序及相关宏定义。
33.4.2.1. 编程要点¶
定时器 IO 配置
定时器时基结构体LPTIM_HandleTypeDef配置
定时器输出比较结构体LPTIM_InitTypeDef配置
定时器周期占空比配置
33.4.2.2. 软件分析¶
33.4.2.2.1. 宏定义¶
代码清单 宏定义
//引脚定义
/*******************************************************/
#define LPTIM1_OUT_PIN GPIO_PIN_13
#define LPTIM1_OUT_GPIO_PORT GPIOD
#define LPTIM1_OUT_GPIO_CLK_ENABLE() __GPIOD_CLK_ENABLE()
#define LPTIM1_OUT_AF GPIO_AF3_LPTIM1
使用宏定义非常方便程序升级、移植。如果使用不同的定时器IO,修改这些宏即可。
33.4.2.2.2. 定时器复用功能引脚初始化¶
代码清单 定时器复用功能引脚初始化
static void LPTIM_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启定时器相关的GPIO外设时钟*/
LPTIM1_OUT_GPIO_CLK_ENABLE();
/* 定时器功能引脚初始化 */
GPIO_InitStructure.Pin = LPTIM1_OUT_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_AF_PP;
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Speed = GPIO_SPEED_LOW;
GPIO_InitStructure.Alternate = LPTIM1_OUT_AF;
HAL_GPIO_Init(LPTIM1_OUT_GPIO_PORT, &GPIO_InitStructure);
}
定时器通道引脚使用之前必须设定相关参数,这选择复用功能,并指定到对应的定时器。使用GPIO之前都必须开启相应端口时钟。
33.4.2.2.3. 定时器模式配置¶
代码清单 定时器模式配置
static void LPTIM_Mode_Config(void)
{
RCC_PeriphCLKInitTypeDef RCC_PeriphCLKInitStruct;
uint32_t PeriodValue;
uint32_t PulseValue;
/* 选择LSE时钟作为LPTIM时钟源 */
RCC_PeriphCLKInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM1;
RCC_PeriphCLKInitStruct.Lptim1ClockSelection = RCC_LPTIM1CLKSOURCE_LSE;
HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphCLKInitStruct);
// 开启LPTIM1时钟
__LPTIM1_CLK_ENABLE();
/* 定义定时器的句柄即确定定时器寄存器的基地址*/
LPTIM_Handle.Instance = LPTIM1;
// 高级控制定时器时钟源LPTIM_CLK = LSE=32.768KHz
LPTIM_Handle.Init.Clock.Source = LPTIM_CLOCKSOURCE_APBCLOCK_LPOSC;
// 定时器时钟分频系数
LPTIM_Handle.Init.Clock.Prescaler = LPTIM_PRESCALER_DIV1;
// 定时器计数源,内部
LPTIM_Handle.Init.CounterSource = LPTIM_COUNTERSOURCE_INTERNAL;
// 触发源,软件触发
LPTIM_Handle.Init.Trigger.Source = LPTIM_TRIGSOURCE_SOFTWARE;
// 定时器输出极性
LPTIM_Handle.Init.OutputPolarity = LPTIM_OUTPUTPOLARITY_HIGH;
// 定时器更新方式
LPTIM_Handle.Init.UpdateMode = LPTIM_UPDATE_IMMEDIATE;
// 初始化定时器LPTIM
HAL_LPTIM_Init(&LPTIM_Handle);
/*PWM模式配置*/
/*当定时器从0计数到99,即为100次,为一个定时周期PWM周期,32.768KHz/100 = 327.68Hz*/
PeriodValue = 100-1;
/*PWM脉冲为周期一半即50% */
PulseValue = 50-1;
HAL_LPTIM_PWM_Start(&LPTIM_Handle, PeriodValue, PulseValue);
}
首先定义低功耗定时器初始化结构体,定时器模式配置函数主要就是对这两个个结构体的成员进行初始化,然后通过相应的初始化函数把这些参数写入定时器的寄存器中。有关结构体的成员介绍请参考低功耗定时器初始化结构体详解小节。
不同的定时器可能对应不同的时钟源,在使能定时器时钟是必须特别注意。低功耗定时器我们选择LSE作为时钟源,即32.768KHz。
输出PWM我们只需确定两个参数,PeriodValue为波形周期,这里设置为100,周期为32.768KHz/100=327.68Hz,PulseValue为周期的一半,即占空比为50%,最后使用库函数HAL_LPTIM_PWM_Start直接产生波形。
33.4.2.2.4. 低功耗模式输出波形,按键唤醒退出¶
代码清单 LPTIM_PWM_OUT函数
void LPTIM_PWM_OUT(void)
{
LPTIM_GPIO_Config();
LPTIM_Mode_Config();
/* 进入低功耗模式 */
HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI);
/* 等待系统被按键KEY2唤醒,退出低功耗模式后停止输出PWM */
HAL_LPTIM_PWM_Stop(&LPTIM_Handle);
}
首先,初始化定时器的输出引脚,然后配置定时器输出PWM,接着进入低功耗模式,此时示波器可以观察到波形持续输出PWM,直到按键2下才退出低功耗模式,程序控制停止输出PWM。由于程序会进入低功耗模式,此时再烧录其他程序会提示MCU还没上电启动,这个时候只需要按下按键2即可启动并可以正常烧录。
33.4.2.2.5. 主函数¶
代码清单 main函数
int main(void)
{
/* 初始化系统时钟为216MHz */
SystemClock_Config();
/* 初始化低速时钟为32.768KHz */
LSE_ClockEnable();
/* 初始化按键GPIO */
Key_GPIO_Config();
/* 低功耗定时器在低功耗模式输出PWM */
LPTIM_PWM_OUT();
}
首先,调用初始化系统时钟和低速时钟,Key_GPIO_Config函数完成按键引脚初始化配置,该函数定义在bsp_key.c文件中,其中KEY2配置为上升沿中断模式。
接下来,调用LPTIM_PWM_OUT函数完成定时器参数配置,包括定时器复用引脚配置和定时器模式配置,该函数定义在bsp_advance_tim.c文件中它实际上只是简单的调用TIMx_GPIO_Config函数和TIM_Mode_Config函数。接着调用HAL_PWR_EnterSTOPMode函数进入低功耗模式,此时会一直输出PWM,知道按键KEY2产生中断才退出低功耗模式,并使用HAL_LPTIM_PWM_Stop函数停止输出PWM。
33.4.2.3. 下载验证¶
根据实验的硬件设计内容接好示波器输入通道和开发板引脚连接。编译实验程序并下载到开发板上, 调整示波器到合适参数,在示波器显示屏看到一路PWM波形,参考 低功耗定时输出PWM。 如果按下开发板上KEY2则会退出低功耗模式,PWM波形也会停止输出。
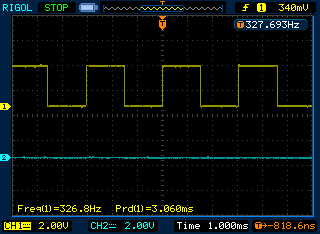
低功耗定时输出PWM