44. RS-485通讯实验¶
本章参考资料:《STM32F4xx中文参考手册》USART章节。
学习本章时,配合本书前面的《USART—串口通讯》及《CAN—通讯实验》章节进行对比学习,效果更佳。
关于实验板中使用的MAX485收发器资料可查阅《MAX485》规格书了解。
44.1. RS-485通讯协议简介¶
与CAN类似,RS-485是一种工业控制环境中常用的通讯协议,它具有抗干扰能力强、传输距离远的特点。RS-485通讯协议由RS-232协议改进而来, 协议层不变,只是改进了物理层,因而保留了串口通讯协议应用简单的特点。
44.2. RS-485的物理层¶
从《CAN—通讯实验》章节中了解到,差分信号线具有很强的干扰能力,特别适合应用于电磁环境复杂的工业控制环境中, RS-485协议主要是把RS-232的信号改进成差分信号,从而大大提高了抗干扰特性, 它的通讯网络示意图见图 RS-485通讯网络示意图。
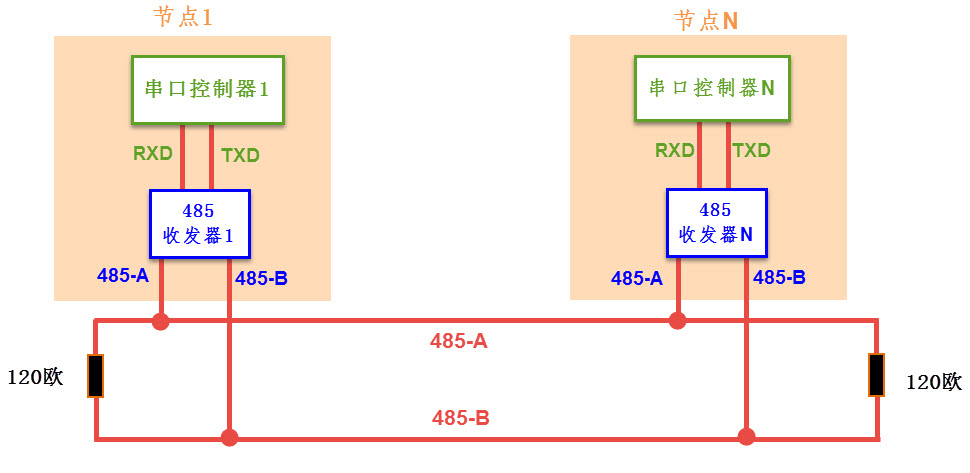
对比CAN通讯网络,可发现它们的网络结构组成是类似的,每个节点都是由一个通讯控制器和一个收发器组成,在RS-485通讯网络中, 节点中的串口控制器使用RX与TX信号线连接到收发器上,而收发器通过差分线连接到网络总线,串口控制器与收发器之间一般使用TTL信号传输, 收发器与总线则使用差分信号来传输。发送数据时,串口控制器的TX信号经过收发器转换成差分信号传输到总线上,而接收数据时, 收发器把总线上的差分信号转化成TTL信号通过RX引脚传输到串口控制器中。
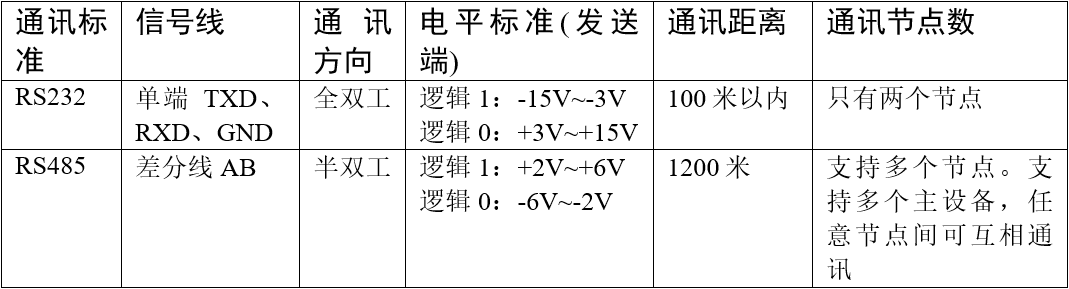
RS-485通讯网络的最大传输距离可达1200米,总线上可挂载128个通讯节点,而由于RS-485网络只有一对差分信号线,它使用差分信号来表达逻辑, 当AB两线间的电压差为-6V~-2V时表示逻辑1,当电压差为+2V~+6V表示逻辑0,在同一时刻只能表达一个信号,所以它的通讯是半双工形式的, 它与RS-232通讯协议的特性对比见图 标准对比。
RS-485与RS-232的差异只体现在物理层上,它们的协议层是相同的,也是使用串口数据包的形式传输数据。而由于RS-485具有强大的组网功能, 人们在基础协议之上还制定了MODBUS协议,被广泛应用在工业控制网络中。此处说的基础协议是指前面串口章节中讲解的, 仅封装了基本数据包格式的协议(基于数据位),而MODBUS协议是使用基本数据包组合成通讯帧格式的高层应用协议(基于数据包或字节)。 感兴趣的读者可查找MODBUS协议的相关资料了解。
由于RS-485与RS-232的协议层没有区别,进行通讯时,我们同样是使用STM32的USART外设作为通讯节点中的串口控制器, 再外接一个RS-485收发器芯片把USART外设的TTL电平信号转化成RS-485的差分信号即可。
44.3. RS-485—双机通讯实验¶
本小节演示如何使用STM32的USART控制器与MAX485收发器,在两个设备之间使用RS-485协议进行通讯,本实验中使用了两个实验板, 无法像CAN实验那样使用回环测试(把STM32 USART外设的TXD引脚使用杜邦线连接到RXD引脚可进行自收发测试, 不过这样的通讯不经过RS-485收发器,跟普通TTL串口实验没有区别),本教程主要以“USART—485通讯”工程进行讲解。
44.3.1. 硬件设计¶
V1
V2
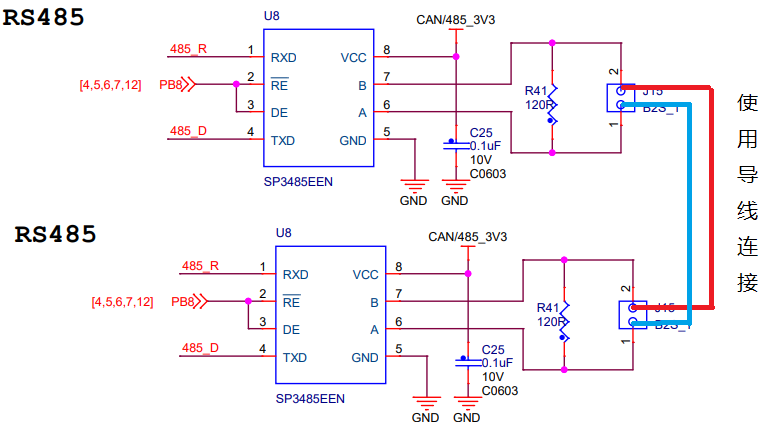
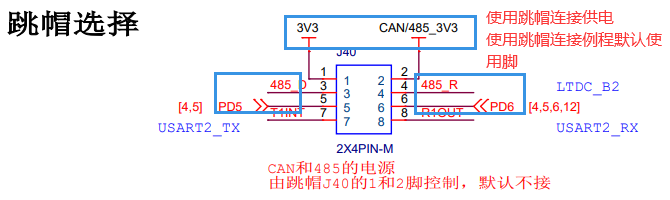
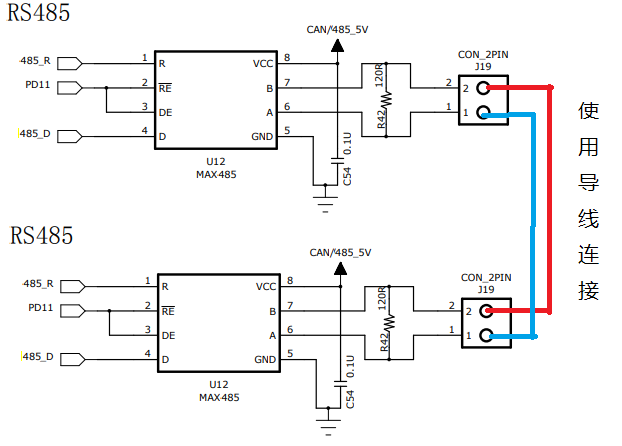
图 双485通讯实验硬件连接图_ 中的是两个实验板的硬件连接。 在单个实验板中,作为串口控制器的STM32从USART外设引出TX和RX两个引脚与RS-485收发器MAX485相连, 收发器使用它的A和B引脚连接到RS-485总线网络中。为了方便使用,我们每个实验板引出的A和B之间都连接了1个120欧的电阻作为RS-485总线的端电阻, 所以要注意如果您要把实验板作为一个普通节点连接到现有的RS-485总线时,是不应添加该电阻的!
由于485只能以半双工的形式工作,所以需要切换状态,MAX485芯片中有“RE”和“DE”两个引脚,用于控制485芯片的收发工作状态的,当RE引脚为低电平时,485芯片处于接收状态,当DE引脚为高电平时芯片处于发送状态。实验板中使用了STM32的PB8直接连接到这两个引脚上,所以通过控制PB8的输出 电平即可控制485的收发状态。
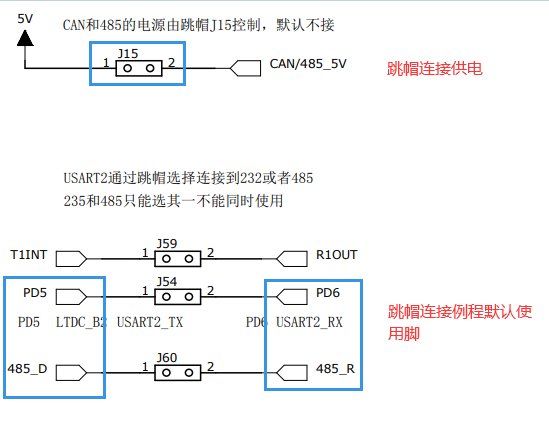
要注意的是,由于我们的实验板485使用的信号线与液晶屏共用了,为防止干扰,平时我们默认是不给485收发器供电的,使用485的时候一定要把485接线端子旁边的“3V3”排针使用跳线帽与“CAN/485_3V3”排针连接起来进行供电,并且把液晶屏从板子上拔下来;而又由于实验板的RS-232与RS-485通讯实验都使用STM32的同一个USART外设及收发引脚,实验时注意必须要把STM32的“PD5引脚”与MAX485的“485_RX”及“PD6”与“485_TX”使用跳线帽连接起来(这些信号都在485接线端子旁边的排针上)。
要实现通讯,我们还要使用导线把实验板引出的A和B两条总线连接起来,才能构成完整的网络。实验板之间A与A连接,B与B连接即可。
44.3.2. 软件设计¶
为了使工程更加有条理,我们把RS485控制相关的代码独立分开存储,方便以后移植。在“串口实验”之上新建“bsp_485.c”及“bsp_485.h”文件, 这些文件也可根据您的喜好命名,它们不属于STM32标准库的内容,是由我们自己根据应用需要编写的。这个实验的底层STM32驱动与串口控制区别不大, 上层实验功能上与CAN实验类似。
44.3.2.2. 代码分析¶
485硬件相关宏定义
我们把485硬件相关的配置都以宏的形式定义到 “bsp_485.h”文件中, 见 代码清单:485-1。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | /*USART号、时钟、波特率*/
#define RS485_USART USART2
#define RS485_USART_CLK RCC_APB1Periph_USART2
#define RS485_USART_BAUDRATE 115200
/*RX引脚*/
#define RS485_USART_RX_GPIO_PORT GPIOD
#define RS485_USART_RX_GPIO_CLK RCC_AHB1Periph_GPIOD
#define RS485_USART_RX_PIN GPIO_Pin_6
#define RS485_USART_RX_AF GPIO_AF_USART2
#define RS485_USART_RX_SOURCE GPIO_PinSource6
/*TX引脚*/
#define RS485_USART_TX_GPIO_PORT GPIOD
#define RS485_USART_TX_GPIO_CLK RCC_AHB1Periph_GPIOD
#define RS485_USART_TX_PIN GPIO_Pin_5
#define RS485_USART_TX_AF GPIO_AF_USART2
#define RS485_USART_TX_SOURCE GPIO_PinSource5
/*485收发控制引脚*/
#define RS485_RE_GPIO_PORT GPIOD
#define RS485_RE_GPIO_CLK RCC_AHB1Periph_GPIOD
#define RS485_RE_PIN GPIO_Pin_11
/*中断相关*/
#define RS485_INT_IRQ USART2_IRQn
#define RS485_IRQHandler USART2_IRQHandler
|
以上代码根据硬件连接,把与485通讯使用的USART外设号 、引脚号、引脚源以及复用功能映射都以宏封装起来, 并且定义了接收中断的中断向量和中断服务函数,我们通过中断来获知接收数据。(注意挑战者V2 底板 485收发控制引脚RE为PB8)
初始化485的USART配置
利用上面的宏,编写485的USART初始化函数,见 代码清单:485-2。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 | /*
* 函数名:RS485_Config
* 描述 :USART GPIO 配置,工作模式配置
* 输入 :无
* 输出 : 无
* 调用 :外部调用
*/
void RS485_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 配置 USART时钟 */
RCC_AHB1PeriphClockCmd(RS485_USART_RX_GPIO_CLK|
RS485_USART_TX_GPIO_CLK|
RS485_RE_GPIO_CLK, ENABLE);
RCC_APB1PeriphClockCmd(RS485_USART_CLK, ENABLE);
/* TX 引脚源*/
GPIO_PinAFConfig(RS485_USART_RX_GPIO_PORT,RS485_USART_RX_SOURCE, RS485_USART_RX_AF);
/* RX 引脚源*/
GPIO_PinAFConfig(RS485_USART_TX_GPIO_PORT,RS485_USART_TX_SOURCE,RS485_USART_TX_AF);
/* USART GPIO配置 */
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*TX*/
GPIO_InitStructure.GPIO_Pin = RS485_USART_TX_PIN;
GPIO_Init(RS485_USART_TX_GPIO_PORT, &GPIO_InitStructure);
/*RX */
GPIO_InitStructure.GPIO_Pin = RS485_USART_RX_PIN;
GPIO_Init(RS485_USART_RX_GPIO_PORT, &GPIO_InitStructure);
/* 485收发控制管脚 */
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Pin = RS485_RE_PIN ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(RS485_RE_GPIO_PORT, &GPIO_InitStructure);
/* USART 模式配置*/
USART_InitStructure.USART_BaudRate = RS485_USART_BAUDRATE;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(RS485_USART, &USART_InitStructure);
/*使能USART*/
USART_Cmd(RS485_USART, ENABLE);
/*配置中断优先级*/
NVIC_Configuration();
/* 使能串口接收中断 */
USART_ITConfig(RS485_USART, USART_IT_RXNE, ENABLE);
/*控制485芯片进入接收模式*/
GPIO_ResetBits(RS485_RE_GPIO_PORT,RS485_RE_PIN);
}
|
与所有使用到GPIO的外设一样,都要先把使用到的GPIO引脚模式初始化,配置好复用功能,其中用于控制MAX485芯片的收发状态的引脚被初始化成推挽输出模式, 以便手动控制它的电平输出,切换状态。485使用到的USART也需要配置好波特率、有效字长、停止位及校验位等基本参数,在通讯中, 两个485节点的串口参数应一致,否则会导致通讯解包错误。在实验中还使能了串口的接收中断功能,当检测到新的数据时,进入中断服务函数中获取数据。
使用中断接收数据
接下来我们编写在USART中断服务函数中接收数据的相关过程,见 代码清单:485-3 , 其中的bsp_RS485_IRQHandler函数直接被bsp_stm32f4xx_it.c文件的USART中断服务函数调用,不在此列出。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 | //中断缓存串口数据
#define UART_BUFF_SIZE 1024
volatile uint16_t uart_p = 0;
uint8_t uart_buff[UART_BUFF_SIZE];
void bsp_RS485_IRQHandler(void)
{
if (uart_p<UART_BUFF_SIZE) {
if (USART_GetITStatus(RS485_USART, USART_IT_RXNE) != RESET) {
uart_buff[uart_p] = USART_ReceiveData(RS485_USART);
uart_p++;
USART_ClearITPendingBit(RS485_USART, USART_IT_RXNE);
}
} else {
USART_ClearITPendingBit(RS485_USART, USART_IT_RXNE);
}
}
//获取接收到的数据和长度
char *get_rebuff(uint16_t *len)
{
*len = uart_p;
return (char *)&uart_buff;
}
//清空缓冲区
void clean_rebuff(void)
{
uint16_t i=UART_BUFF_SIZE+1;
uart_p = 0;
while (i)
uart_buff[--i]=0;
}
|
这个数据接收过程主要思路是使用了接收缓冲区,当USART有新的数据引起中断时,调用库函数USART_ReceiveData把新数据读取到缓冲区数组uart_buff中, 其中get_rebuff函数可以用于获缓冲区中有效数据的长度,而clean_rebuff函数可以用于对缓冲区整体清0,这些函数配合使用, 实现了简单的串口接收缓冲机制。这部分串口数据接收的过程跟485收发器无关,是串口协议通用的。
切换收发状态
在前面我们了解到RS-485是半双工通讯协议,发送数据和接收数据需要分时进行,所以需要经常切换收发状态。 而MAX485收发器根据其“RE”和“DE”引脚的外部电平信号切换收发状态,所以控制与其相连的STM32普通IO电平即可控制收尾,为简便起见, 我们把收发状态切换定义成了宏,见 代码清单:485-4。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | // 简单的延时
static void RS485_delay(__IO u32 nCount)
{
for (; nCount != 0; nCount--);
}
/*控制收发引脚*/
//进入接收模式,必须要有延时等待485处理完数据
#define RS485_RX_EN() RS485_delay(1000);\
GPIO_ResetBits(RS485_RE_GPIO_PORT,RS485_RE_PIN); \
RS485_delay(1000);
//进入发送模式,必须要有延时等待485处理完数据
#define RS485_TX_EN() RS485_delay(1000); \
GPIO_SetBits(RS485_RE_GPIO_PORT,RS485_RE_PIN);\
RS485_delay(1000);
|
这两个宏中,主要是在控制电平输出前后加了一小段时间延时,这是为了给MAX485芯片预留响应时间,因为STM32的引脚状态电平变换后, MAX485芯片可能存在响应延时。例如,当STM32控制自己的引脚电平输出高电平(控制成发送状态),然后立即通过TX信号线发送数据给MAX485芯片, 而MAX485芯片由于状态不能马上切换,会导致丢失了部分STM32传送过来的数据,造成错误。
发送数据
STM32使用485发送数据的过程也与普通的USART发送数据过程差不多,我们定义了一个RS485_SendByte函数来发送一个字节的数据内容, 见 代码清单:485-5。
1 2 3 4 5 6 7 8 9 10 | /***************** 发送一个字符 **********************/
//使用单字节数据发送前要使能发送引脚,发送后要使能接收引脚。
void RS485_SendByte( uint8_t ch )
{
/* 发送一个字节数据到USART1 */
USART_SendData(RS485_USART,ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(RS485_USART, USART_FLAG_TXE) == RESET);
}
|
上述代码中就是直接调用了STM32库函数USART_SendData把要发送的数据写入到USART的数据寄存器,然后检查标志位等待发送完成。
在调用RS485_SendByte 函数前,需要先使用前面提到的切换收发状态宏, 把MAX485切换到发送模式,STM32发出的数据才能正常传输到485网络总线上, 当发送完数据的时候,应重新把MAX485切换回接收模式,以便获取网络总线上的数据。
44.3.2.3. main函数¶
最后我们来阅读main函数,了解整个通讯过程,见 代码清单:485-6。 这个main函数的整体设计思路是,实验板检测自身的按键状态,若按键被按下,则通过485发送256个测试数据到网络总线上,若自身接收到总线上的256个数据, 则把这些数据作为调试信息打印到电脑端。所以,如果把这样的程序分别应用到485总线上的两个通讯节点时,就可以通过按键控制互相发送数据了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 | /**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
char *pbuf;
uint16_t len;
LED_GPIO_Config();
/*初始化USART1*/
Debug_USART_Config();
/*初始化485使用的串口,使用中断模式接收*/
RS485_Config();
LED_BLUE;
Key_GPIO_Config();
printf("\r\n 欢迎使用野火STM32 开发板。\r\n");
printf("\r\n 野火RS-485通讯实验例程\r\n");
printf("\r\n 实验步骤:\r\n");
printf("\r\n 1.使用导线连接好两个485通讯设备\r\n");
printf("\r\n 2.使用跳线帽连接好:3V3<--->CAN/485_3V3,485-RX--PD5,485-TX--PD6 \r\n");
printf("\r\n 3.若使用两个野火开发板进行实验,给两个开发板都下载本程序即可。\r\n");
printf("\r\n 4.准备好后,按下其中一个开发板的KEY1键,会使用485向外发送0-255的数字 \r\n");
printf("\r\n 5.若开发板的485接收到256个字节数据,会把数据以16进制形式打印出来。 \r\n");
while (1) {
/*按一次按键发送一次数据*/
if ( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON) {
uint16_t i;
LED_BLUE;
//切换到发送状态
RS485_TX_EN();
for (i=0; i<=0xff; i++) {
RS485_SendByte(i); //发送数据
}
/*加短暂延时,保证485发送数据完毕*/
Delay(0xFFF);
RS485_RX_EN();//切换回接收状态
LED_GREEN;
printf("\r\n发送数据成功!\r\n"); //使用调试串口打印调试信息到终端
} else {
LED_BLUE;
pbuf = get_rebuff(&len);
if (len>=256) {
LED_GREEN;
printf("\r\n接收到长度为%d的数据\r\n",len);
RS485_DEBUG_ARRAY((uint8_t*)pbuf,len);
clean_rebuff();
}
}
}
}
|
在main函数中,首先初始化了LED、按键以及调试使用的串口,再调用前面分析的RS485_Config函数初始化了RS-485通讯使用的串口工作模式。
初始化后485就进入了接收模式,当接收到数据的时候会进入中断并把数据存储到接收缓冲数组中, 我们在main函数的while循环中(else部分)调用get_rebuff来查看该缓冲区的状态,若接收到256个数据就把这些数据通过调试串口打印到电脑端,然后清空缓冲区。
在while循环中,还检测了按键的状态,若按键被按下,就把MAX485芯片切换到发送状态并调用RS485_SendByte函数发送测试数据0x00-0xFF,发送完毕后切换回接收状态以检测总线的数据。
44.3.3. 下载验证¶
下载验证这个485通讯实验需要您有两个实验板,操作步骤如下:
(1) 按照“硬件设计”小节中的图例连接两个板子的485总线;
(2) 使用跳线帽连接 : 485_TX<—>PD6、485_RX<—>PD5、3V3<—>CAN/485_3V3 ;
(3) 用USB线使实验板“USB TO UART”接口跟电脑连接起来,在电脑端打开串口调试助手, 编译本章配套的程序,并给两个板子都下载该程序,然后复位。
(4) 复位后在串口调试助手应看到485测试的调试信息,按一下其中一个实验板上的KEY1按键, 另一个实验板会接收到报文,在串口调试助手可以看到相应的发送和接收的信息。