7. 使用寄存器点亮LED灯¶
本章参考资料:《IMXRT1050RM》(参考手册),学习本章时,配合《IMXRT1050RM》 “Chapter 32 General Purpose Input/Output (GPIO)”及“Chapter 34 IOMUX Controller (IOMUXC)”章节一起阅读,效果会更佳,特别是涉及到寄存器说明的部分。关于建立工程时使用KEIL5的基本操作,请参考前面的章节。
7.1. GPIO简介¶
GPIO是通用输入输出端口的简称,简单来说就是RT1052可控制的引脚,RT1052芯片的GPIO引脚与外部设备连接起来,从而实现与外部通讯、控制以及数据采集的功能。RT1052芯片的GPIO被分成很多组,每组有32个引脚,如型号为MIMXRT1052型号的芯片有GPIO1、GPIO2至GPIO5共5组GPIO,芯片一共196个引脚,其中GPIO就占了一大部分,所有的GPIO引脚都有基本的输入输出功能。
最基本的输出功能是由RT1052控制引脚输出高、低电平,实现开关控制,如把GPIO引脚接入到LED灯,那就可以控制LED灯的亮灭,引脚接入到继电器或三极管,那就可以通过继电器或三极管控制外部大功率电路的通断。
最基本的输入功能是检测外部输入电平,如把GPIO引脚连接到按键,通过电平高低区分按键是否被按下。
7.2. GPIO框图剖析¶
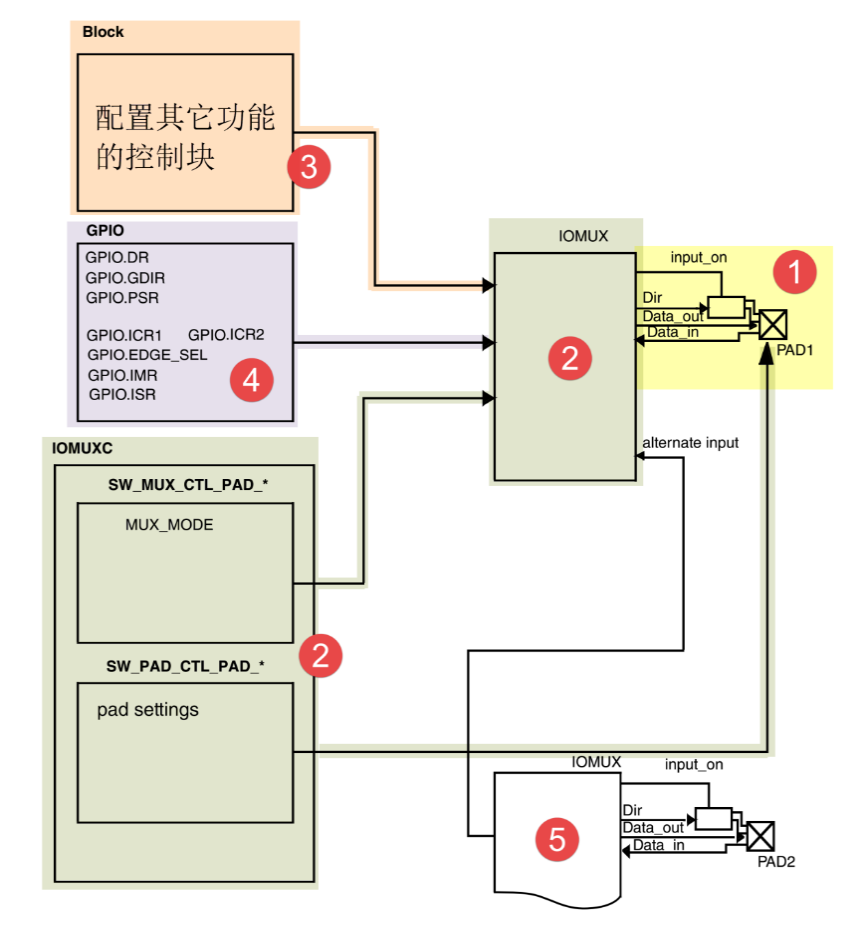
图 7‑1 GPIO结构框图
通过GPIO硬件结构框图,就可以从整体上深入了解GPIO外设及它的各种应用模式。该图从最右端看起,①中的就表示RT1052芯片引出的GPIO引脚,其余部件都位于芯片内部。
7.2.1. 基本结构分析¶
下面我们按图 7‑1中的编号对GPIO端口的结构部件进行说明。
7.2.1.1. PAD¶
PAD代表了一个RT1052的GPIO引脚。在它的左侧是一系列信号通道及控制线,如input_on控制输入开关,Dir控制引脚的输入输出方向,Data_out控制引脚输出高低电平,Data_in作为信号输入,这些信号都经过一个IOMUX的器件连接到左侧的寄存器。
另外,对于每个引脚都有很多关于属性的配置,这些配置是由图 7‑2中的框架结构实现的。
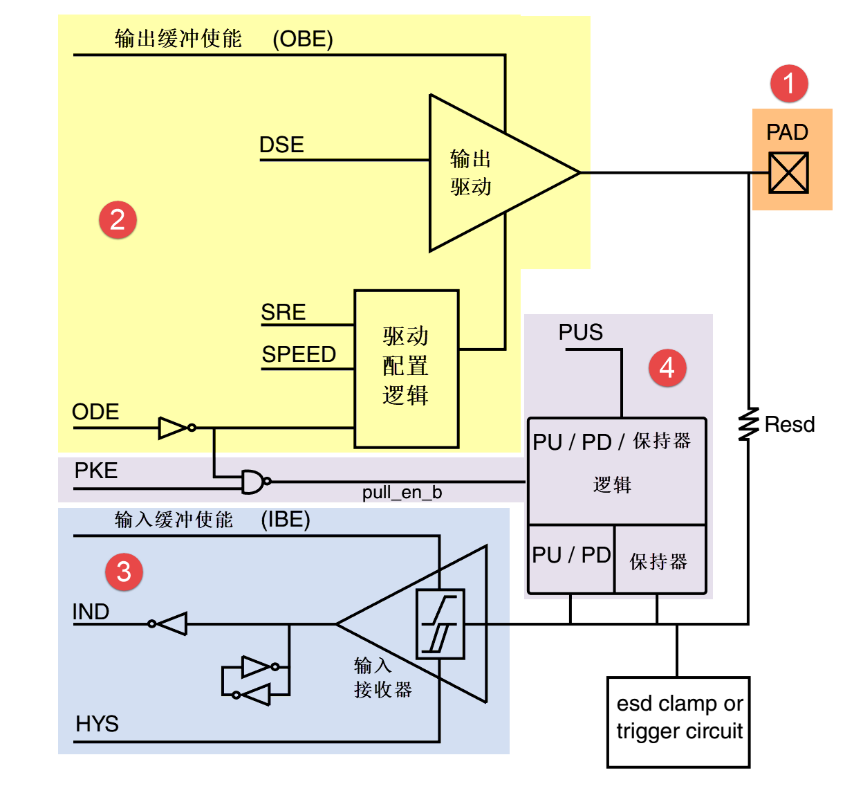
图 7‑2 PAD接口框架
7.2.1.1.1. ①PAD引脚¶
框图中的最右侧的PAD同样是代表一个RT1052的引脚。
7.2.1.1.2. ②输出缓冲区¶
当输出缓冲区使能时,引脚被配置为输出模式。在输出缓冲区中,又包含了如下的属性配置:
DSE驱动能力
DSE可以调整芯片内部与引脚串联电阻R0的大小,从而改变引脚的驱动能力。例如,R0的初始值为260欧姆,在3.3V电压下其电流驱动能力为12.69mA,通过DSE可以把R0的值配置为原值的1/2、1/3…1/7等。
SRE压摆率配置
压摆率是指电压转换速率,可理解为电压由波谷升到波峰的时间。增大压摆率可减少输出电压的上升时间。RT1052的引脚通过SRE支持低速和高速压摆率这两种配置。压摆率是大信号特性,下面的带宽是小信号特性。
SPEED带宽配置
通过SPEED可以设置IO的带宽,分别可设置为50MHz、100MHz以及200MHz。带宽的意思是能通过这个IO口最高的信号频率,通俗点讲就是方波不失真,如果超过这个频率方波就变正弦波。但是这个带宽要区别于IO的翻转速率,IO的翻转速率的信号来自于GPIO这个外设,而IO的带宽只是限制了IO口引脚的物理特性,IO口的信号可以来自于内部定时器输出的PWM信号,也可以来自于GPIO翻转输出的信号,两者相比之下,PWM信号的频率是远远高于GPIO翻转输出的信号频率。况且1052没有高速GPIO,GPIO的翻转率约为10M,1060系列则有高速GPIO,GPIO翻转速率达到了逆天的150M。但要使用1060的快速GPIO,需要改用GPIO编号。
ODE开漏输出配置
通过ODE可以设置引脚是否工作在开漏输出模式。在该模式时引脚可以输出高阻态和低电平,输出高阻态时可由外部上拉电阻拉至高电平。开漏输出模式常用在一些通讯总线中,如I2C。
7.2.1.1.3. ③输入缓冲区¶
当输入缓冲区使能时,引脚被配置为输入模式。在输入缓冲区中,又包含了如下的属性配置
HYS滞后使能
RT1052的输入检测可以使用普通的CMOS检测或施密特触发器模式(滞后模式)。施密特触发器具有滞后效应,对正向和负向变化的输入信号有不同的阈值电压,常被用于电子开关、波形变换等场合,其转换特性和对比见图 7‑3及图 7‑4,如检测按键时,使用施密特模式即可起到消抖的功能。
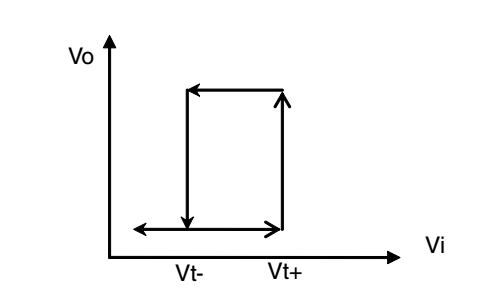
图 7‑3施密特触发器的转换特性
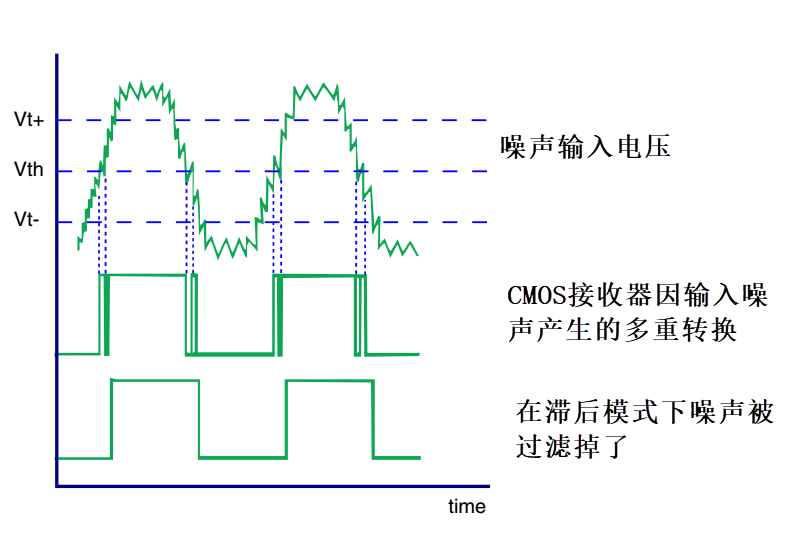
图 7‑4 在CMOS模式和滞后模式下的接收器输出
7.2.1.1.4. ④Pull/Keeper上下拉、保持器¶
引脚的控制逻辑中还包含了上下拉、保持器的功能。芯片内部的上拉和下拉电阻可以将不确定的信号钳位在高、低电平,或小幅提高的电流输出能力,上拉提供输出电流,下拉提供输入电流。注意这些上下拉配置只是弱拉,对于类似I2C之类的总线,还是必须使用外部上拉电阻。RT1052芯片的电源模块中包含转换器,当转换器停止工作时,保持器会保持输入输出电压。
上下拉、保持器可以通过如下属性配置:
PUS上下拉配置
PUS可配置项可选为100K欧下拉以及22K欧、47K欧及100K欧上拉。
PUE上下拉、保持器选择
上下拉功能和保持器功能是二选一的,可以通过PUE来选择。
PKE上下拉、保持器配置
上下拉功能和保持器还通过PKE来控制是否使能。
注意,当引脚被配置为输出模式时,不管上下拉、保持器是什么配置,它们都会被关闭。
7.2.1.2. IOMUX复用选择器¶
继续分析图 7‑1,图中标注的第2部分IOMUX译为IO复用选择器。RT1052的芯片每个GPIO都通过IOMUX支持多种功能,例如一个IO可用于网络外设ENET的数据接收引脚,也可以被配置成PWM外设的输出引脚,这样的设计大大增加了芯片的适用性,这样可选的功能就是由IOMUX实现的。IOMUX相当于增加了多根内部信号线与IO引脚相连,最多有8根,也就是说一个IO最多可支持8种可选的功能。
IOMUX由其左侧的IOMUXC控制(C表示Controler),IOMUXC提供寄存器给用户进行配置,它又分成MUX Mode(IO模式控制)以及Pad Settings(Pad配置)两个部分:
MUX Mode配置
MUX Mode就是用来配置引脚的复用功能,按上面的例子,即是具体是用于网络外设ENET的数据接收,还是用于PWM外设的输出引脚,当然,也可以配置成普通的IO口,仅用于控制输出高低电平。
Pad Settings配置
Pad Settings用于配置引脚的属性,例如驱动能力,是否使用上下拉电阻,是否使用保持器,是否使用开漏模式以及使用施密特模式还是CMOS模式等。关于属性的介绍会在后面给出,在学习各种外设时,也将会接触到这些属性在不同场合下的应用。
在IOMUXC外设中关于MUX Mode和Pad Settings寄存器命名格式见表格 7‑1。
表格 7‑1 IOMUXC寄存器命名的方式
IOMUXC控制类型 |
寄存器名称 |
|---|---|
MUX Mode |
IOMUXC_SW_MUX_CTL_PAD_XXXX |
Pad Settings |
IOMUXC_SW_PAD_CTL_PAD_XXXX |
每个引脚都包含这两个寄存器,表中的XXXX表示引脚的名字,例如本芯片中有一个名为GPIO_AD_B0_09的引脚,编号为GPIO1.9,你可以在参考手册的IOMUXC章节中找到它的这两个寄存器:IOMUXC_SW_MUX_CTL_PAD_ GPIO_AD_B0_09以及IOMUXC_SW_PAD_CTL_PAD_ GPIO_AD_B0_09,以下简称MUX寄存器及PAD寄存器。根据寄存器说明即可对该引脚进行相应的配置。
7.2.1.2.1. IOMUXC_SW_MUX_CTL_PAD_XXXX引脚模式寄存器¶
下面以GPIO_AD_B0_09引脚为例对 MUX寄存器进行说明,该引脚相应的MUX寄存器在参考手册中的描述见图 7‑5。
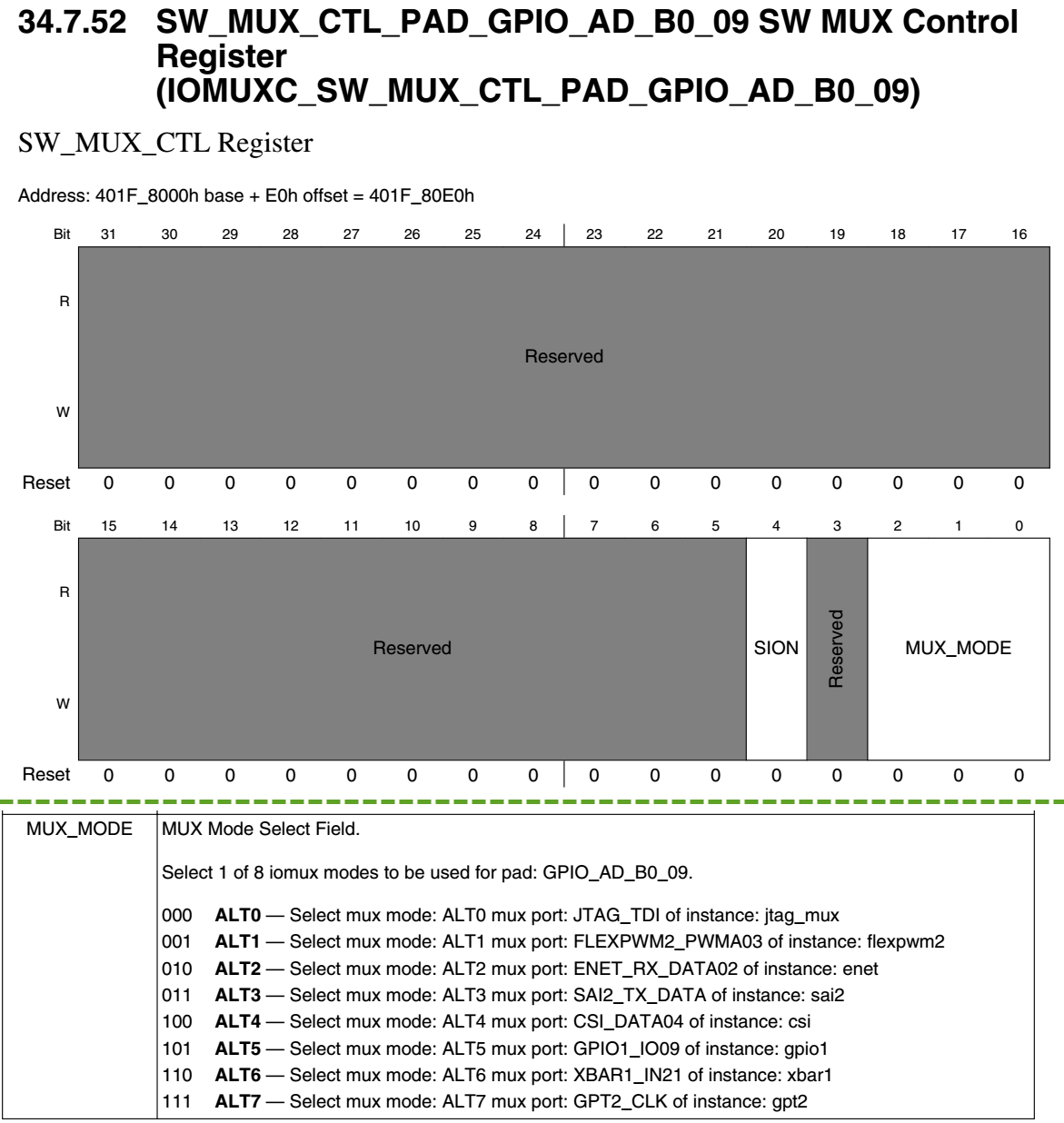
图 7‑5 参考手册中对GPIO1.9引脚MUX配置寄存器的说明
可以看到,该寄存器主要有两个配置域,分别是SION和MUX_MODE,其中SION用于设置引脚在输出模式下同时开启输入通道。重点是MUX_MODE的配置,它使用3个寄存器位表示可选的ALT0~ALT7这8个模式,如ALT2模式就是用于ENET以太网外设的数据接收信号;若配置为ALT4则引脚会连接至CSI摄像头外设,作为数据信号;配置为ALT5时,该引脚则用于最基础的GPIO模式,简单地通过后面介绍的GPIO外设控制输入输出。
7.2.1.2.2. IOMUXC_SW_PAD_CTL_PAD_XXXX引脚属性寄存器¶
类似地,以GPIO_AD_B0_09引脚中PAD寄存器在参考手册中的描述见图 7‑6。
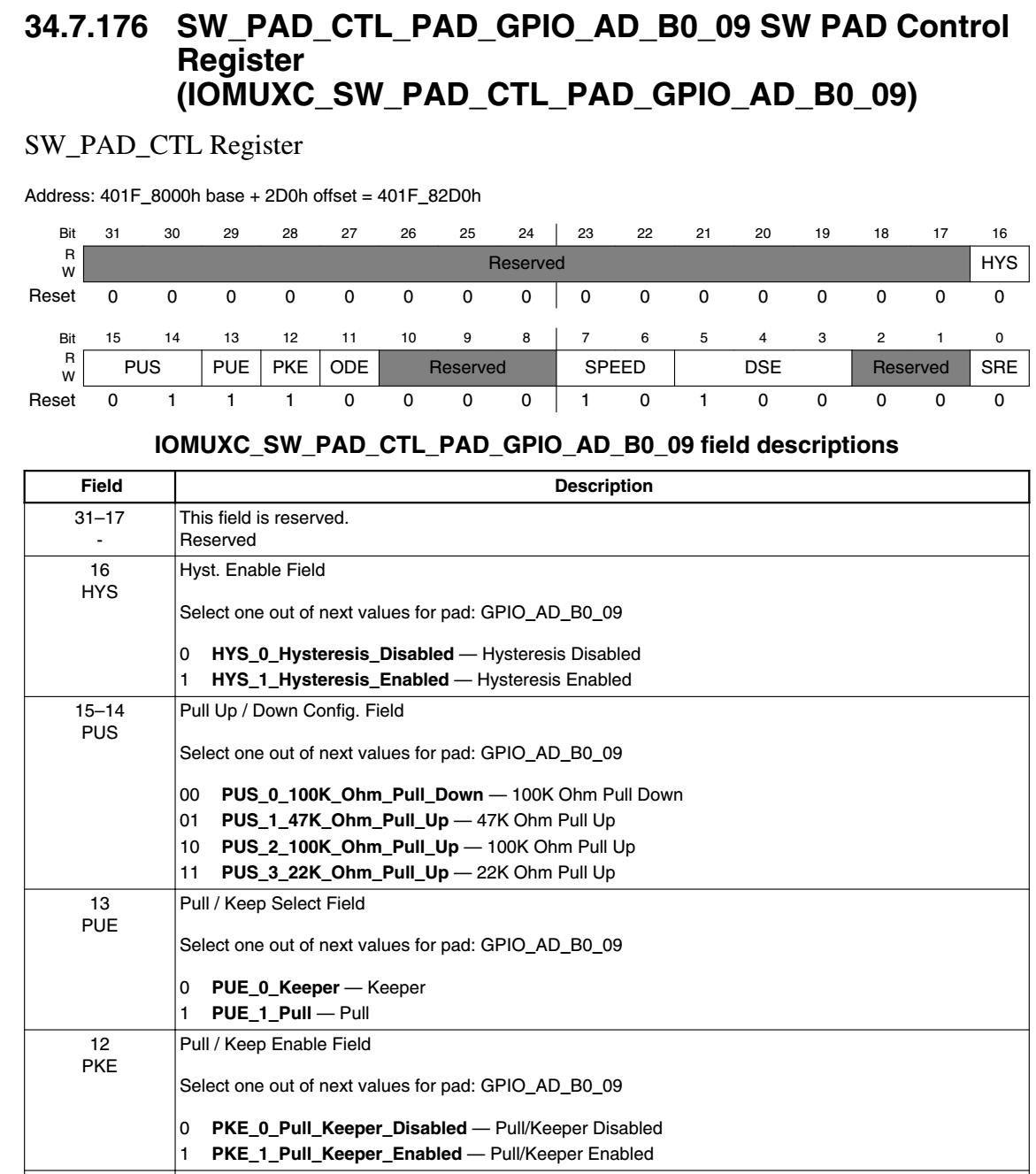
图 7‑6 参考手册中对GPIO1.9引脚PAD配置寄存器的说明(部分)
相对来说PAD寄存器的配置项就更丰富了,而且图中仅是该寄存器的部分说明,仔细看这些配置项,它们就是前面图 7‑2介绍的各项属性,如HYS设置使用施密特模式的滞后功能,PUS配置上下拉电阻的阻值,其它的还包含PUE、PKE、ODE、SPEED、DSE及SRE的配置。
7.2.1.3. Block外设功能控制块¶
Block是外设功能控制块,例如具有ENET的数据接收功能的引脚,它就需要网络外设ENET的支持,具有PWM输出功能的引脚,它需要PWM外设的支持,这些外设在芯片内部会有独立的功能逻辑控制块,这些控制块通过IOMUX的复用信号与IO引脚相连。使用时通过IOMUX选择具体哪个外设连接到IO。
7.2.1.4. GPIO外设¶
GPIO模块是每个IO都具有的外设,它具有IO控制最基本的功能,如输出高低电平、检测电平输入等。它也占用IOMUX分配的复用信号,也就是说使用GPIO模块功能时同样需要使用IOMUX选中GPIO外设。图中的GPIO.DR、GPIO.GDIR、GPIO.PSR等是指GPIO外设相关的控制寄存器,它们分别是数据寄存器、方向寄存器以及引脚状态寄存器,功能介绍如下:
7.2.1.4.1. GPIO.GDIR方向寄存器¶
控制一个GPIO引脚时,要先用GDIR方向寄存器配置该引脚用于输出电平信号还是用作输入检测。典型的例子是使用输出模式可以控制LED灯的亮灭,输入模式时可以用来检测按键是否按下。
GDIR寄存器的每一个数据位代表一个引脚的方向,对应的位被设置为0时该引脚为输入模式,被设置为1时该引脚为输出模式,具体见图 7‑7。
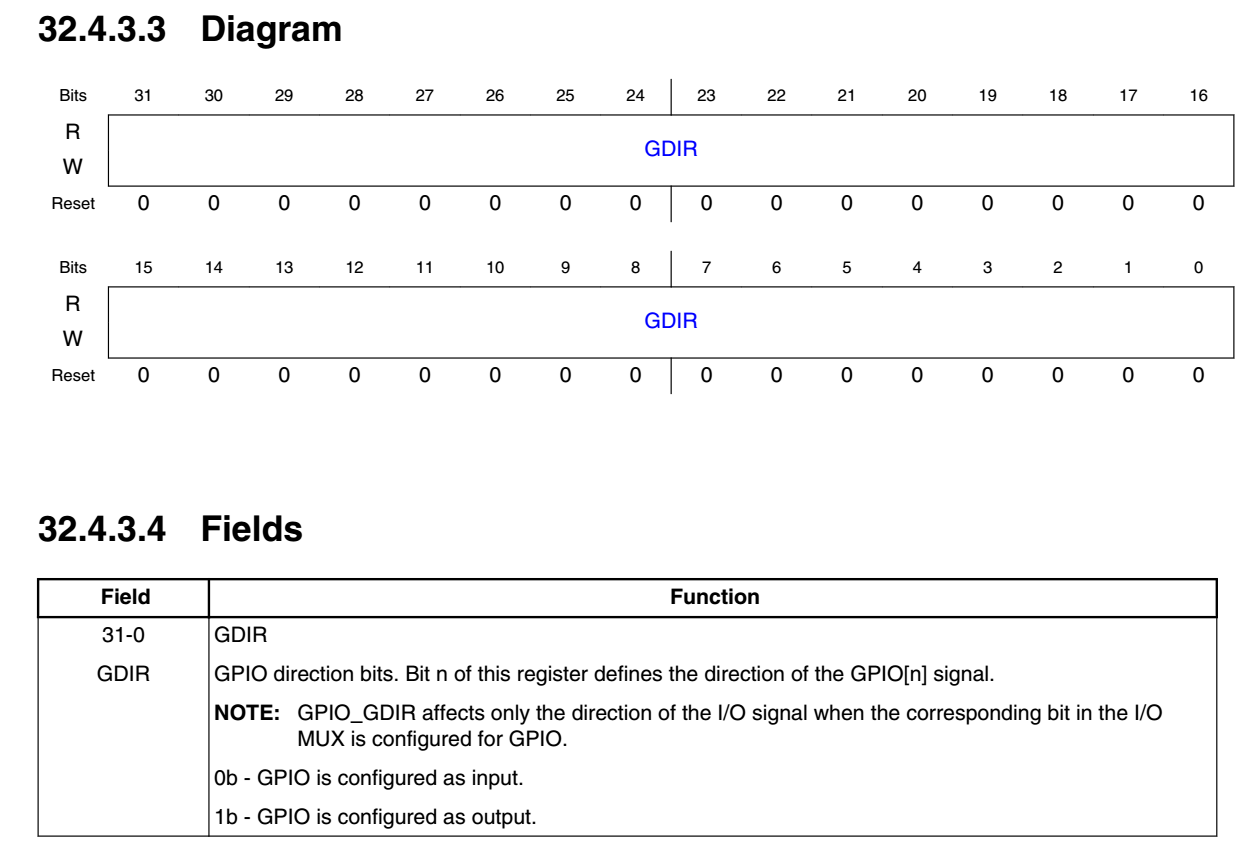
图 7‑7 参考手册中对GDIR的寄存器说明
例如,对GPIO1的GDIR寄存器的bit3位被写入为1,那么GPIO1.3引脚的模式即为输出。
7.2.1.4.2. GPIO.DR数据寄存器¶
DR数据寄存器直接代表了引脚的电平状态,它也使用1个数据位表示1个引脚的电平,每位用1表示高电平,用0表示低电平。DR寄存器在参考手册中的说明见图 7‑8。
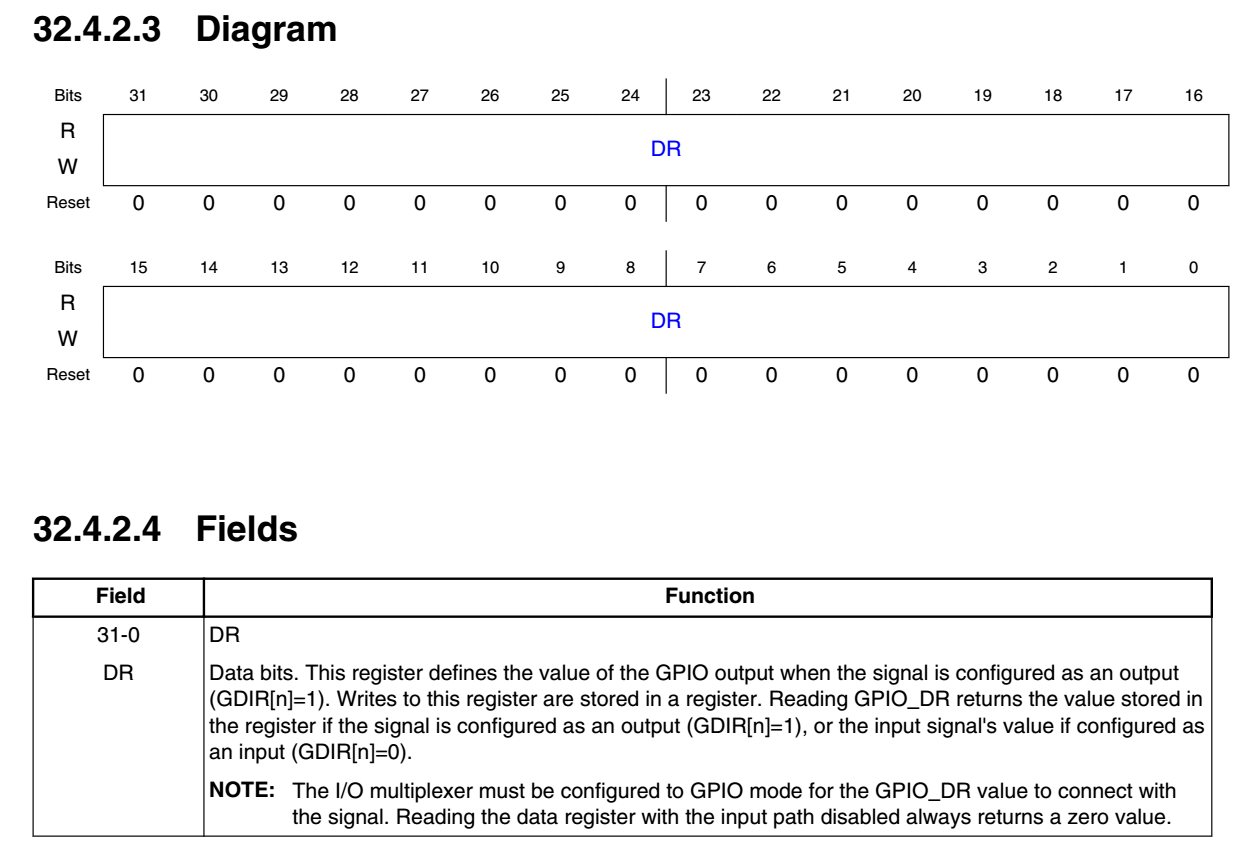
图 7‑8 参考手册中对DR数据寄存器的说明
当GDIR方向寄存器设置引脚为输出模式时,写入DR数据寄存器对应的位即可控制该引脚输出的电平状态,如这时GPIO1的DR寄存器的bit3被写入为1,则引脚为输出高电平。
当GDIR方向寄存器设置引脚为输入模式时,读取DR数据寄存器对应的位即可获取该引脚当前的输入电平状态,例如这里读取GPIO1的DR寄存器的bit3,得到该位的值为0,表示当前引脚的输入状态为低电平。
7.2.1.4.3. GPIO.PSR引脚状态寄存器¶
PSR引脚状态寄存器相当于DR寄存器的简化版,它仅在GDIR方向寄存器设置为输入模式时有效,它的每个位表示一个引脚当前的输入电平状态。PSR寄存器的权限是只读的,对它进行写操作是无效的。
特别地,当引脚被配置成输出模式时,若IOMUXC中的MUX寄存器使能了SION功能(输出通道回环至输入),可以通过PSR寄存器读取回引脚的状态值。
7.2.1.5. 与其它引脚的连接¶
GPIO功能框中的第5项表示另一个引脚PAD2,它与PAD1有一根信号线连接,表示部分引脚的输出可以作为另一个引脚的输入。
7.3. 实验:使用寄存器点亮LED灯¶
本小节中,我们以实例讲解如何通过控制寄存器来点亮LED灯。此处侧重于讲解原理,请您直接用KEIL5软件打开我们提供的实验例程配合阅读,先了解原理,学习完本小节后,再尝试自己建立一个同样的工程。本节配套例程名称为“使用寄存器点亮LED灯”,在工程目录下找到后缀为“.uvprojx”的文件,用KEIL5打开即可。
自己尝试新建工程时,请对照查阅《新建工程—寄存器版》章节。若没有安装KEIL5软件,请参考《如何安装KEIL5》章节。
打开该工程,具体见图 7‑9,可看到一共有三个文件,分别startup_MIMXRT1052.s、MIMXRT1052.h 以及main.c,接下来我们讲会对这三个工程文件进行讲解。
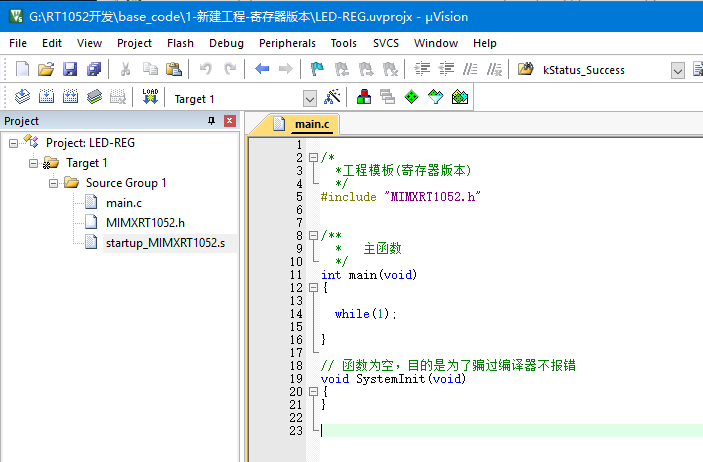
图 7‑9 工程文件结构
7.3.1. 硬件连接¶
在本教程中核心板上RT1052芯片的GPIO1_IO09引脚与一个LED灯连接,这可以在核心板原理图查到,具体见图 7‑10。注意:如果以后硬件有升级,则以最新的硬件接线为主,不要纠结与具体使用的是哪个IO,重点是要掌握原理。
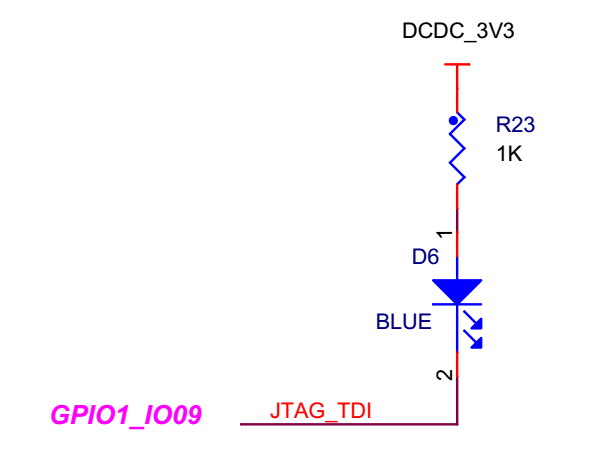
图 7‑10 LED灯电路连接图,摘自《野火i.MX RT1052核心板原理图》
图 7‑10表示LED灯的阳极串联一个电阻与电源3.3V相连,阴极与标号为JTAG_TDI的引脚相连,所以当JTAG_TDI引脚为低电平的时候,LED灯就会被点亮。在RT1052芯片中这个JTAG_TDI引脚同时是GPIO1_IO09引脚,即GPIO1端口编号为9的引脚。
单看LED灯部分的原理图,有时并不清楚这个JTAG_TDI引脚与电路中的其它模块是如何连接的,这时就可以在pdf软件的搜索栏输入要查询的引脚标号查看其它模块的连接了,见图 7‑11。
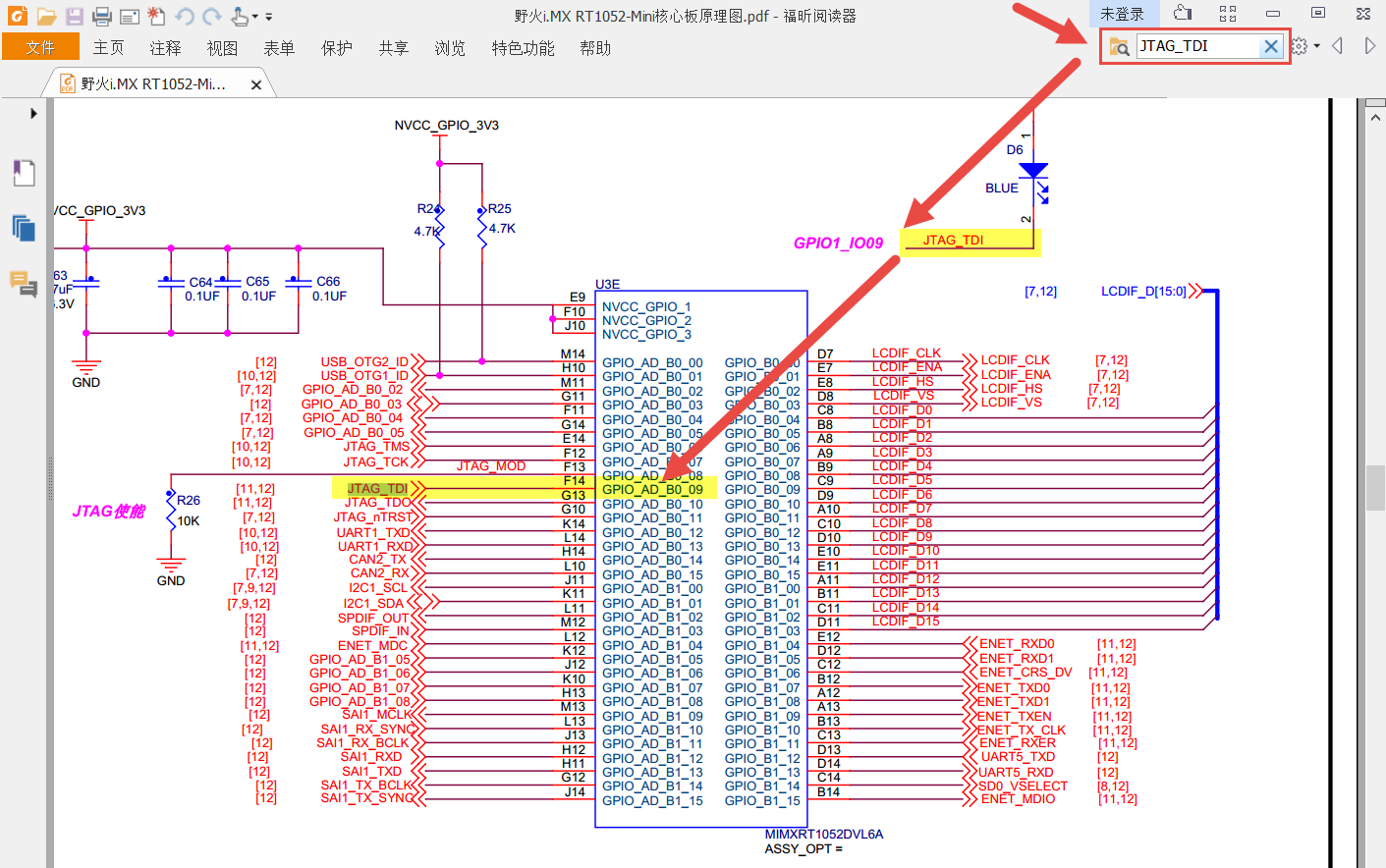
图 7‑11在原理图中查找引脚标号,摘自《野火i.MX RT1052核心板原理图》
这个电路模块包含了RT1052芯片的部分引脚,从中可以查询到标号为JTAG_TDI的信号直接与芯片的GPIO_AD_B0_09引脚相连,在芯片的参考手册中,就是直接用这个引脚名命名寄存器的,如它对应的MUX寄存器名为:SW_MUX_CTL_PAD_GPIO_AD_B0_09,了解这些在后续写程序的时候会方便我们查阅相关资料。
现在,我们的目标是把这个与LED灯相连的GPIO_IO09(GPIO_AD_B0_09)引脚设置成输出模式并且输出低电平,这样就能让LED灯亮起来了。
7.3.2. 启动文件¶
名为“startup_MIMXRT1052.s”的文件,它里边使用汇编语言写好了基本程序,当RT1052芯片上电启动的时候,首先会执行这里的汇编程序,从而建立起C语言的运行环境,所以我们把这个文件称为启动文件。该文件使用的汇编指令是Cortex-M7内核支持的指令,指令的说明可从《cortex_m7_trm》(Cortex-M7技术参考手册)查到。
startup_MIMXRT1052.s文件是由官方提供的,一般有需要也是在官方的基础上修改,不会自己完全重写。该文件可以从 KEIL5 安装目录找到,也可以从 固件库里面找到,找到该文件后把启动文件添加到工程里面即可。不同型号的芯片以及不同编译环境下使用的汇编文件是不一样的,但功能相同。
对于启动文件这部分我们主要总结它的功能,不详解讲解里面的代码,其功能如下:
初始化堆栈指针SP;
初始化程序计数器指针PC;
设置堆、栈的大小;
设置中断向量表的入口地址;
调用SystemInit() 函数配置RT1052的系统时钟。
设置C库的分支入口“__main”(最终用来调用main函数);
先去除繁枝缛节,挑重点的讲,看完这部分只要大致了解芯片的启动过程即可,后面还会有专门的章节进行讲解。首先介绍在启动文件中定义的中断向量表,见代码清单 7‑1。在实际工程中阅读时,可使用编辑器的搜索(Ctrl+F)功能查找这段代码在文件中的位置。
1 2 3 4 5 6 | __Vectors DCD |Image$$ARM_LIB_STACK$$ZI$$Limit| ; 栈顶
DCD Reset_Handler ; Reset Handler复位中断
DCD NMI_Handler ;NMI Handler
DCD HardFault_Handler ;Hard Fault Handler
;...以下内容省略...
__Vectors_End
|
这里只是截取了源代码中的一小部分,在工程中还有很长的一列清单,我们把这个清单称之为中断向量表。在内核中存在中断机制,可以让它中断当前正在执行的代码而跳转去执行紧急的事情。这就如同一个人正在阅读书籍,此时电话响起,此人中断阅读而去接听电话,内核的中断机制也是这样的。
在代码中使用DCD指令定义的这些Reset_Handler、NMI_Handler就是代表了不同的中断事件,它们实质上是一些函数名,与C语言类似,函数名就是内存地址,当中断事件产生时,内核会跳转到对应函数所在的地址执行中断处理代码。
特别地,代码中的第1行“|Image\$\$ARM_LIB_STACK\$\$ZI$$Limit|”是为C语言准备的栈顶地址(Top of Stack)。系统需要为C语言的运行提供环境,其中最重要的就是栈(Stack),它是一段内存空间,C语言代码中的局部变量就是存储在栈内的。这段定义栈顶的代码就是明确了提供给C语言的这个栈空间有多大。
在这段代码中包含了两个标号“__Vectors”和“__Vectors_End”,它们分别表示中断向量表的开头和结尾地址,也就是说,标号__Vectors表示的地址中存储了栈顶地址。
在中断向量表之后,是Reset_Handler程序,它是芯片复位后立即执行的程序,代码见代码清单 7‑2。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | ; Reset Handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT SystemInit ; 函数声明,表明这是外部函数
IMPORT __main ; 函数声明,表明这是外部函数
CPSID I ; 屏蔽中断
LDR R0, =0xE000ED08 ; 0xE000ED08是中断向量表偏移寄存器VTOR的地址
; 把该地址加载到R0
LDR R1, =__Vectors ; __Vectors是前文定义的中断向量表首地址
; 把该地址加载到R1
STR R1, [R0] ; 把R1中的内容加载到R0地址指定的内存中
; 即把中断向量表首地址存储到中断向量表偏移寄存器中
LDR R2, [R1] ; 把R1中的数指定的地址的内容加载到R2
; 即把中断向量表首地址的内容(栈顶)加载到R2寄存器
MSR MSP, R2 ; 把栈顶加载到MSP,设置好SP指针
LDR R0, =SystemInit ; 加载SystemInit函数地址到R0
BLX R0 ; 跳转到R0地址,即调用函数SystemInit
CPSIE i ; 取消屏蔽中断
LDR R0, =__main ; 加载__main函数地址到R0
BX R0 ; 跳转到R0地址,即调用函数__main
ENDP
|
开头的是程序注释,在汇编里面注释用的是“;”,相当于 C 语言的“//”注释符
第2行是定义了一个子程序:Reset_Handler。PROC 是子程序定义伪指令。这里就相当于C语言里定义了一个函数,函数名为Reset_Handler。
第3行 EXPORT 表示 Reset_Handler 这个子程序可供其他模块调用。相当于C语言的函数声明。关键字[WEAK] 表示弱定义,如果编译器发现在别处定义了同名的函数,则在链接时用别处的地址进行链接,如果其它地方没有定义,编译器也不报错,以此处地址进行链接,这就正好体现了弱定义的弱。
第4行和第5行 IMPORT 说明 SystemInit 和__main 这两个标号在其他文件,在链接的时候需要到其他文件去寻找。相当于C语言中,从其它文件引入函数声明。以便下面对外部函数进行调用。
SystemInit 需要由我们自己实现,即我们要编写一个具有该名称的函数,用来初始化 RT1052 芯片系统,如芯片内的浮点运算单元、系统定时器、看门狗以及指令缓存,一般来说可在此处初始化芯片的基础功能。使用固件库编程的时候,SystemInit这个函数在固件库文件system_MIMXRT1052.c文件中由NXP实现。
__main 其实不是我们定义的(不要与C语言中的main函数混淆),当编译器编译时,只要遇到这个标号就会定义这个函数,该函数的主要功能是:负责初始化栈、堆,配置系统环境,准备好C语言并在最后跳转到用户自定义的 main 函数,从此来到 C 的世界。
第7行是内核真正执行的第一条指令,它首先屏蔽了所有中断,防止内核还没准备好就产生中断而导致错误。
第8至16行主要就是放置向量表及设置栈顶,其中0xE000ED08是内核的中断向量表偏移寄存器(VTOR),代码把标号__Vectors表示的地址存储到了中断向量偏移寄存器中,当中断事件产生时,内核就会先从VTOR找到向量表,然后再跳转到中断处理函数。另外还把栈顶地址加载到了MSP寄存器作为栈顶。
第17行把 SystemInit 的地址加载到寄存器 R0。
第18行程序跳转到 R0 中的地址执行程序,即执行SystemInit函数的内容。
第19行取消屏蔽中断,也就是说程序执行到此处时,内核已经做好了处理中断的准备。
第20行把__main 的地址加载到寄存器 R0。
第21行程序跳转到 R0 中的地址执行程序,即执行__main函数,执行完毕之后就去到我们熟知的 C 世界,进入main函数。
第22行表示子程序的结束。
总之,看完这段代码后,了解到如下内容即可:我们需要在外部定义一个SystemInit函数设置RT1052的时钟;RT1052上电后,会执行SystemInit函数,最后执行我们C语言中的main函数。
7.3.3. MIMXRT1052.h文件¶
看完启动文件,那我们立即写SystemInit和main函数吧?别着急,定义好了SystemInit函数和main我们又能写什么内容?连接LED灯的GPIO引脚,是要通过读写寄存器来控制的,就这样空着手,如何控制寄存器。在上一章,我们知道寄存器就是特殊的内存空间,可以通过指针操作访问寄存器。所以此处我们根据RT1052的存储器映射先定义好各个寄存器的地址,把这些地址定义都统一写在MIMXRT1052.h文件中,见代码清单 7‑3。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 | /* 地址可查阅 参考手册-GPIO章节-GPIO Memory Map */
/* GPIO1外设基地址 */
#define GPIO1_BASE (unsigned int)(0x401B8000u)
/* GPIO1寄存器地址,强制转换成指针 */
#define GPIO1_DR *(unsigned int*)(GPIO1_BASE+0x00)
#define GPIO1_GDIR *(unsigned int*)(GPIO1_BASE+0x04)
#define GPIO1_PSR *(unsigned int*)(GPIO1_BASE+0x08)
#define GPIO1_ICR1 *(unsigned int*)(GPIO1_BASE+0x0C)
#define GPIO1_ICR2 *(unsigned int*)(GPIO1_BASE+0x10)
#define GPIO1_IMR *(unsigned int*)(GPIO1_BASE+0x14)
#define GPIO1_ISR *(unsigned int*)(GPIO1_BASE+0x18)
#define GPIO1_EDGE_SEL *(unsigned int*)(GPIO1_BASE+0x1C)
/* 地址可查阅 参考手册-IOMUXC章节-IOMUXC Memory Map/Register Definition */
/* IOMUXC基地址 */
#define IOMUXC_BASE (unsigned int)(0x401F8000u)
/* MUX模式选择寄存器 IOMUXC_SW_MUX_CTL_PAD_GPIO_AD_B0_09 ,强制转换成指针*/
#define IOMUXC_MUX_GPIO_AD_B0_09 *(unsigned int*)(IOMUXC_BASE + 0xE0 )
/* PAD属性设置寄存器 IOMUXC_SW_PAD_CTL_PAD_GPIO_AD_B0_09 ,强制转换成指针*/
#define IOMUXC_PAD_GPIO_AD_B0_09 *(unsigned int*)(IOMUXC_BASE + 0x2D0 )
/* 地址可查阅 参考手册-CCM章节-CCM Memory Map/Register Definition */
/* 时钟控制外设基地址 */
#define CCM_BASE (unsigned int)(0x400FC000u)
/* 时钟配置寄存器CCM_CCGR1地址 */
#define CCM_CCGR1 *(unsigned int*)(CCM_BASE + 0x6C)
|
GPIO外设的地址跟上一章讲解的相同,不过此处把寄存器的地址值都直接强制转换成了指针,方便使用。代码的最后两段是CCM外设寄存器的地址定义,CCM外设是用来设置时钟的,以后我们会详细分析,本实验中只要了解到使用GPIO外设必须开启它的时钟即可。
7.3.4. main文件¶
现在就可以开始编写程序了,在main文件中先编写一个 main 函数,里面什么都没有,暂时为空。
1 2 3 | int main (void)
{
}
|
只写main函数,如果此时直接编译的话,会出现如下错误: “Error: L6218E: Undefined symbol SystemInit (referred from startup_mimxrt1052.o).” 错误提示SystemInit 没有定义。从分析启动文件时我们知道,Reset_Handler 调用了该函数用来初始化RT1052芯片的基础功能,如浮点运算单元、系统定时器、看门狗以及指令缓存,为了简单起见,我们在 main 文件里面定义一个 SystemInit 空函数,什么也不做,为的是骗过编译器,把这个错误去掉。也就是说,不使用这些基础功能,我们也能控制芯片完成点亮LED灯的任务,我们在main中添加SystemInit空函数:
1 2 3 4 | // 函数为空,目的是为了骗过编译器不报错
void SystemInit(void)
{
}
|
这时再编译就没有错了,完美解决。
注意,由于我们在这里没有初始化浮点运算单元,所以请确认工程选项中的浮点运算单元的功能已关闭,见图 7‑12,不关闭该功能编译不会出错,但后程序是无法正常运行的。
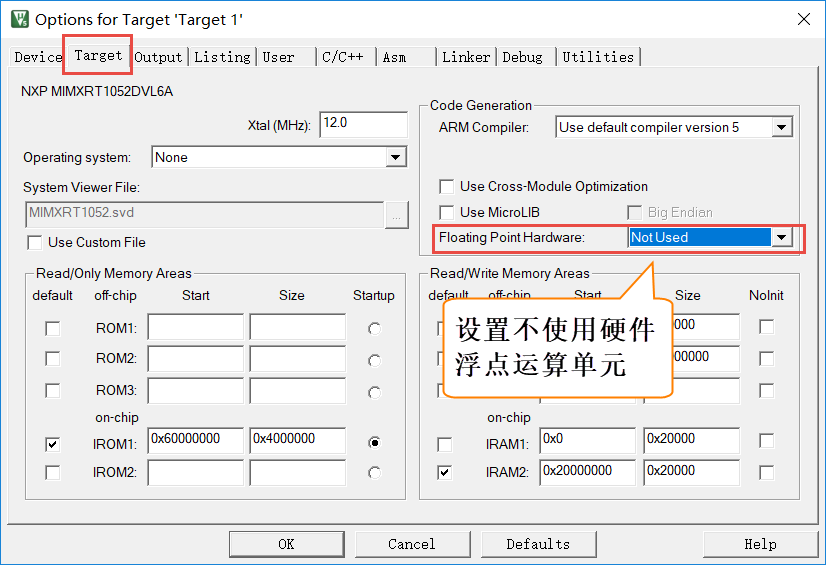
图 7‑12关闭浮点运算单元
接下来在main函数中添加代码,对寄存器进行控制,有关GPIO寄存器的详细描述请阅读《IMXRT1050RM》(参考手册)中IOMUXC以及GPIO章节的寄存器描述部分。
7.3.4.1. IOMUX复用模式¶
由于RT1052芯片每个引脚都连接到多个片上外设,有多种功能,使用时要设置好它与哪个外设相连,也就是说选择引脚的复用模式。
控制LED灯时,只需要控制引脚简单地输出高低电平,所以使用GPIO外设功能即可。在参考手册中找到与该LED灯连接的引脚GPIO_AD_B0_09对应的MUX寄存器 SW_MUX_CTL_PAD_GPIO_AD_B0_09的说明,见图 7‑13。
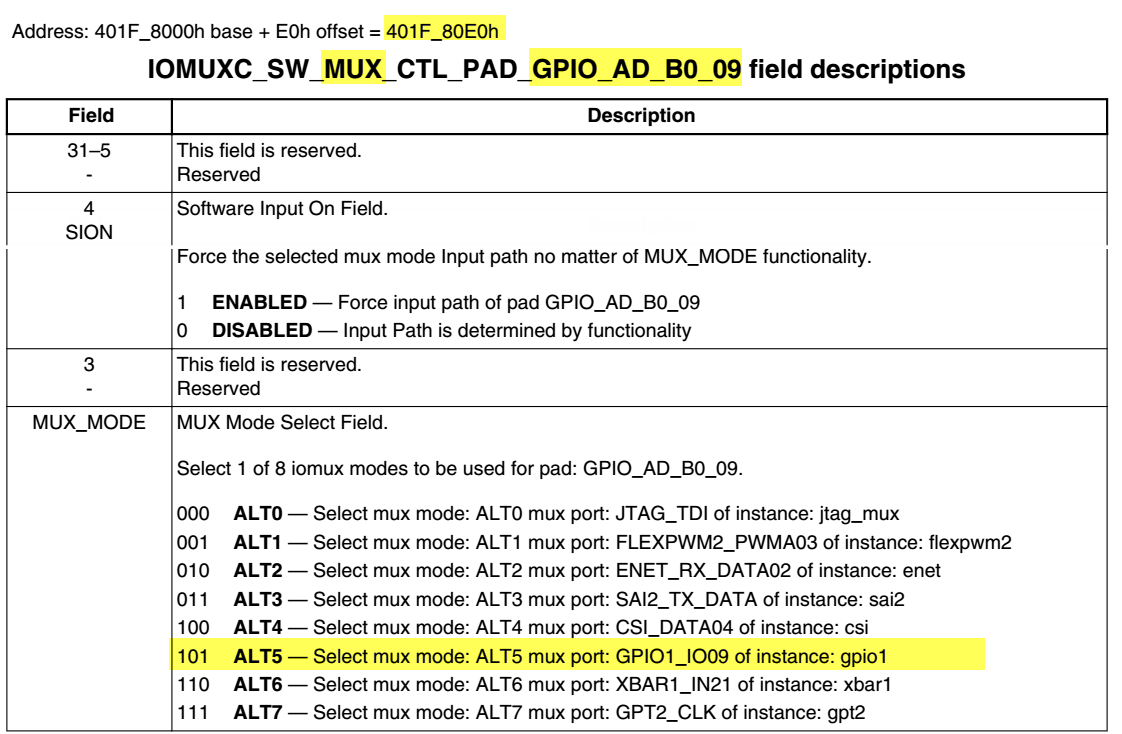
图 7‑13 SW_MUX_CTL_PAD_GPIO_AD_B0_09寄存器说明《IOMUX Controller(IOMUXC)》章节
可以看到,寄存器的MUX_MODE域列出了这个引脚的8个可选功能,把该域设置成0b101即十进制数5即可选中ATL5选项,表示GPIO1_IO09,这个就是引脚的GPIO功能。寄存器还有一个SION配置域,使能了SION的话可以通过GPIO的PSR寄存器读取回引脚的状态,本应用中不需要,所以SION域配置为0不使用即可。对于寄存器的其它部分都是保留域,即芯片厂商并未给它们设置功能,所以都设置成0即可。
也就是说对这个引脚的MUX寄存器,我们给它赋值为5即可控制为GPIO_IO09功能。使用代码设置的方式见代码清单 7‑4。
1 2 | /* 设置MUX寄存器为0x05,表示把引脚用于普通GPIO */
IOMUXC_MUX_GPIO_AD_B0_09 = (unsigned int)0x05;
|
IOMUXC_ MUX _GPIO_AD_B0_09是前面在MIMXRT1052.h头文件定义好的指针,该指针指向GPIO_AD_B0_09引脚(即GPIO1_IO09)的MUX寄存器,并且对该指针进行了“ * ”取值操作,所以这里只要简单地对IOMUXC_ MUX _GPIO_AD_B0_09直接赋值为(unsigned int)0x05即可(程序里习惯使用16进制表示),其中的unsigned int强制转换是确保它是一个32位的无符号数,与寄存器的数据类型对应。
7.3.4.2. PAD属性配置¶
由于每个引脚还有多种属性,所以控制时还要根据需求配置好各种属性。在参考手册中找到与该LED灯连接的引脚GPIO_AD_B0_09对应的PAD寄存器 SW_PAD_CTL_PAD_GPIO_AD_B0_09的说明,见图 7‑14。
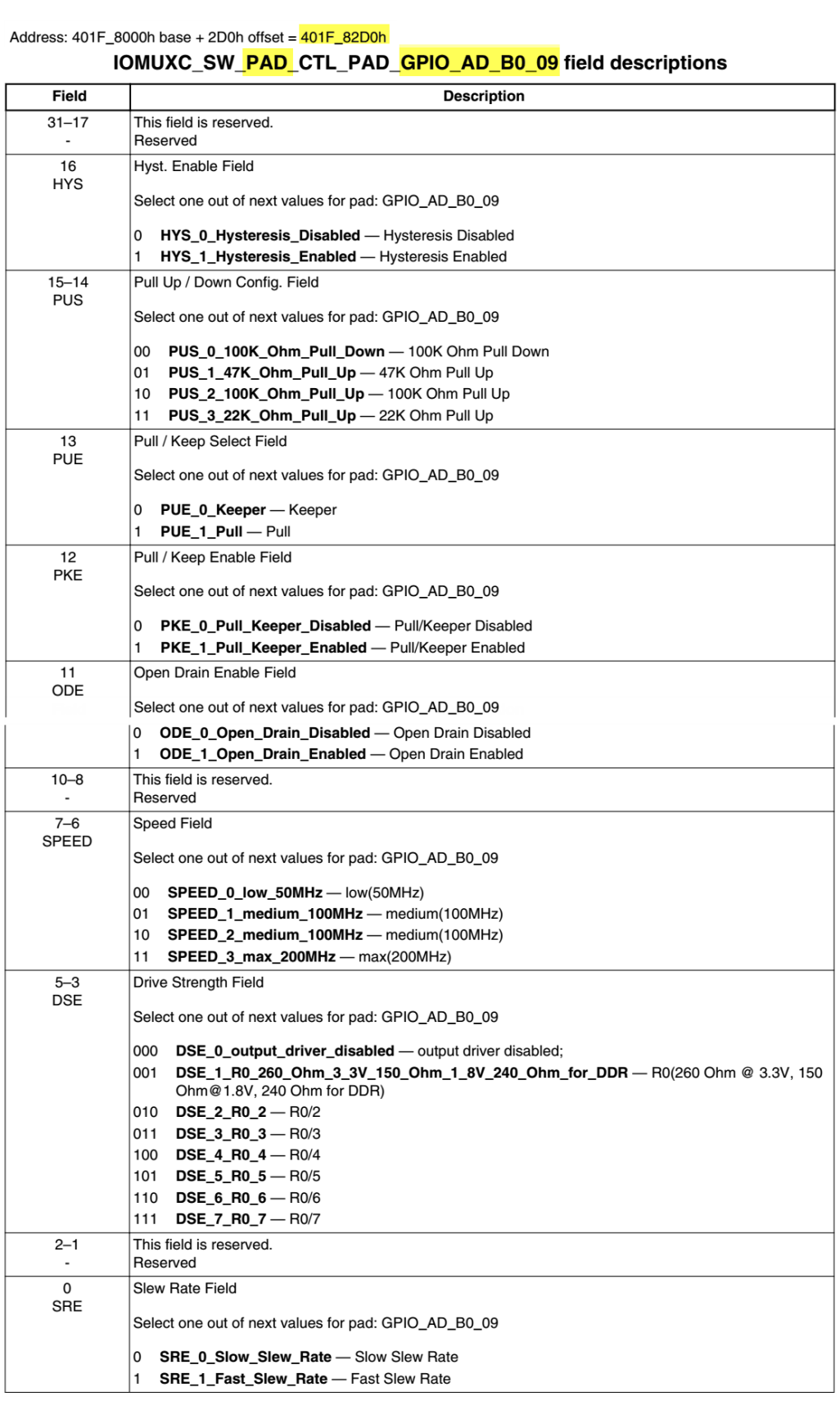
图 7‑14 SW_PAD_CTL_PAD_GPIO_AD_B0_09寄存器说明《IOMUX Controller(IOMUXC)》章节
PAD属性配置寄存器包含输入输出属性、上拉保持器的配置,由于控制LED灯时使用的是输出功能,所以只需要配置输出属性和上拉保持器即可。
7.3.4.2.1. SRE压摆率配置¶
控制LED灯时,对压摆率没什么要求,所以慢速和快速都可以。在本实验中PAD寄存器的位设置为SRE=0b0,即慢压摆率。
7.3.4.2.2. DSE驱动能力¶
DSE可以控制串联一个电阻,可选阻值为R0(260欧姆)、R0/2…R0/7,电阻值的大小会影响通过管脚电流的大小从而影响LED灯的亮度。在本实验中,使用不同阻值时对LED亮度的影响人眼分辨不出来,所以也是随便选择一个即可,这里设置为DSE=0b110,即阻值为R0/6。
7.3.4.2.3. SPEED带宽配置¶
带宽是指引脚支持高低电平切换的最高频率,本实验控制LED灯对于带宽也没有要求,此处直接配置为SPEED=0b10即100MHz。
7.3.4.2.4. ODE开漏输出配置¶
开漏类型不能直接输出高电平,要输出高电平还要在芯片外部接上拉电阻,不符合我们的硬件设计,所以此处我们配置ODE=0b0,不使用开漏模式。
7.3.4.2.5. PKE、PUE及PUS上下拉、保持器配置¶
引脚还包含上下拉和保持器的配置,使用上下拉可以在没控制输出的时候引脚固定在高电平或低电平。在本实验中,控制LED灯最终会把引脚配置成输出模式,在输出模式下不管上下拉及保持器被配置成什么模式,它们都会被自动关闭。也就是说,在控制DR寄存器输出时,引脚会无视上下拉而根据DR寄存器的值输出电平。
为简单起见,控制LED灯时我们直接关闭上下拉及保持器,即PKE=0b0。而PUE用于在PKE使能的时候选择使用上下拉还是保持器,PUS用于工作于上下拉模式时(PKE使能,PUE为上下拉时)选择使用上拉还是下拉以及对应的电阻。因为关闭了上下拉及保持器,所以PUE和PUS为任意值都无影响,此处直接赋值为PUE=0b0, PUS=0b00。
7.3.4.2.6. HYS滞后配置¶
这个是设置是否使用施密特触发器的,只对输入有效,所以这里配置HYS=0b0,不使用该功能。
综上所述,在本实验控制LED灯时,对这个PAD寄存器的配置如下:
位号 |
配置域 |
配置值(二进制) |
功能 |
|---|---|---|---|
0 |
SRE |
0 |
慢压摆率 |
1-2 |
00 |
||
3-5 |
DSE |
110 |
串联电阻R0/6 |
6-7 |
SPEED |
10 |
带宽100MHz |
8-10 |
000 |
||
11 |
ODE |
0 |
不使用开漏模式 |
12 |
PKE |
0 |
关闭上下拉、保持器 |
13 |
PUE |
0 |
|
14-15 |
PUS |
00 |
|
16 |
HYS |
0 |
不使用滞后功能 |
17-31 |
0000 0000 0000 0000 |
把上述配置组合,得到二进制数0b0000 0000 0000 1011 0000,化成十六进制数即为0x000B0,也就是说,我们只要给PAD寄存器赋值为0x000B0即可得到以上配置,写成代码的形式如下,见代码清单 7‑5。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | /* 设置PAD寄存器控制引脚的属性 */
IOMUXC_PAD_GPIO_AD_B0_09 = (unsigned int)0x000B0;
/* 属性配置说明:
十六进制数0x000B0 = 二进制数0b0000 0000 0000 1011 0000
*/
/* bit0: SRE: 0b0 压摆率: 慢压摆率
bit1~bit2: -: 0b00 寄存器保留项
bit3~bit5: DSE: 0b110 驱动强度: R0/6 (仅作为输出时有效 )
bit6~bit7: SPEED:0b10 带宽 : medium(100MHz)
bit8~bit10: -: 0b000 寄存器保留项
bit11: ODE: 0b0 开漏配置: 关闭
(开漏高阻态常用于总线配置,如I2C )
bit12: PKE: 0b0 拉/保持器配置: 关闭
bit13: PUE: 0b0 拉/保持器选择: 关闭了上下拉及保持器,任意值无效
bit14~bit15: PUS: 0b00 上拉/下拉选择: 关闭了上下拉及保持器,任意值无效
bit16: HYS: 0b0 滞回器配置: 关闭
(仅输入时有效,施密特触发器,使能后可以过滤输入噪声)
bit17~bit31: -: 0b0 寄存器保留项
*/
|
类似地,IOMUXC_PAD_GPIO_AD_B0_09也是前面在MIMXRT1052.h头文件定义好的指针,它指向GPIO_AD_B0_09(即GPIO1_09)引脚PAD寄存器,此处直接对IOMUXC_PAD_GPIO_AD_B0_09赋值为计算好的0x070B0即可得到需要的配置。
7.3.4.3. 控制引脚方向¶
控制LED灯需要把GPIO引脚设置为输出模式,这需要配置GPIO外设的GDIR方向寄存器,它在参考手册中的说明见图 7‑15。
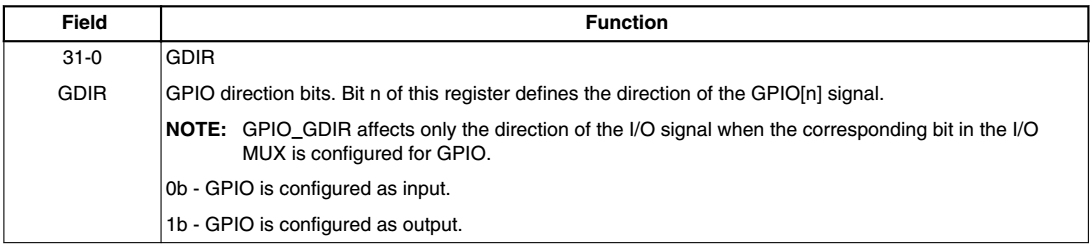
图 7‑15 GPIO的GDIR方向寄存器的说明《General Purpose Input/Output(GPIO)》章节
GDIR寄存器中的每个数据位控制GPIO端口其中一个引脚的方向,为1时表示输出,为0时表示输入。
本实验中要控制的引脚GPIO_AD_B0_09(GPIO1_IO09)是GPIO1端口中编号为9的引脚,所以控制时把GPIO1对应的GDIR寄存器的bit9赋值为1,即可把它设置为输出模式,使用代码实现具体见代码清单 7‑6。
1 2 | /* 设置GPIO1_09引脚的方向,使用输出模式 */
GPIO1_GDIR |= (unsigned int)(1<<9);
|
代码中的说明如下:
GPIO1_GDIR在MIMXRT1052.h头文件已经定义好,它表示的就是GPIO1端口的GDIR寄存器指针,并且包含“* ”取指针操作。
(1<<9)是一个bit9为1的数字,即0x200,通常来说在代码中不会写0x200这样的结果数字,而是用(1<<9)这种运算来表示。如bit10为1的数字,则用(1<<10)表示。
使用“|=”这种位操作方法是为了避免影响到寄存器中的其它位。这种操作的等效代码是
GPIO1_GDIR = GPIO1_GDIR | (unsigned int)(1<<9),
也就是说它会先把GDIR寄存器原来的值读取回来,然后与(1<<9)进行位或运算,再把结果赋值给GDIR。要这样操作的原因是寄存器不能按位读写,假如我们直接给GDIR寄存器赋值:
GPIO1_GDIR = (unsigned int)(1<<9);
那么这代码执行后GPIO1_GDIR的值就变为0x00000200,寄存器的bit9为1,貌似符合我们的预期,但要注意的是GDIR寄存器是同时控制GPIO端口的32个引脚的,经过这样赋值后就只有bit9为1,其余的寄存器位均为0了,假如GDIR的bit0、bit2等寄存器位原值为1,即原本为输出方向,经过这样粗暴的赋值方式就会把它们改为输入方向了。而使用“|=”只会修改bit9,其它寄存器位不变。
7.3.4.4. 控制引脚输出电平¶
设置好引脚方向后,可以通过DR数据寄存器控制引脚的电平,它在参考手册中的说明见图 7‑16。
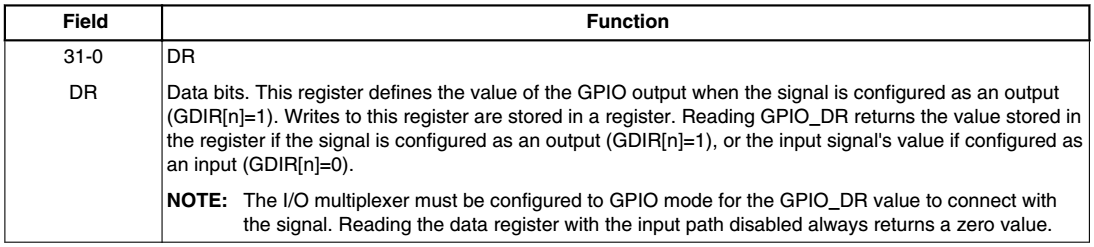
图 7‑16 GPIO的DR数据寄存器的说明《General Purpose Input/Output(GPIO)》章节
类似地,DR数据寄存器中的每个数据位控制GPIO端口其中一个引脚的电平,为1时表示高电平,为0时表示低电平。
在本实验中使用GPIO_IO09连接LED灯,控制时把GPIO1对应的DR寄存器的bit9赋值为1可输出高电平,LED灯灭,给bit9赋值为0可输出低电平,LED灯亮,使用代码实现具体见代码清单 7‑7。
1 2 3 4 5 | /* 控制引脚为高电平,关闭LED灯 */
GPIO1_DR |= (unsigned int)(1<<9);
/* 控制引脚为低电平,点亮LED灯 */
GPIO1_DR &=~ (unsigned int)(1<<9);
|
跟GDIR寄存器的操作方式类似,代码中使用了“&=~”(清0)、“|=”(置位)这些位操作方法来实现对寄存器的写操作,避免影响到寄存器中的其它位。
7.3.4.5. 开启外设时钟¶
设置完GPIO的引脚,控制电平输出,以为现在总算可以点亮 LED 了吧,其实还差最后一步。因为RT1052外设很多,为了降低功耗,每个外设都对应着一个时钟,在芯片刚上电的时候这些时钟都是被关闭的,如果想要外设工作,必须把相应的时钟打开。
RT1052的所有外设的时钟由一个专门的外设来管理,叫 CCM(Clock Controler Module),CCM在《IMXRT1050RM》(参考手册)的第18章有详细的讲解。
有关RT1052的时钟系统我们在往后的CCM章节会详细的讲解,此处我们只需知道在访问GPIO外设的寄存器之前,要先开启它的时钟。
本实验要控制GPIO1相关的引脚,就需要开启GPIO1时钟,即要对CCM_CCGR1寄存器进行配置,该寄存器的在参考手册的说明具体见图 7‑17。
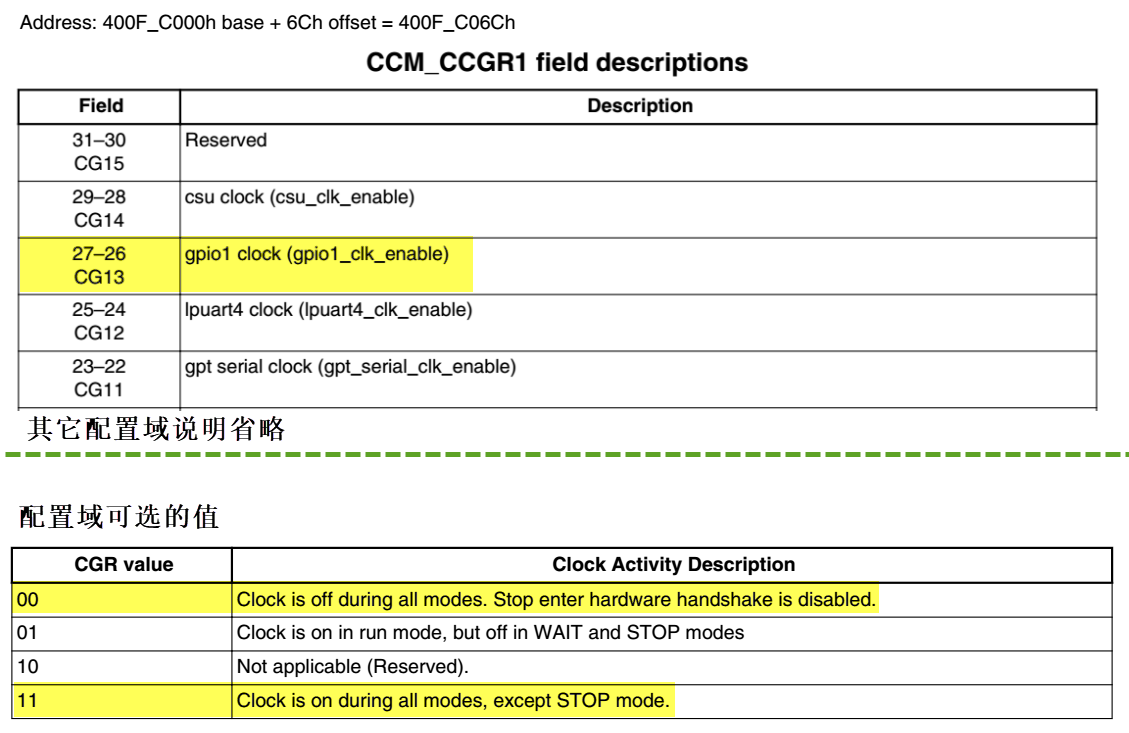
图 7‑17 CCM_CCGR1寄存器说明《Clock Controller Module(CCM)》章节
从图中可以了解到CCM_CCGR1寄存器可以配置很多外设的时钟,如bit28~bit29配置CSU外设时钟,bit26~27配置GPIO1外设时钟,每个配置域包含2位。
这2个位包含3个有效选择,0b00表示该时钟关闭,0b01和0b11表示在RT1052芯片的RUN模式下都开启该时钟。其中RUN、WAIT、STOP是RT1052芯片的运行模式,目前我们只关注RUN模式即可,它指芯片的正常运行状态。
也就是说,我们把CCM_CCGR1寄存器的bit26~bit27设置为0b01或0b11都可以开启GPIO1端口的时钟,本实验把它设置为0b01,具体代码见代码清单 7‑8。
1 2 3 4 5 6 7 | /* 开启GPIO1端口的时钟 */
/* 清空控制GPIO1端口时钟的bit26、bit27 */
CCM_CCGR1 &= ~(unsigned int)(3<<26);
/* 把bit26、bit27设置为0b01,即开启GPIO1时钟 */
CCM_CCGR1 |= (unsigned int)(1<<26);
|
代码说明如下:
CCM_CCGR1在MIMXRT1052.h头文件已经定义好,它表示的就是CCM的CCGR1寄存器指针,并且包含“* ”取指针操作。
(3<<26)表示十六进制数0x0c000000,它的bit26~bit27这2位为1,使用这样的数值与CCM_CCGR1寄存器进行“&=~”操作可以把它的bit26、bit27进行清零,其它位的值不变。代码中(3<<26)的3就是二进制值0b11,2个数字1表示要清空2个寄存器位,26表示bit26,类似地,假如要清除寄存器的bit10、bit11、bit12以及bit13这4位,操作时就使用二进制数0b1111<<10即(0x0F<<10)参与“&=~”运算。
bit26、bit27被清零后,使用(1<<26)与CCM_CCGR1寄存器进行“|=”,把它的bit26、bit27位设置为0b01,即开启GPIO1端口的时钟,然后就可以对GPIO1端口进行操作了。
7.3.4.6. 水到渠成¶
开启时钟,配置引脚复用模式,配置引脚属性,控制电平,经过这几步,我们总算可以控制一个 LED了。现在我们完整组织下用 RT1052控制一个 LED 的代码,见代码清单 7‑9。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 | /**
使用寄存器的方法点亮LED灯
*/
#include "MIMXRT1052.h"
/**
* 主函数
*/
int main(void)
{
/* 开启GPIO1端口的时钟 */
/* 清空控制GPIO1端口时钟的bit26、bit27 */
CCM_CCGR1 &= ~(unsigned int)(3<<26);
/* 把bit26、bit27设置为0b01,即开启GPIO1时钟 */
CCM_CCGR1 |= (unsigned int)(1<<26);
/* 设置MUX寄存器为0x05,表示把引脚用于普通GPIO */
IOMUXC_MUX_GPIO_AD_B0_09 = (unsigned int)0x05;
/* 设置PAD寄存器控制引脚的属性 */
IOMUXC_PAD_GPIO_AD_B0_09 = (unsigned int)0x070B0;
/* 属性配置说明:
十六进制数0x070B0 = 二进制数0b0000 0111 0000 1011 0000
*/
/* bit0: SRE: 0b0 压摆率: 慢压摆率
bit1~bit2: -: 0b00 寄存器保留项
bit3~bit5: DSE: 0b110 驱动强度: R0/6 (仅作为输出时有效 )
bit6~bit7: SPEED:0b10 带宽 : medium(100MHz)
bit8~bit10: -: 0b000 寄存器保留项
bit11: ODE: 0b0 开漏配置: 关闭
(开漏高阻态常用于总线配置,如I2C )
bit12: PKE: 0b1 拉/保持器配置: 使能
bit13: PUE: 0b1 拉/保持器选择: 上下拉
bit14~bit15: PUS: 0b01 上拉/下拉选择: 47K欧上拉
bit16: HYS: 0b0 滞回器配置: 关闭
(仅输入时有效,施密特触发器,使能后可以过滤输入噪声)
bit17~bit31: -: 0b0 寄存器保留项
*/
/* 设置GPIO1_09引脚的方向,使用输出模式 */
GPIO1_GDIR |= (unsigned int)(1<<9);
/* 控制引脚为低电平,点亮LED灯 */
GPIO1_DR &= ~(unsigned int)(1<<9);
while (1);
}
// 函数为空,目的是为了骗过编译器不报错
void SystemInit(void)
{
}
|
注意控制时要先通过CCM_CCGR1寄存器使能GPIO1的时钟,再对GPIO1的寄存器进行操作,否则操作是无效的。
在本章节中,要求完全理解MIMXRT1052.h文件及main文件的内容(CCM相关的除外)。
7.3.5. 下载验证¶
把编译好的程序下载到开发板并复位,可看到核心板上的LED灯被点亮。