14. SPI通信¶
本章通过讲解在应用层中使用SPI总线与外部设备的通讯,讲解Linux系统总线类型设备驱动架构的应用,它与上一章的I2C 总线操作方法非常相似,可以对比学习。
在Linux内核文档的Documentation/SPI目录下有关于SPI驱动非常详细的说明。
本章节的示例代码目录为:base_code/linux_app/spi
14.1. SPI通讯协议简介¶
SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串行外围设 备接口,是一种高速全双工的通信总线。它被广泛地使用在 ADC、 LCD 等设备与 MCU 间,要求通讯速率较高的场合 学习本章时,可与 I2C 章节对比阅读,体会两种通讯总线的差异。下面我们分别对 SPI 协议的物理层及协议层进行讲解。
14.1.1. SPI物理层¶
SPI通讯设备之间的常用连接方式见下图。
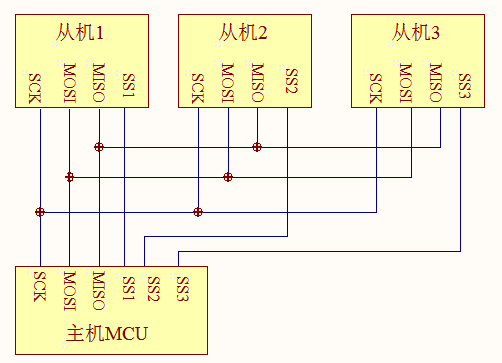
SPI通讯使用3条总线及片选线,3条总线分别为SCK、MOSI、MISO,片选线为 ,它们的作用介绍如下:
(1) ( Slave Select):从设备选择信号线,常称为片选信号 线,也称为NSS、CS,以下用NSS表示。当有多个SPI从设备与SPI主机相连时,设备的其它信 号线SCK、MOSI及MISO同时并联到相同的SPI总线上,即无论有多少个从设备,都共同只使用这3条总线;而每个从设备都有独立的这一条 NSS信号线,本信号线独占主机的一个引脚,即有多少个从设备,就有多少条片选信号线。I2C协议中通过设备地址来寻址、选中总线上的某个设备并与其进行通讯;而SPI协议中没有设备地址,它使用NSS信号线来寻址,当主机要选择从设备时,把该从设备的NSS信号线设置为低电平,该从设备即被选中,即片选有效,接着主 机开始与被选中的从设备进行SPI通讯。所以SPI通讯以NSS线置低电平为开始信号,以NSS线被拉高作为结束信号。
(2) SCK (Serial Clock):时钟信号线,用于通讯数据同步。它由通讯主机产生,决定了通讯的速率,不同的 设备支持的最高时钟频率不一样,如RT1052的SPI时钟频率最大为fpclk/2,两个设备之 间通讯时,通讯速率受限于低速设备。
(3) MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。主机的 数据从这条信号线输出,从机由这条信号线读入主机发送的数据,即这条线上数据的方向为主机到从机。
(4) MISO(Master Input,,Slave Output):主设备输入/从设备输出引脚。主机从这条信号线读 入数据,从机的数据由这条信号线输出到主机,即在这条线上数据的方向为从机到主机。
14.1.2. 协议层¶
与I2C的类似,SPI协议定义了通讯的起始和停止信号、数据有效性、时钟同步等环节。
14.1.2.1. SPI基本通讯过程¶
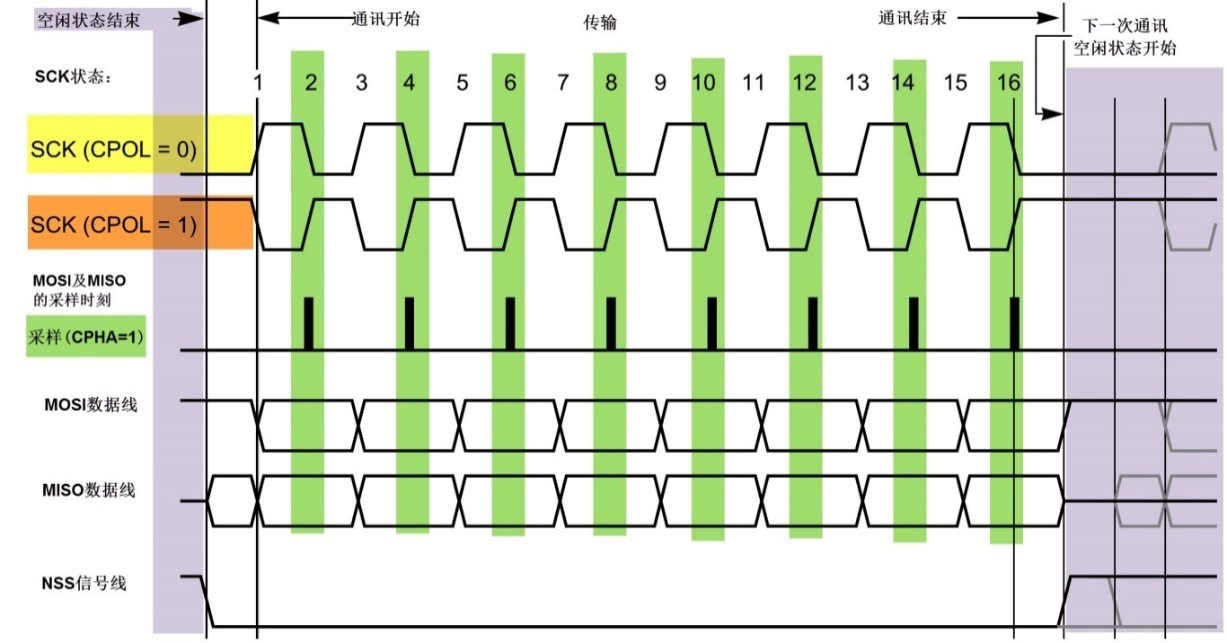
先看看SPI通讯的通讯时序,如下图所示。
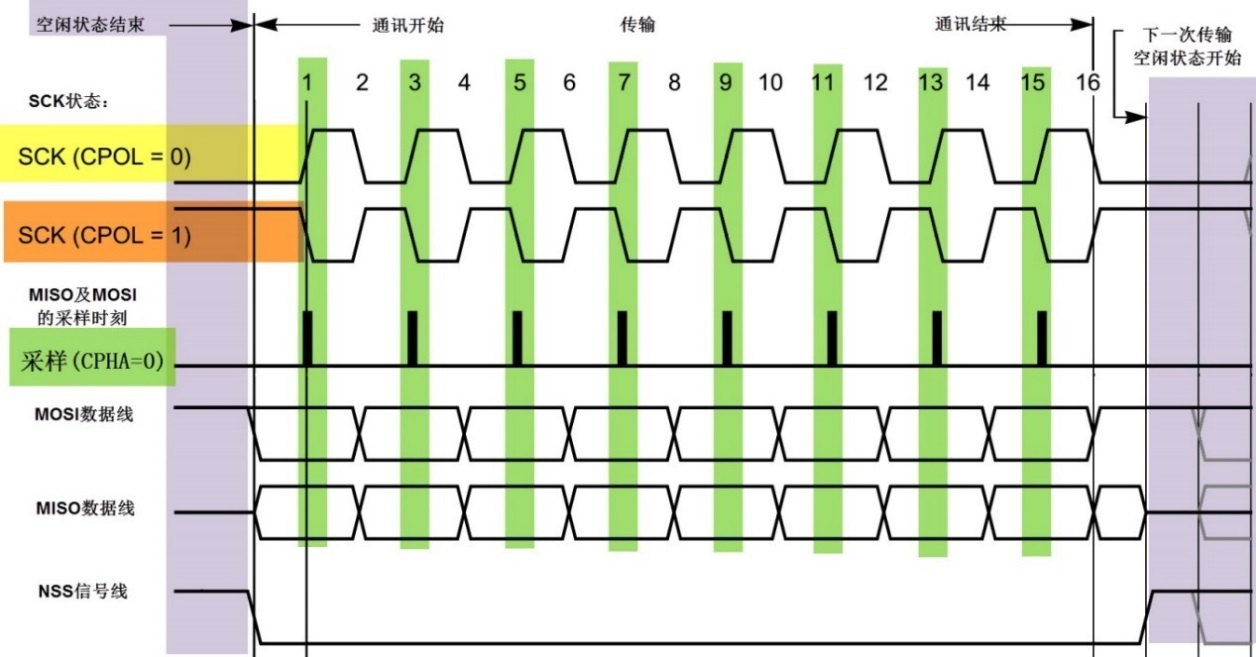
这是一个主机的通讯时序。NSS、SCK、MOSI信号都由主机控制产生,而MISO的信号由从机产生,主机通过该信号线读取从机的数据。MOSI与MISO的信号只在NSS为低电平的时候才有效,在SCK的每个时钟周期MOSI和MISO传输一位数据。
以上通讯流程中包含的各个信号分解如下:
14.1.2.2. 通讯的起始和停止信号¶
在上图中的标号处,NSS信号线由高变低,是SPI通讯的起始信号。NSS是每个从机各自独 占的信号线,当从机检在自己的NSS线检测到起始信号后,就知道自己被主机选中了,开始准备与主机 通讯。在图中的标号处,NSS信号由低变高,是SPI通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
14.1.2.3. 数据有效性¶
SPI使用MOSI及MISO信号线来传输数据,使用SCK信号线进行数据同步。MOSI及MISO数据线在SCK的每个时钟周期传输一位数据,且数据输入输出是同时进行的。数据传输时,MSB 先行或LSB先行并没有作硬性规定,但要保证两个SPI通讯设备之间使用同样的协定,一般都会采用上图中的MSB先行模式。
观察图中的标号处,MOSI及MISO的数据在SCK的上升沿期间变化输出,在SCK的下降沿时被采样。即在SCK的下降沿时刻,MOSI及MISO的数据有效,高电平时表示数据“1”,为低电 平时表示数据“0”。在其它时刻,数据无效,MOSI及MISO为下一次表示数据做准备。
SPI每次数据传输可以8位或16位为单位,每次传输的单位数不受限制。
14.1.2.4. CPOL/CPHA及通讯模式¶
上面讲述的图中的时序只是SPI中的其中一种通讯模式,SPI一共有四种通讯 模式,它们的主要区别是总线空闲时SCK的时钟状态以及数据采样时刻。为方便说明,在此 引入“时钟极性CPOL”和“时钟相位CPHA”的概念。
时钟极性CPOL是指SPI通讯设备处于空闲状态时,SCK信号线的电平 信号(即SPI通讯开始前、 NSS线为高电平时SCK的状态)。CPOL=0时, SCK在空闲状态时 为低电平,CPOL=1时,则相反。
时钟相位CPHA是指数据的采样的时刻,当CPHA=0时,MOSI或MISO数据线上的信号 将会在SCK时钟线的“奇数边沿”被采样。当CPHA=1时,数据线在SCK的“偶数边沿”采样。
如下图:
我们来分析这个CPHA=0的时序图。首先,根据SCK在空闲状态时的电平,分为两种情况。SCK信号线在空闲状态为低电平时,CPOL=0;空闲状态为高电平时,CPOL=1。
无论CPOL=0还是=1,因为我们配置的时钟相位CPHA=0,在图中可以看到,采样时刻都是在SCK的奇数边沿。注意当CPOL=0的时候,时钟的奇数边沿是上升沿,而CPOL=1的时候,时钟的奇数边沿是下降沿。所以SPI的采样时刻不是由上升/下降沿决定的。MOSI和MISO数据线的有效信号在SCK的奇数 边沿保持不变,数据信号将在SCK奇数边沿时被采样,在非采样时刻,MOSI和MISO的有效信号才发生切换。
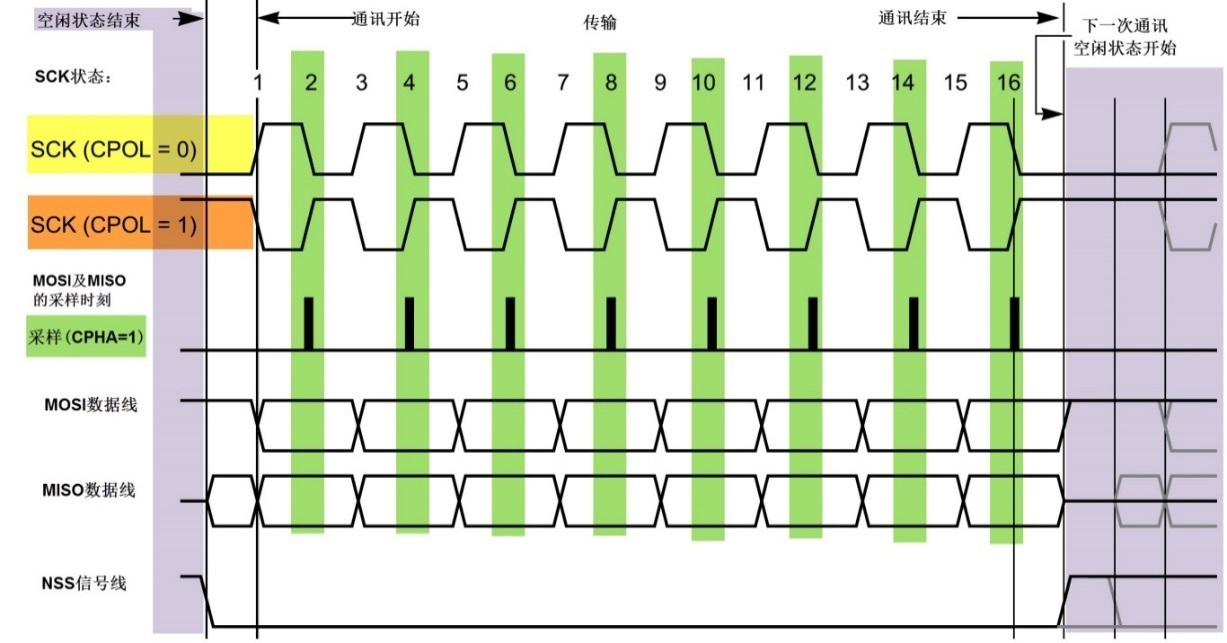
类似地,当CPHA=1时,不受CPOL的影响,数据信号在SCK的偶数边沿被采样。
如下图:
由CPOL及CPHA的不同状态,SPI分成了四种模式,见下表,主机与 从机需要工作在相同的模式下才可以正常通讯,实际中采用较多的是“模式0”与“模式3”。
表 SPI的四种模式
SPI模式 |
CPOL |
CPHA |
空闲时SCK时钟 |
采样时刻 |
|---|---|---|---|---|
0 |
0 |
0 |
低电平 |
奇数边沿 |
1 |
0 |
1 |
低电平 |
偶数边沿 |
2 |
1 |
0 |
高电平 |
奇数边沿 |
3 |
1 |
1 |
高电平 |
偶数边沿 |
14.1.3. 扩展SPI协议(Single/Dual/Quad/Octal SPI)¶
以上介绍的是经典SPI协议的内容,这种也被称为标准SPI协议(Standard SPI)或单 线SPI协议(Single SPI),其中的单线是指该SPI协议中使用单根数据线MOSI进行发送数据,单根数据线MISO进行接收数据。
为了适应更高速率的通讯需求,半导体厂商扩展SPI协议,主要发展出了Dual/Quad/Octal SPI协议,加上 标准SPI协议(Single SPI),这四种协议的主要区别是数据线的数量及通讯方式,具体见下表。
表 四种SPI协议的区别
协议 |
数据线数量及功能 |
通讯方式 |
|---|---|---|
Single SPI(标准SPI) |
1根发送,1根接收 |
全双工 |
Dual SPI(双线SPI) |
收发共用2根数据线 |
半双工 |
Quad SPI(四线SPI) |
收发共用4根数据线 |
半双工 |
Octal SPI(八线SPI) |
收发共用8根数据线 |
半双工 |
扩展的三种SPI协议都是半双工的通讯方式,也就是说它们的数据线是分时进行收发 数据的。例如,标准SPI(Single SPI)与双线SPI(Dual SPI)都是两根数据线,但 标准SPI(Single SPI)的其中一根数据线只用来发送,另一根数据线只用来接收,即全双工;而双线SPI(Dual SPI)的两根线都具有收发功能,但在同一时刻只能是发送或者是接收,即半 双工,四线SPI(Quad SPI)和 八线SPI(Octal SPI)与双线SPI(Dual SPI)类似,只是数据线量的区别。
14.1.4. SDR和DDR模式¶
扩展的SPI协议还增加了SDR模式(单倍速率Single Data Rate)和DDR模式(双倍速率Double Data Rate)。例如在标准SPI协议的SDR模式下,只在SCK的单边沿进行数据传输,即一个SCK时钟只传输一位数据;而在它的DDR模式下,会在SCK的上升沿和下降沿都进行数据传输,即一个SCK时钟能传输两位数据,传输速率提高一倍。
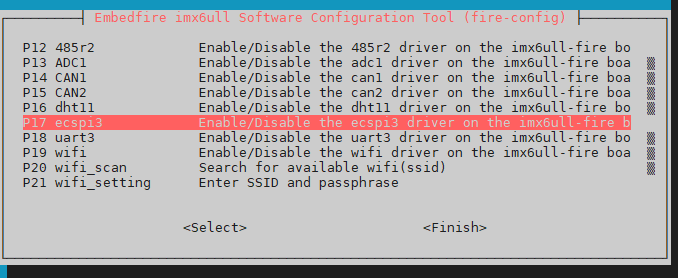
14.1.5. 使能ECSPI_3驱动¶
IMX6ULL的spi接口称为“ECSPI”,它在普通spi接口新加入来一些特性。 但是我们不必过分深入,把它当作普通spi接口使用即可。 IMX6ULL有四个ECSPI接口,本实验主要使用它的第三个。 参考前面《fire-config工具简介》章节,使能exspi_3驱动。
注意:打开spi3时需要手动编辑/boot/uEnv.txt文件,找到“dtoverlay=/lib/firmware/imx-fire-uart2-overlay.dtbo”所在行,在其行首添加符号“#”注释掉改行来关闭串口2,两者存在io复用冲突,不能同时使用。
如下图:
14.1.5.1. 检查SPI 设备¶
使能exspi_3接口驱动后,我们可以通过SPI设备文件来判断spi驱动是否加载成功。 SPI_3对应的设备文件是spidev2.0,这是因为驱动是从0开始编号的。
1 2 | #查看命令
ls /dev/spidev2.0
|
如果ECSPI_3驱动使能了,系统输出如下图所示:
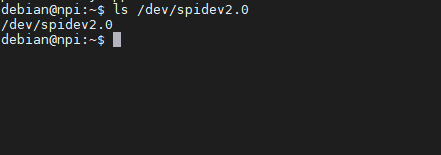
不同版本的Debian镜像输出的内容可能有差别。
14.2. 使能LED设备¶
本实验中将使用到SPI_OLED 显示屏,它的 D/C 引脚用于控制SPI写入的是命令还是数据,因此需要一个普通IO,连接到SPI_OLED的 D/C引脚。 为简化程序设计,我们直接使用RGB灯的“绿灯”控制引脚,使用前需要使能LED设备。系统默认使能LED设备,如果用户自己禁止了,请重新使能。
参考前面《fire-config工具简介》章节,使能LED设备。
如下图:


14.4. SPI回环通讯测试实验¶
本章节的示例代码目录为:base_code/linux_app/spi/spi_test
14.4.1. 硬件说明:¶
上一小节我们添加了SPI 3 的设备驱动,当然这里要操作的是SPI 3。既然是回环测试实 验,我们只需要将SPI 3的 MIOS与MOSI引脚使用跳线帽短接即可。SPI 3 引脚说明以及在开发板上的位置如下所示。
SPI引脚 |
原理图网络标号 |
引脚引出位置(排针) |
|---|---|---|
SPI3_MOSI |
UART2_CTS |
CN4排针 IO1.22 脚 |
SPI3_MISO |
UART2_RTS |
CN4排针 IO1.23 脚 |
SPI3_CLOCK |
UART2_RXD |
CN4排针 IO1.21 脚 |
14.4.2. 代码分析¶
SPI代码与上一章的IIC 非常类似。首先打开SPI对应的设备文件,然后写 入配置参数,这样就完成了SPI的初始化,后面的具体功能实现只需要调用对应的API函数即可。SPI初始化代码如下:
14.4.2.1. SPI 初始化代码¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 | static uint32_t mode = SPI_MODE_2; //用于保存 SPI 工作模式
static uint8_t bits = 8; // 接收、发送数据位数
static uint32_t speed = 500000; // 发送速度
/*
* 初始化SPI
*/
void spi_init(void)
{
int ret = 0;
/*-------------------第一部分-------------------------*/
/*打开 SPI 设备*/
fd = open("/dev/spidev2.0", O_RDWR);
if (fd < 0)
{
pabort("can't open /dev/spidev2.0 ");
}
/*-------------------第二部分-------------------------*/
/*
* spi mode 设置SPI 工作模式
*/
ret = ioctl(fd, SPI_IOC_WR_MODE32, &mode);
if (ret == -1)
pabort("can't set spi mode");
ret = ioctl(fd, SPI_IOC_RD_MODE32, &mode);
if (ret == -1)
pabort("can't get spi mode");
/*-------------------第三部分-------------------------*/
/*
* bits per word 设置一个字节的位数
*/
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits);
if (ret == -1)
pabort("can't set bits per word");
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits);
if (ret == -1)
pabort("can't get bits per word");
/*-------------------第四部分-------------------------*/
/*
* max speed hz 设置SPI 最高工作频率
*/
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed);
if (ret == -1)
pabort("can't set max speed hz");
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed);
if (ret == -1)
pabort("can't get max speed hz");
printf("spi mode: 0x%x\n", mode);
printf("bits per word: %d\n", bits);
printf("max speed: %d Hz (%d KHz)\n", speed, speed / 1000);
}
|
结合代码,简单说明如下:
第一部分,打开SPI 总线的设备文件。设备文件路径“/dev/spidev2.0”,如果打开失败首先要 查看路径是否正确以及设备文件是否存在。打开方式“O_RDWR”,我们要做SPI回环通信测试,所以要以读、写方式打开。
第二部分,设置SPI 工作模式。根据之前讲解,SPI根据相位和极性的不同分为四 种工作模式,在这里四种工作模式为SPI_MODE_x (x = 0、1、2、3)。这里是回环 测试所以设置为任意一种工作模式都可以。需要注意的是我们可以分开设置SPI的读、写工作模式。
第三部分,设置SPI通信过程中一个字节所占的 位数。默认情况下设置为8即可。同样,这里的读、写是分开设置的。
第四部分,设置SPI通信的波特率,这里设置为500K。
经过以上四部分的初始化,SPI已经可以通信了。
14.4.2.2. spi发送函数¶
SPI借助SPI发送结构体spi_ioc_transfer 实现发送,程序中我们只需要将要发送的数据以及必要 的配置参数填入结构体,然后调用ioctl函数执行发送即可。发送函数如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | void transfer(int fd, uint8_t const *tx, uint8_t const *rx, size_t len)
{
int ret;
/*------------------第一部分--------------------*/
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = len,
.delay_usecs = delay,
.speed_hz = speed,
.bits_per_word = bits,
.tx_nbits = 1,
.rx_nbits = 1
};
/*------------------第二部分--------------------*/
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if (ret < 1)
{
pabort("can't send spi message");
}
}
|
函数共有四个参数,fd, 打开SPI设备文件时得到的SPI设备文件描述符,tx,要发送的数据地址,rx,如果是双向传输,rx 用于指定 接收缓冲区的地址。len, 指定本次传输的数据长度,单位为字节。函数实现非常简单,结合代码介绍如下:
第一部分,定义并初始化SPI传输结构体。SPI传输结构体的完整定义如下所示:
结合注释很容易理解,简单说明如下,tx_buf和rx_buf分别为发送、接收缓冲区地址,数据类型为“__u64”,兼容64位系统,64位或32位 由系统自动处理,我们不必关心。len,一次传输的数据长度。speed_hz,指定SPI通信的比特率。delay_usecs,如果不为零则用于设置两次传输之间 的时间延迟。bits_per_word,指定字节长度,既一个字节占用多少比特。cs_change,取消 选中,如果设置为真,则在下次传输之前会取消选中当前的SPI设备,更新片选。tx_nbits,指定“写”数据宽度,SPI 支持 1、2、4位宽度,不过我们使用的SPI3只支持1位数据宽度,该值应当设置为1或0(设置为0表示使用默认的宽度既宽度为1)。pad参数我们没有用到,不用设置。
第二部分,调用ioctl执行发送,参数fd,是SPI设备文件描述符,参数SPI_IOC_MESSAGE(1)用于指定执 行传输次数,我们这里只定义并初始化了一个传输结构体tr,所以传输次数为1。tr 是第一部分设置的传输结构体变量。
14.4.2.3. main函数¶
有了初始化函数和发送函数,SPI回环测试就非常简单了。我们只需要初始化SPI然后调用发送函数,最后打印传输结果如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | /*-------------------第一部分---------------------*/
/*SPI 接收 、发送 缓冲区*/
unsigned char tx_buffer[100] = "hello the world !";
unsigned char rx_buffer[100];
/*-------------------第二部分---------------------*/
int main(int argc, char *argv[])
{
/*初始化SPI */
spi_init();
/*执行发送*/
transfer(fd, tx_buffer, rx_buffer, sizeof(tx_buffer));
/*打印 tx_buffer 和 rx_buffer*/
printf("tx_buffer: \n %s\n ", tx_buffer);
printf("rx_buffer: \n %s\n ", rx_buffer);
close(fd);
return 0;
}
|
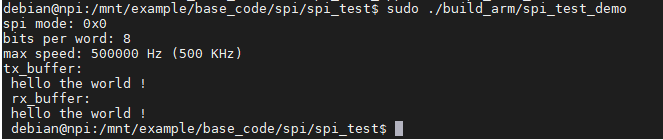
第一部分,tx_buffer是发送缓冲区,rx_buffer是接收缓冲区。第二部分,在main函数中依次调用函数spi_init初始化SPI、调用函数transfer执 行发送。最后分别打印tx_buffer和rx_buffer的内容,正常情况下,程序运行后我们可以在控制终端发现tx_buffer和r x_buffer的内容一致。
14.5. 下载验证¶
对于ARM架构的程序,可使用如下步骤进行编译:
1 2 3 | #在主机的实验代码Makefile目录下编译
#编译arm平台的程序
make ARCH=arm
|
编译后生成的ARM平台程序为build_arm/spi_test_demo,使用网络文件系统共享至开 发板,在开发板的终端上测试即可。
如下图:
14.6. SPI_OLED 显示实验¶
上一小节我们实现了SPI 回环通信,这一小节实现SPI驱动SPI_OLED显示屏。本小节与上一章的IIC驱动IIC_OLED非常相似,仅仅是发送函数不同。
本章节的示例代码目录为:base_code/linux_app/spi/spi_oled
14.6.1. 硬件说明:¶
本实验我们仍然使用SPI 3,OLED使用的是SPI接口0.96寸单色显示屏,详细资料可以在野火电子官网找到。实物如下所示:
SPI_OLED显示屏与开发板连接关系如下表所示
SPI_OLED显示屏 |
SPI引脚 |
原理图网络标号 |
引脚引出位置(排针) |
|---|---|---|---|
MOSI |
SPI3_MOSI |
UART2_CTS |
CN4排针 IO1.22 脚 |
未使用 |
SPI3_MISO |
UART2_RTS |
CN4排针 IO1.23 脚 |
CLK |
SPI3_CLOCK |
UART2_RXD |
CN4排针 IO1.21 脚 |
D/C |
非SPI3引脚 |
CSI_HSYNC |
CN5排针 IO4.20脚 |
CS |
非SPI3引脚 |
GND |
|
GND |
非SPI3引脚 |
GND |
|
VCC |
非SPI3引脚 |
3.3V |
14.6.2. 代码分析¶
SPI_OLED显示实验由SPI回环测试程序修改得到。其中OLED显示相关代码参照IIC驱动OLED显示屏程序。完整 的代码请参考本小节配套源码(位于 base_code/linux_app/spi/spi_oled 目录下)。
14.6.2.1. spi初始化函数¶
这里的SPI初始化函数与上一小节有两点不同。第一,这里增加了一个GPIO设备,用于控制SPI_OLED的 D/C引脚,第 二,这里要设置SPI工作模式为模式二,并且可以不设置读(SPI_OLED是只写的一个设备)。完整初始化代码如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 | /*---------------第一部分------------------*/
static uint32_t mode = SPI_MODE_2; //用于保存 SPI 工作模式
void spi_and_gpio_init(void)
{
int ret = 0;
/*打开 SPI 设备*/
fd = open("/dev/spidev2.0", O_RDWR);
if (fd < 0)
{
pabort("can't open /dev/spidev2.0 ");
}
/*---------------第二部分------------------*/
/*打开 LED 设备*/
data_or_command = open(data_or_command_DEV_path, O_RDWR);
if (fd < 0)
{
pabort("can't open /sys/class/leds/green/brightness");
}
/*---------------第三部分------------------*/
/*
* spi mode 设置SPI 工作模式
*/
ret = ioctl(fd, SPI_IOC_WR_MODE32, &mode);
if (ret == -1)
pabort("can't set spi mode");
ret = ioctl(fd, SPI_IOC_RD_MODE32, &mode);
if (ret == -1)
pabort("can't get spi mode");
/*
* bits per word 设置一个字节的位数
*/
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits);
if (ret == -1)
pabort("can't set bits per word");
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits);
if (ret == -1)
pabort("can't get bits per word");
/*
* max speed hz 设置SPI 最高工作频率
*/
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed);
if (ret == -1)
pabort("can't set max speed hz");
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed);
if (ret == -1)
pabort("can't get max speed hz");
printf("spi mode: 0x%x\n", mode);
printf("bits per word: %d\n", bits);
printf("max speed: %d Hz (%d KHz)\n", speed, speed / 1000);
}
|
对比上一小节我们只关心两部分内容。第一部分,将工作模式mode设置为SPI_MODE_2,在第三部分将会用该变量初始化SPI的读(读设置可省略)、写。第二部分,打开一个LED设备,LED设备实际是一个GPIO,我们程序中将会使用这个引脚控制SPI_OLED的D/C引脚。
14.6.2.2. SPI_OLED命令发送和数据发送函数¶
根据之前讲解,SPI_OLED的D/C引脚用于表示显示屏接收到的是命令还是数据,D/C为低电平,发送的是命令,D/C为高电平发送的是数据。命令发送函数和数据发送函数仅仅是在执行发送之前设置D/C对应引脚的高、低电平。如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 | /*
* 向 SPI_OLED 发送控制命令
* cmd, 要发送的命令。
*/
void spi_oled_send_commend(unsigned char cmd)
{
uint8_t tx = cmd;
uint8_t rx;
write(data_or_command, "255", 3); //设置 SPI_OLED 的 D/C 为低电平
transfer(fd, &tx, &rx, 1); //发送控制命令
}
/*
* 向 SPI_OLED 发送数据
* cmd, 要发送的数据。
*/
void spi_oled_send_data(unsigned char dat)
{
uint8_t tx = dat;
uint8_t rx;
write(data_or_command, "0", 1); //设置 SPI_OLED 的 D/C 为高电平
transfer(fd, &tx, &rx, 1); //发送数据
}
|
14.6.2.3. SPI_OLED初始化代码¶
SPI_OLED初始化分为两部分,首先初始化SPI,然后通过SPI向OLED发送配置参数。部分初始化代码如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | void oled_init(void)
{
/*---------------第一部分------------------*/
/*初始化SPI和D/C控制引脚*/
spi_and_gpio_init();
/*---------------第二部分------------------*/
spi_oled_send_commend(0xae);
spi_oled_send_commend(0xae); //--turn off oled panel
spi_oled_send_commend(0x00); //---set low column address
/*---------------一下代码省略----------------*/
spi_oled_send_commend(0x8d); //--set Charge Pump enable/disable
spi_oled_send_commend(0x14); //--set(0x10) disable
spi_oled_send_commend(0xa4); // Disable Entire Display On (0xa4/0xa5)
spi_oled_send_commend(0xa6); // Disable Inverse Display On (0xa6/a7)
spi_oled_send_commend(0xaf); //--turn on oled panel
/*---------------第三部分------------------*/
OLED_Fill(0x00); //清屏
OLED_SetPos(0, 0); //设置光标到 (0,0)地址处。
}
|
结合代码,简单说明如下:
第一部分,调用spi_and_gpio_init初始化函数,根据之前讲解,该函数初始化了SPI和一个GPIO。初始化完成后我们就可以使用SPI与OLED通信同时也可以通过GPIO控制发送的是命令还是数据。
第二部分,发送OLED初始化参数。第三部分,依次调用清屏函数(使屏幕不显示)和OLED光标设置函 数(将光标设置到起始位置)。
程序中OLED清屏函数、显示字符函数、显示汉字函数以及显示图片函数与IIC驱动IIC_OLED非常相似,只是函数的简单替换,这里不再赘述。
14.6.2.4. main 函数实现¶
main函数中调用OLED基本的显示函数测试OLED,完整代码如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 | int main(int argc, char *argv[])
{
int i = 0; //用于循环
/*---------------第一部分------------------*/
oled_init();
OLED_Fill(0xFF);
sleep(1);
while (1)
{
/*---------------第二部分------------------*/
OLED_Fill(0x00); //清屏
sleep(1);
/*---------------第三部分------------------*/
OLED_ShowStr(0, 3, (unsigned char *)"Wildfire Tech", 1); //测试6*8字符
OLED_ShowStr(0, 4, (unsigned char *)"Hello wildfire", 2); //测试8*16字符
sleep(1);
OLED_Fill(0x00); //清屏
/*---------------第四部分------------------*/
for (i = 0; i < 4; i++)
{
OLED_ShowCN(22 + i * 16, 0, i); //测试显示中文
}
sleep(1);
OLED_Fill(0x00); //清屏
/*---------------第五部分------------------*/
OLED_DrawBMP(0, 0, 128, 8, (unsigned char *)BMP1); //测试BMP位图显示
sleep(1);
OLED_Fill(0x00); //清屏
}
close(fd);
return 0;
}
|
结合代码各部分简单说明如下:
第一部分,初始化oled并全屏显示,我们使用的oled分辨率是128*64(64行,128列)。每个像素点只有亮、灭两种状态(0或1)。
第二部分,清屏。清屏与全屏填充只是函数参数不同,清屏将每个像素点都设置为0,屏幕不亮,全屏填充将所有像素点设置为1,屏幕全亮。
第三部分,设置显示字符串。字符串显示函数在IIC驱动OLED章节已经详细介绍,这里再次简单说明,函数前两个参数分别用于设置字符串起始位置的x、y 坐标,根据选择的字体不同(第四个参数)x,y 的取值范围也不同,以6*8字体为例,x可取0到(128-1-6),减1是因为从零开始计数,减6是因为一个字符宽度为6个像素点,一行剩余的像素点小于6则显示不全,y可取0到7,oled显示屏有64行,每8行像素点被分成一组,所以共有8组,字符的其实位置的y坐标只能取0到7。
第四部分,显示中文。使用中文要有对应的点阵字库,字库制作工具以及制作方法请参考SPI_OLED模块资料,这里不再介绍。
第五部分,显示图片。与显示中文相似,使用显示图片函数之前要将图片转化为点阵数据,制作工具以及制作方法请参考SPI_OLED模块资料。
14.7. 下载验证¶
对于ARM架构的程序,可使用如下步骤进行编译:
1 2 3 | #在主机的实验代码Makefile目录下编译
#编译arm平台的程序
make ARCH=arm
|
编译后生成的ARM平台程序为build_arm/spi_oled_demo,使用网络文件系统共享至开 发板,在开发板的终端上测试即可。