31. TIM—基本定时器¶
本章参考资料:《STM32F10X-中文参考手册》 基本定时器章节。学习本章时,配合参考资料一起阅读,效果会更佳,特别是涉及到寄存器说明的部分。
31.1. 定时器分类¶
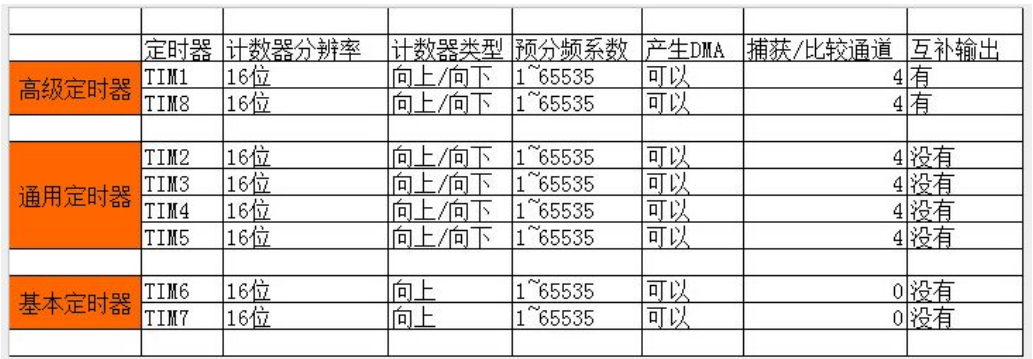
图 30‑1 定时器分类
31.2. 基本定时器功能框图讲解¶
基本定时器的核心是时基,不仅基本定时器有,通用定时器和高级定时器也有。学习定时器时,我们先从简单的基本定时器学起,到了后面 的通用和高级定时器的学习中,我们直接跳过时基部分的讲解即可。基本定时器的功能框图见 图30_2。
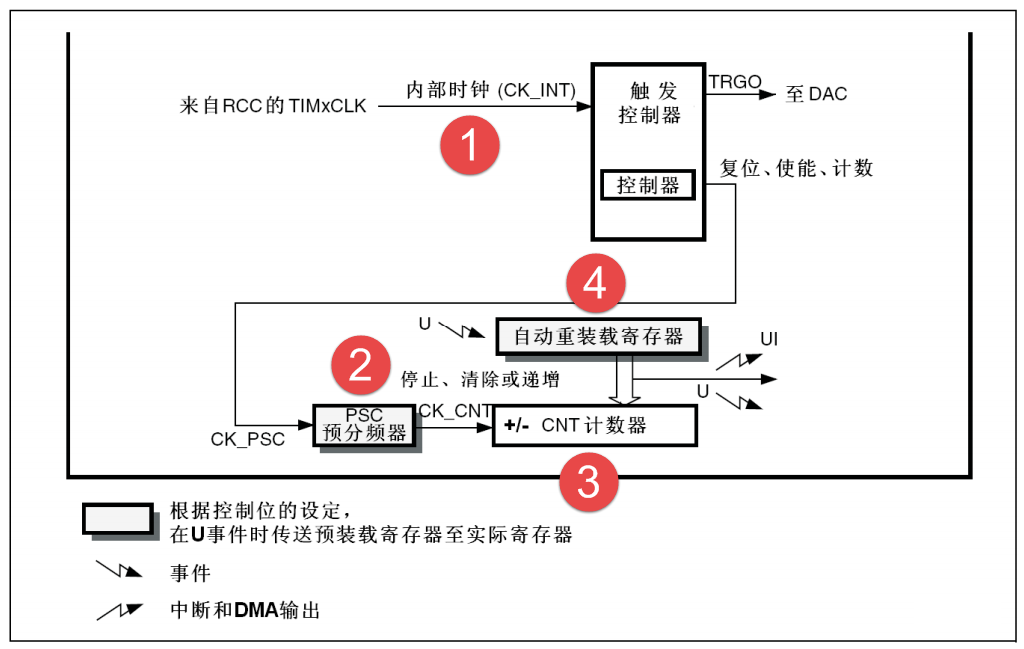
图 30‑2 基本定时器功能框图
31.2.1. ①时钟源¶
31.2.2. ②计数器时钟¶
31.2.3. ③计数器¶
31.2.4. ④自动重装载寄存器¶
31.2.5. 定时时间的计算¶
31.3. 定时器初始化结构体详解¶
在HAL库函数头文件stm32f1xx_hal_tim.h中对定时器外设建立了四个初始化结构体,基本定时器只用到其中一个即TIM_TimeBaseInitTypeDef,具体的见 代码清单30_1 ,其他三个我们在高级定时器章节讲解。
typedef struct {
uint32_t Prescaler; // 预分频器
uint32_t CounterMode; // 计数模式
uint32_t Period; // 定时器周期
uint32_t ClockDivision; // 时钟分频
uint32_t RepetitionCounter; // 重复计算器
} TIM_TimeBaseInitTypeDef;
Prescaler:定时器预分频器设置,时钟源经该预分频器才是定时器时钟,它设定 TIMx_PSC寄存器的值。可设置范围为0至65535,实现1至65536分频。
CounterMode:定时器计数方式,可是在为向上计数、向下计数以及三种中心对齐模 式。基本定时器只能是向上计数,即TIMx_CNT只能从0开始递增,并且无需初始化。
Period:定时器周期,实际就是设定自动重载寄存器的值,在事件生成时更新到影子寄存器。可设置范围为0至65535。
ClockDivision:时钟分频,设置定时器时钟CK_INT频率与数字滤波器采样时钟频率分频比,基本定时器没有此功能,不用设置。
RepetitionCounter:重复计数器,属于高级控制寄存器专用寄存器位,利用它可以非常容易控制输出PWM的个数。这里不用设置。
虽然定时器基本初始化结构体有5个成员,但对于基本定时器只需设置其中两个就可以,想想使用基本定时器就是简单。
31.4. 基本定时器定时实验¶
31.4.1. 硬件设计¶
本实验利用基本定时器 TIM6/7 定时 1s,1s 时间到 LED 翻转一次。基本定时器是单片机内部的资源,没有外部 IO,不需要接外部电路,现只需要一个 LED 即可。
31.4.2. 软件设计¶
这里只讲解核心的部分代码,有些变量的设置,头文件的包含等并没有涉及到,完整的代码请参考本章配套的工程。我们编写两个定时器驱动文件,bsp_TiMbase.h 和 bsp_TiMbase.h,用来配置定时器中断优先级和和初始化定时器。
31.4.2.1. 编程要点¶
开定时器时钟 TIMx_CLK, x[6,7];
初始化时基初始化结构体;
使能 TIMx, x[6,7] update 中断;
打开定时器;
编写中断服务程序
31.4.2.2. 软件分析¶
31.4.2.2.1. 基本定时器宏定义¶
#define BASIC_TIM TIM6
#define BASIC_TIM_CLK_ENABLE() __TIM6_CLK_ENABLE()
#define BASIC_TIM_IRQn TIM6_DAC_IRQn
#define BASIC_TIM_IRQHandler TIM6_DAC_IRQHandler
使用宏定义非常方便程序升级、移植。
31.4.2.2.2. 基本定时器配置¶
void BASIC_TIMx_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig;
htimx.Instance = BASIC_TIMx;
htimx.Init.Prescaler = BASIC_TIMx_PRESCALER;
htimx.Init.CounterMode = TIM_COUNTERMODE_UP;
htimx.Init.Period = BASIC_TIMx_PERIOD;
HAL_TIM_Base_Init(&htimx);
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
HAL_TIMEx_MasterConfigSynchronization(&htimx, &sMasterConfig);
}
31.4.2.2.3. 定时器中断优先级配置¶
// 中断优先级配置
void BASIC_TIM_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
// 设置中断组为0
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
// 设置中断来源
NVIC_InitStructure.NVIC_IRQChannel = BASIC_TIM_IRQ ;
// 设置主优先级为 0
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
// 设置抢占优先级为3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
我们设置中断分组为 0,主优先级为 0,抢占优先级为 3。
31.4.2.2.4. 定时器中断服务程序¶
void BASIC_TIM_IRQHandler (void)
{
if ( TIM_GetITStatus( BASIC_TIM, TIM_IT_Update) != RESET ) {
time++;
TIM_ClearITPendingBit(BASIC_TIM , TIM_FLAG_Update);
}
}
定时器中断一次的时间是 1ms,我们定义一个全局变量 time,每当进一次中断的时候,让time 来记录进入中断的次数。如果我们想实现一个 1s 的定时,我们只需要判断 time 是否等于 1000 即可,1000 个 1ms 就是 1s。然后把 time 清 0,重新计数,以此循环往复。在中断服务程序的最后,要把相应的中断标志位清除掉,切记。
31.4.2.2.5. 主函数¶
void BASIC_TIM_IRQHandler (void)
{
HAL_TIM_IRQHandler(&TIM_TimeBaseStructure);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim==(&TIM_TimeBaseStructure)) {
LED1_TOGGLE; //红灯周期闪烁
}
}
我们在TIM_Mode_Config函数启动了定时器更新中断,在发生中断时,中断服务函数就得到运行。在服务函数内直接调用库函数HAL_TIM_IRQHandler函数,它会产生一个中断回调函数HAL_TIM_PeriodElapsedCallback,用来添加用户代码,确定是TIM6产生中断后才运行RGB彩灯翻转动作。
31.4.3. 下载验证¶
把编写好的程序下载到开发板,可以看到 LED1 以 1s 的频率闪烁一次。