13. ecspi驱动OLED屏实验¶
本章我们以ecspi接口的oled显示屏为例讲解ecspi驱动程序的编写。
本章主要分为四部分内容。
第一部分,ecspi驱动基本知识,简单讲解SPI物理总线、时序和模式。
第二部分,分析ecspi驱动框架和后续使用到的核心数据结构。
第三部分,分析ecspi总线驱动和spi核心层以及spi控制器。
第四部分,编写驱动时会使用到的函数,如同步、异步等。
第五部分,ecspi驱动oled液晶屏。
13.1. ecspi基本知识¶
ecSPI是 Enhanced Configurable SPI 直译为增强可配置SPI,可以理解为是功能更强的SPI接口,
ecspi驱动和我们上章讲解的i2c驱动非常相似,它们都是按照总线、设备驱动模型编写。 ecspi总线驱动由NXP官方编写,ecspi设备驱动需要我们根据实际连接的设备编写对应的驱动,例如spi接口的oled屏,spi接口的外置AD转换新芯片等等。
13.1.1. spi物理总线¶
i2c总线和spi总线都可以挂载多个设备,spi支持一主多从,全双工通信,最大速率可达上百MHz。其中四根控制线包括:
SCK:时钟线,数据收发同步
MOSI:数据线,主设备数据发送、从设备数据接收
MISO:数据线,从设备数据发送,主设备数据接收
NSS、CS:片选信号线
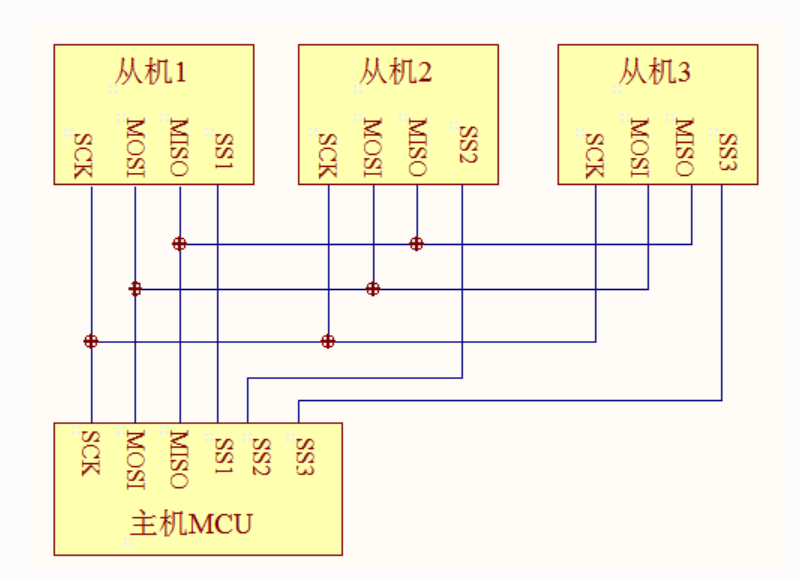
i2c通过i2c设备地址选择通信设备,而spi通过片选引脚选中要通信的设备。
imx6ull的每个ecspi接口提供了4个片选引脚(ss0-ss3),可以连接4个SPI设备,当然也可以使用外部GPIO扩展SPI设备的数量, 这样一个ecspi接口可连接的设备数由片选引脚树决定。
如果使用ecspi接口提供的片选引脚,ecspi总线驱动会处理好什么时候选ecspi设备。
如果使用外部GPIO作为片选引脚需要我们在ecspi设备驱动中设置什么时候选中ecspi。(或者在配置SPI时指定使用的片选引脚)。
通常情况下无特殊要求我们使用ecspi接口提供的片选引脚。
13.1.2. spi时序¶
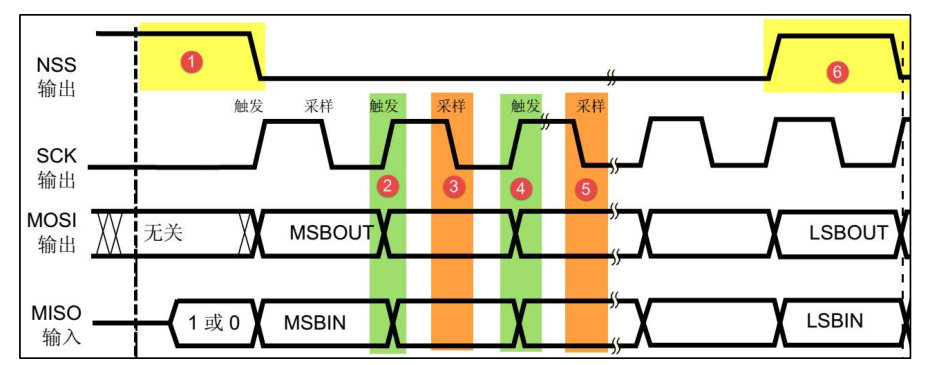
起始信号:NSS 信号线由高变低
停止信号:NSS 信号由低变高
数据传输:在 SCK的每个时钟周期 MOSI和 MISO同时传输一位数据,高/低位传输没有硬性规定
传输单位:8位或16位
单位数量:允许无限长的数据传输
13.1.3. spi通信模式¶
总线空闲时 SCK 的时钟状态以及数据采样时刻

时钟极性 CPOL:指 SPI 通讯设备处于空闲状态时,SCK信号线的电平信号:
CPOL=0时,SCK在空闲状态时为低电平
CPOL=1时,SCK在空闲状态时为高电平
时钟相位 CPHA:数据的采样的时刻:
CPHA=0时,数据在SCK时钟线的“奇数边沿”被采样
CPHA=1时,数据在SCK时钟线的“偶数边沿”被采样
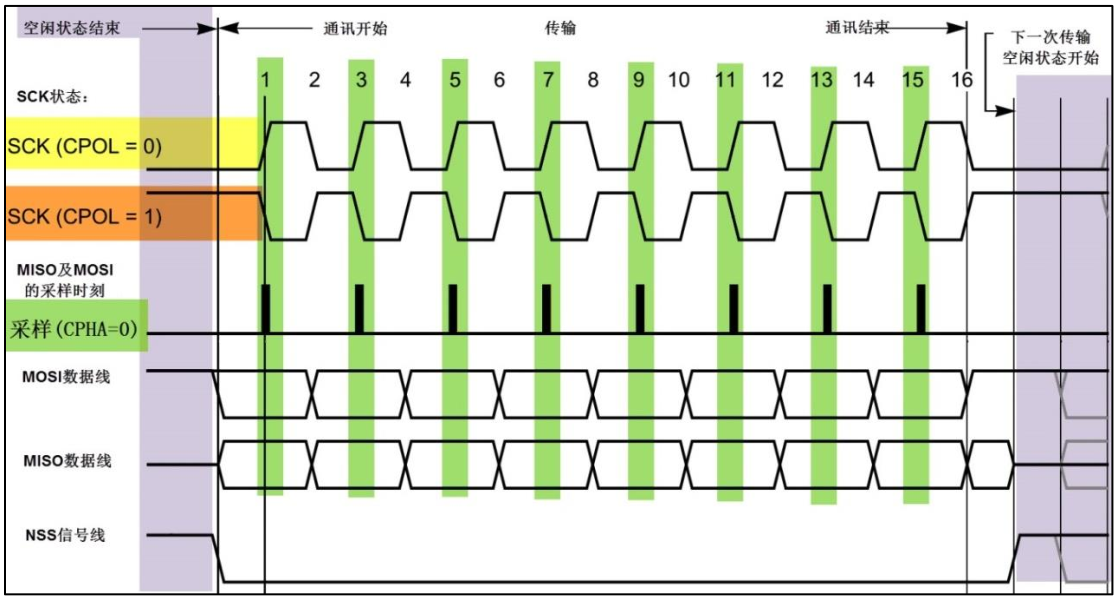
如上图所示:
SCK信号线在空闲状态为低电平时,CPOL=0;空闲状态为高电平时,CPOL=1。 CPHA=0,数据在 SCK 时钟线的“奇数边沿”被采样,当 CPOL=0 的时候,时钟的奇数边沿是上升沿,当 CPOL=1 的时候,时钟的奇数边沿是下降沿。
更多有关SPI通信协议的内容可以参考 【野火®】零死角玩转STM32 中spi章节。
13.2. ecspi驱动框架¶
ecspi设备驱动和i2c设备驱动非常相似,可对比学习。这一小节主要介绍ecspi驱动框架以及主要的结构体。
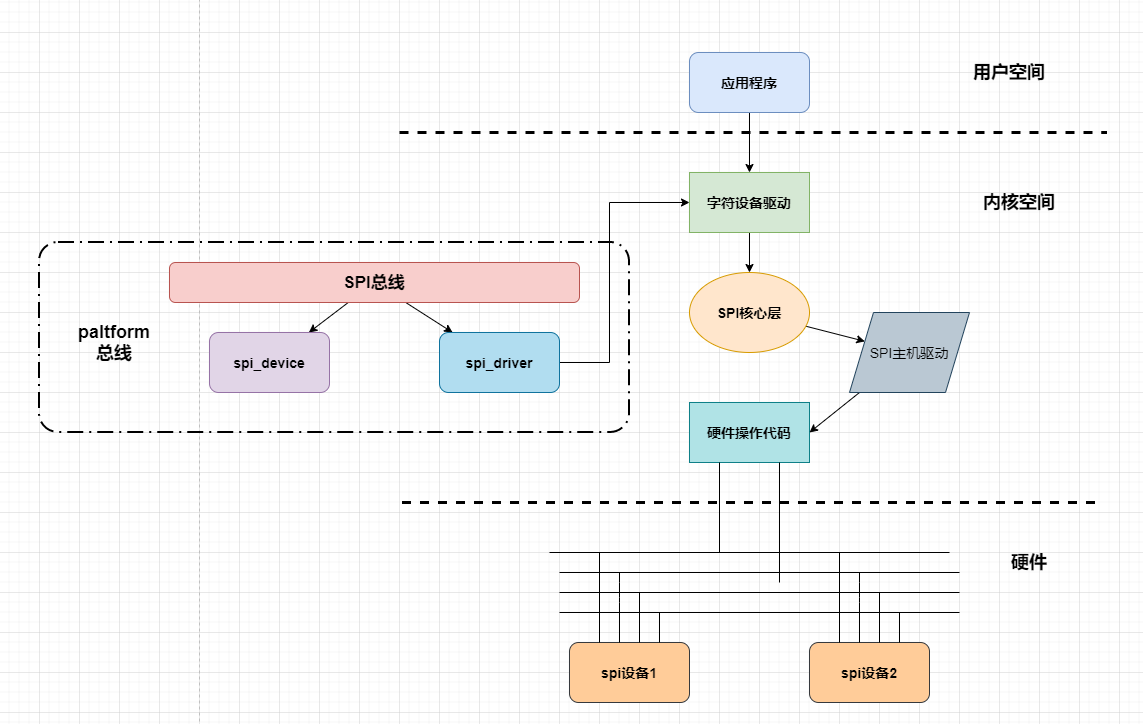
如框架图所示,ecspi可分为spi总线驱动和spi设备驱动。spi总线驱动已经由芯片厂商提供,我们适当了解其实现机制。 而spi设备驱动由我们自己编写,则需要明白其中的原理。spi设备驱动涉及到字符设备驱动、SPI核心层、SPI主机驱动,具体功能如下。
SPI核心层:提供SPI控制器驱动和设备驱动的注册方法、注销方法、SPI通信硬件无关接口函数。
SPI主机驱动:主要包含SPI硬件体系结构中适配器(spi控制器)的控制,用于产生SPI 读写时序。
SPI设备驱动:通过SPI主机驱动与CPU交换数据。
13.2.1. 关键数据结构¶
这里对整个ecspi驱动框架所涉及的关键数据结构进行整理,可先跳过,后续代码中遇到这些数据结构时再回来看详细定义。
13.2.1.1. spi_master¶
spi_master会在SPI主机驱动中使用到。 spi_controller实际是一个宏,指向spi_controller结构体。
13.2.1.2. spi_controller¶
部分成员变量已经被省略,下面是spi_controller关键成员变量:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | struct spi_controller {
struct device dev;
...
struct list_head list;
s16 bus_num;
u16 num_chipselect;
...
struct spi_message *cur_msg;
...
int (*setup)(struct spi_device *spi);
int (*transfer)(struct spi_device *spi,
struct spi_message *mesg);
void (*cleanup)(struct spi_device *spi);
struct kthread_worker kworker;
struct task_struct *kworker_task;
struct kthread_work pump_messages;
struct list_head queue;
struct spi_message *cur_msg;
...
int (*transfer_one)(struct spi_controller *ctlr, struct spi_device *spi,struct spi_transfer *transfer);
int (*prepare_transfer_hardware)(struct spi_controller *ctlr);
int (*transfer_one_message)(struct spi_controller *ctlr,struct spi_message *mesg);
void (*set_cs)(struct spi_device *spi, bool enable);
...
int *cs_gpios;
}
|
spi_controller中包含了各种函数指针,这些函数指针会在SPI核心层中被使用。
list: 链表节点,芯片可能有多个spi控制器
bus_num: spi控制器编号
num_chipselect: spi片选信号的个数,对不同的从设备进行区分
cur_msg: spi_message结构体类型,我们发送的信息都会被封装在这个结构体中。cur_msg,当前正带处理的消息队列
transfer: 用于把数据加入控制器的消息队列中
cleanup: 当spi_master被释放的时候,完成清理工作
kworker: 内核线程工人,spi可以使用异步传输方式发送数据
pump_messages: 具体传输工作
queue: 所有等待传输的消息队列挂在该链表下
transfer_one_message: 发送一个spi消息,类似IIC适配器里的algo->master_xfer,产生spi通信时序
cs_gpios: 记录spi上具体的片选信号。
13.2.1.3. spi_driver结构体¶
1 2 3 4 5 6 7 | struct spi_driver {
const struct spi_device_id *id_table;
int (*probe)(struct spi_device *spi);
int (*remove)(struct spi_device *spi);
void (*shutdown)(struct spi_device *spi);
struct device_driver driver;
};
|
id_table: 用来和spi进行配对。
.probe: spi设备和spi驱动匹配成功后,回调该函数指针
可以看到spi设备驱动结构体和我们之前讲过的i2c设备驱动结构体 i2c_driver 、平台设备驱动结构体 platform_driver 拥有相同的结构,用法也相同。
spi_device ‘’’’’’’’’’’’’’’’’设备结构体’’’’
在spi驱动中一个spi设备结构体代表了一个具体的spi设备,它保存着这个spi设备的详细信息,也可以说是配置信息。 当驱动和设备匹配成功后(例如设备树节点)我们可以从.prob函数的参数中得到spi_device结构体。
dev: device类型结构体。这是一个设备结构体,我们把它称为spi设备结构体、i2c设备结构体、平台设备结构体都是“继承”自设备结构体。它们根据各自的特点添加自己的成员,spi设备添加的成员就是后面要介绍的成员
controller: 当前spi设备挂载在那个spi控制器
master: spi_master类型的结构体。在总线驱动中,一个spi_master代表了一个spi总线,这个参数就是用于指定spi设备挂载到那个spi总线上
max_speed_hz: 指定SPI通信的最大频率
chip_select: spi总选用于区分不同SPI设备的一个标号,不要误以为他是SPI设备的片选引脚。指定片选引脚的成员在下面
bits_per_word: 指定SPI通信时一个字节多少位,也就是传输单位
mode: SPI工作模式,工作模式如以上代码中的宏定义。包括时钟极性、位宽等等,这些宏定义可以使用或运算“|”进行组合,这些宏定义在SPI协议中有详细介绍,这里不再赘述
irq: 如果使用了中断,它用于指定中断号
cs_gpio: 片选引脚。在设备树中设置了片选引脚,驱动和设别树节点匹配成功后自动获取片选引脚,我们也可以在驱动总通过设置该参数自定义片选引脚
statistics: 记录spi名字,用来和spi_driver进行配对。
13.2.1.4. spi_transfer结构体¶
在spi设备驱动程序中,spi_transfer结构体用于指定要发送的数据,后面称为 传输结构体 :
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | struct spi_transfer {
/* it's ok if tx_buf == rx_buf (right?)
* for MicroWire, one buffer must be null
* buffers must work with dma_*map_single() calls, unless
* spi_message.is_dma_mapped reports a pre-existing mapping
*/
const void *tx_buf;
void *rx_buf;
unsigned len;
dma_addr_t tx_dma;
dma_addr_t rx_dma;
struct sg_table tx_sg;
struct sg_table rx_sg;
unsigned cs_change:1;
unsigned tx_nbits:3;
unsigned rx_nbits:3;
#define SPI_NBITS_SINGLE 0x01 /* 1bit transfer */
#define SPI_NBITS_DUAL 0x02 /* 2bits transfer */
#define SPI_NBITS_QUAD 0x04 /* 4bits transfer */
u8 bits_per_word;
u16 delay_usecs;
u32 speed_hz;
struct list_head transfer_list;
};
|
传输结构体的成员较多,需要我们自己设置的很少,这里只介绍我们常用的配置项。
tx_buf: 发送缓冲区,用于指定要发送的数据地址。
rx_buf: 接收缓冲区,用于保存接收得到的数据,如果不接收不用设置或设置为NULL.
len: 要发送和接收的长度,根据SPI特性发送、接收长度相等。
tx_dma、rx_dma: 如果使用了DAM,用于指定tx或rx DMA地址。
bits_per_word: speed_hz,分别用于设置每个字节多少位、发送频率。如果我们不设置这些参数那么会使用默认的配置,也就是我初始化spi是设置的参数。
13.2.1.5. spi_message结构体¶
总的来说spi_transfer结构体保存了要发送(或接收)的数据,而在SPI设备驱动中数据是以“消息”的形式发送。 spi_message是消息结构体,我们把它称为消息结构体,发送一个消息分四步, 依次为定义消息结构体、初始化消息结构体、“绑定”要发送的数据(也就是初始化好的spi_transfer结构)、执行发送。
spi_message结构体定义如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 | struct spi_message {
struct list_head transfers;
struct spi_device *spi;
unsigned is_dma_mapped:1;
/* REVISIT: we might want a flag affecting the behavior of the
* last transfer ... allowing things like "read 16 bit length L"
* immediately followed by "read L bytes". Basically imposing
* a specific message scheduling algorithm.
*
* Some controller drivers (message-at-a-time queue processing)
* could provide that as their default scheduling algorithm. But
* others (with multi-message pipelines) could need a flag to
* tell them about such special cases.
*/
/* completion is reported through a callback */
void (*complete)(void *context);
void *context;
unsigned frame_length;
unsigned actual_length;
int status;
/* for optional use by whatever driver currently owns the
* spi_message ... between calls to spi_async and then later
* complete(), that's the spi_master controller driver.
*/
struct list_head queue;
void *state;
};
|
spi_message结构体成员我们比较陌生,如果我们不考虑具体的发送细节我们可以不用了解这些成员的含义,因为spi_message的初始化以及“绑定”spi_transfer传输结构体都是由内核函数实现。 唯一要说明的是第二个成员“spi”,它是一个spi_device类型的指针,我们讲解spi_device结构体时说过,一个spi设备对应一个spi_device结构体,这个成员就是用于指定消息来自哪个设备。
13.3. ecspi总线驱动¶
13.3.1. SPI核心层¶
13.3.1.1. spi 总线注册¶
linux系统在开机的时候就会执行,自动进行spi总线注册。
1 2 3 4 5 6 7 8 9 | static int __init spi_init(void)
{
int status;
...
status = bus_register(&spi_bus_type);
...
status = class_register(&spi_master_class);
...
}
|
当总线注册成功之后,会在sys/bus下面生成一个spi总线,然后在系统中新增一个设备类,sys/class/目录下会可以找到spi_master类。
13.3.1.2. spi总线定义¶
spi_bus_type 总线定义,会在spi总线注册时使用。
1 2 3 4 5 6 | struct bus_type spi_bus_type = {
.name = "spi",
.dev_groups = spi_dev_groups,
.match = spi_match_device,
.uevent = spi_uevent,
};
|
.match函数指针,设定了spi设备和spi驱动的匹配规则,具体如下spi_match_device。
13.3.1.3. spi_match_device()函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | static int spi_match_device(struct device *dev, struct device_driver *drv)
{
const struct spi_device *spi = to_spi_device(dev);
const struct spi_driver *sdrv = to_spi_driver(drv);
/* Attempt an OF style match */
if (of_driver_match_device(dev, drv))
return 1;
/* Then try ACPI */
if (acpi_driver_match_device(dev, drv))
return 1;
if (sdrv->id_table)
return !!spi_match_id(sdrv->id_table, spi);
return strcmp(spi->modalias, drv->name) == 0;
}
|
函数提供了四种匹配方式,设备树匹配方式和acpi匹配方式以及id_table匹配方式,如果前面三种都没有匹配成功,则通过设备名进行配对。
13.3.2. spi控制器驱动¶
我们使用的IMX6ull芯片有4个spi控制器,对应的设备树存在4个节点
1 2 3 4 5 6 7 8 9 10 11 12 13 | ecspi3: ecspi@2010000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "fsl,imx6ul-ecspi", "fsl,imx51-ecspi";
reg = <0x2010000 0x4000>;
interrupts = <GIC_SPI 33 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_ECSPI3>,
<&clks IMX6UL_CLK_ECSPI3>;
clock-names = "ipg", "per";
dmas = <&sdma 7 7 1>, <&sdma 8 7 2>;
dma-names = "rx", "tx";
status = "disabled";
};
|
reg为spi3寄存器组相关的起始地址为0x2010000,寄存器长度为0x4000。其他属性暂时不需要了解。
module_platform_driver()宏
1 2 3 | #define module_platform_driver(__platform_driver) \
module_driver(__platform_driver, platform_driver_register, \
platform_driver_unregister)
|
module_driver()展开如下:
1 2 3 4 5 6 | #define module_driver(__driver, __register, __unregister, ...) \
static int __init __driver##_init(void) \
{ \
return __register(&(__driver) , ##__VA_ARGS__); \
} \
module_init(__driver##_init); \
|
__driver:即为module_platform_driver()宏中的__platform_driver,也就是spi_imx_driver。
__register:platform_driver_register
__unregister:platform_driver_unregister
##__VA_ARGS__:可变参数
module_platform_driver用于注册平台设备,我们向函数传入platform_driver结构体类型的spi_imx_driver结构体变量,
module_platform_driver(spi_imx_driver)
1 2 3 4 5 | static int __init spi_imx_driver_init(void) \
{ \
return platform_driver_register(&(spi_imx_driver) , ##__VA_ARGS__); \
} \
module_init(spi_imx_driver_init); \
|
13.3.2.1. spi_imx_probe()函数¶
spi_imx_probe()函数主要有如下功能: 获取设备树节点信息,初始化spi时钟、dma、中断等, 保存spi寄存器起始地址,填充spi控制器回调函数。
代码如下(部分被省略):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 | static int spi_imx_probe(struct platform_device *pdev)
{
struct device_node *np = pdev->dev.of_node;
const struct of_device_id *of_id =
of_match_device(spi_imx_dt_ids, &pdev->dev);
struct spi_imx_master *mxc_platform_info =
dev_get_platdata(&pdev->dev);
struct spi_master *master;
struct spi_imx_data *spi_imx;
struct resource *res;
const struct spi_imx_devtype_data *devtype_data = of_id ? of_id->data :
(struct spi_imx_devtype_data *)pdev->id_entry->driver_data;
bool slave_mode;
...
slave_mode = devtype_data->has_slavemode &&
of_property_read_bool(np, "spi-slave");
if (slave_mode)
master = spi_alloc_slave(&pdev->dev,
sizeof(struct spi_imx_data));
else
master = spi_alloc_master(&pdev->dev,
sizeof(struct spi_imx_data));
if (!master)
return -ENOMEM;
...
ret = of_property_read_u32(np, "fsl,spi-num-chipselects", &num_cs);
if (ret < 0) {
if (mxc_platform_info) {
num_cs = mxc_platform_info->num_chipselect;
master->num_chipselect = num_cs;
}
} else {
master->num_chipselect = num_cs;
}
spi_imx = spi_master_get_devdata(master);
spi_imx->bitbang.master = master;
spi_imx->dev = &pdev->dev;
spi_imx->slave_mode = slave_mode;
spi_imx->devtype_data = devtype_data;
master->cs_gpios = devm_kzalloc(&master->dev,
sizeof(int) * master->num_chipselect, GFP_KERNEL);
spi_imx->bitbang.chipselect = spi_imx_chipselect;
spi_imx->bitbang.setup_transfer = spi_imx_setupxfer;
spi_imx->bitbang.txrx_bufs = spi_imx_transfer;
spi_imx->bitbang.master->setup = spi_imx_setup;
spi_imx->bitbang.master->cleanup = spi_imx_cleanup;
spi_imx->bitbang.master->prepare_message = spi_imx_prepare_message;
spi_imx->bitbang.master->unprepare_message = spi_imx_unprepare_message;
spi_imx->bitbang.master->slave_abort = spi_imx_slave_abort;
spi_imx->bitbang.master->mode_bits = SPI_CPOL | SPI_CPHA | SPI_CS_HIGH \
...
init_completion(&spi_imx->xfer_done);
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
spi_imx->base = devm_ioremap_resource(&pdev->dev, res);
...
ret = spi_bitbang_start(&spi_imx->bitbang);
...
}
|
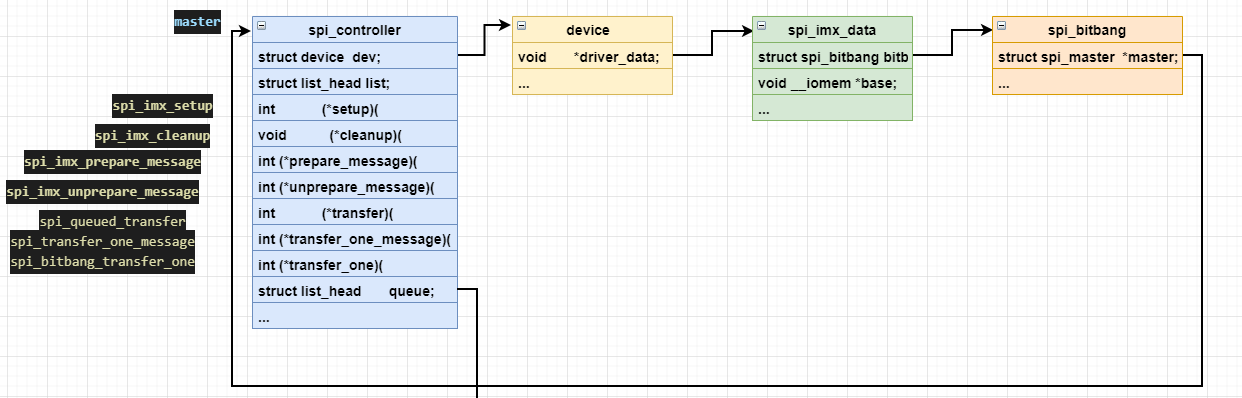
第2-13行: 声明一些必要的变量,这些结构体的关系如上所示。
第16行: of_property_read_bool()去设备树节点读取指定的值保存在slave_mode中,spi-slave的值指定spi是工作在主模式还是从模式下面。
第17-24行: 根据slave_mode的值为master分配内存。
第26-34行:读取spi片选数量,保存在num_cs中,然后将值赋给master。使用时,就可以通过spi_controller获取片选信号。
第37行:将spi_bitbang结构体指向spi控制器,spi_bitbang的作用就是让我们使用普通GPIO来模拟spi时序。由于我们不使用普通GPIO模拟spi,这部分就不深入讲解
第38-41行: 对spi_imx其他成员进行初始化。
第43行: 对master中的cs_gpios动态申请内存。用来存放spi控制器所使用的引脚。
第46-54行: 为spi_bitbang设置了一系列的回调函数,这里重要的有spi_imx_setup、spi_imx_cleanup、spi_imx_prepare_message、spi_imx_unprepare_message,后面会一一介绍。
第58、59行: 获取设备树spi控制器的基地址,并进行虚拟地址映射,存放现在spi_imx结构体变量中的base成员中。
第61行: 接下来调用spi_bitbang_start函数传入bitbang指针,下面是spi_bitbang_start函数。
13.3.2.2. spi_bitbang_start()函数¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 | int spi_bitbang_start(struct spi_bitbang *bitbang)
{
struct spi_master *master = bitbang->master;
int ret;
if (!master || !bitbang->chipselect)
return -EINVAL;
mutex_init(&bitbang->lock);
if (!master->mode_bits)
master->mode_bits = SPI_CPOL | SPI_CPHA | bitbang->flags;
if (master->transfer || master->transfer_one_message)
return -EINVAL;
master->prepare_transfer_hardware = spi_bitbang_prepare_hardware;
master->unprepare_transfer_hardware = spi_bitbang_unprepare_hardware;
master->transfer_one = spi_bitbang_transfer_one;
master->set_cs = spi_bitbang_set_cs;
if (!bitbang->txrx_bufs) {
bitbang->use_dma = 0;
bitbang->txrx_bufs = spi_bitbang_bufs;
if (!master->setup) {
if (!bitbang->setup_transfer)
bitbang->setup_transfer =
spi_bitbang_setup_transfer;
master->setup = spi_bitbang_setup;
master->cleanup = spi_bitbang_cleanup;
}
}
/* driver may get busy before register() returns, especially
* if someone registered boardinfo for devices
*/
ret = spi_register_master(spi_master_get(master));
if (ret)
spi_master_put(master);
return ret;
}
EXPORT_SYMBOL_GPL(spi_bitbang_start);
|
第6-15行: 对传入的bitbang结构体成员进行判断。
第17-20行: 对master的回调函数进行填充。
第37行: 调用spi_register_master将master注册进linux。
13.4. ecspi设备驱动¶
ecspi总线驱动,由硬件供应商提供,我们只需要了解,学习其原理就行。 下面涉及的函数,我们将会在ecspi设备驱动中使用。
13.4.1. 核心函数¶
ecspi设备的注册和注销函数分别在驱动的入口和出口函数中调用,这与平台设备驱动、i2c设备驱动相同,
ecspi设备注册和注销函数如下:
1 2 | int spi_register_driver(struct spi_driver *sdrv)
static inline void spi_unregister_driver(struct spi_driver *sdrv)
|
对比i2c设备的注册和注销函数,不难发现把“spi”换成“i2c”就是i2c设备的注册和注销函数了,并且用法相同。
参数:
spi spi_driver类型的结构体(spi设备驱动结构体),一个spi_driver结构体就代表了一个ecspi设备驱动
返回值:
成功: 0
失败: 其他任何值都为错误码
13.4.1.1. spi_setup()函数¶
函数设置spi设备的片选信号、传输单位、最大传输速率等,函数中调用spi控制器的成员controller->setup(), 也就是spi_imx->bitbang.master->setup(),在函数spi_imx_probe()中我们将spi_imx_setup赋予该结构体。
1 | int spi_setup(struct spi_device *spi)
|
参数:
spi spi_device spi设备结构体
返回值:
成功: 0
失败: 其他任何值都为错误码
13.4.2. ecspi同步与互斥¶
在spi_controller中有一个函数指针transfer_one, 回头去看spi_bitbang_start()函数,其中spi_bitbang_transfer_one就是来初始化该函数指针的;
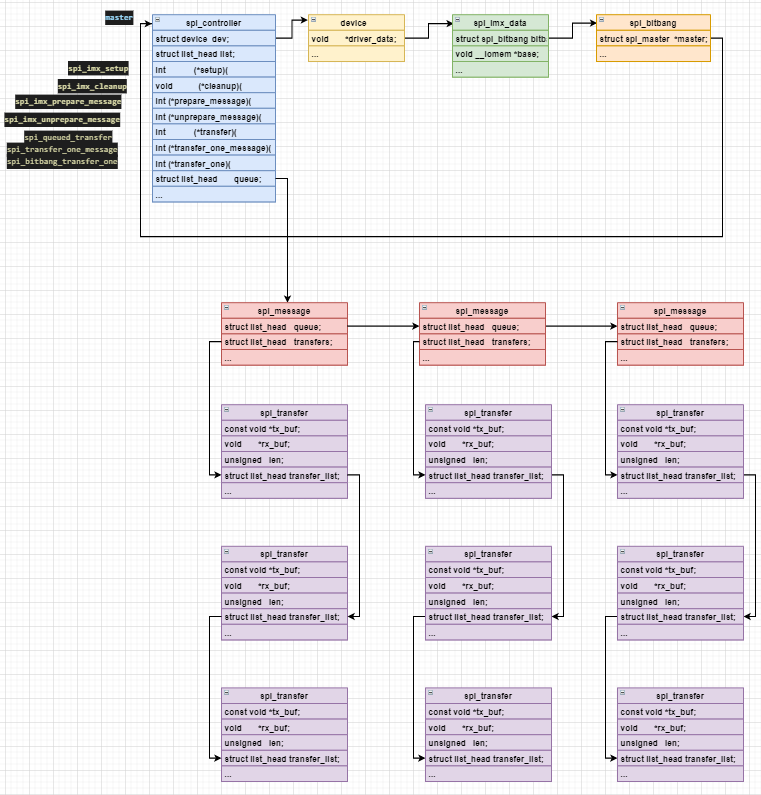
spi_message通过成员变量queue将一系列的spi_message串联起来,第一个spi_message挂在struct list_head queue下面 spi_message还有struct list_head transfers成员变量,transfer也是被串联起来的,如下图所示。
13.4.2.1. SPI同步传输数据¶
阻塞当前线程进行数据传输,spi_sync()内部调用__spi_sync()函数,mutex_lock()和mutex_unlock()为互斥锁的加锁和解锁。
1 2 3 4 5 6 7 8 9 10 | int spi_sync(struct spi_device *spi, struct spi_message *message)
{
int ret;
mutex_lock(&spi->controller->bus_lock_mutex);
ret = __spi_sync(spi, message);
mutex_unlock(&spi->controller->bus_lock_mutex);
return ret;
}
|
__spi_sync()函数实现如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 | static int __spi_sync(struct spi_device *spi, struct spi_message *message)
{
int status;
struct spi_controller *ctlr = spi->controller;
unsigned long flags;
status = __spi_validate(spi, message);
if (status != 0)
return status;
message->complete = spi_complete;
message->context = &done;
message->spi = spi;
...
if (ctlr->transfer == spi_queued_transfer) {
spin_lock_irqsave(&ctlr->bus_lock_spinlock, flags);
trace_spi_message_submit(message);
status = __spi_queued_transfer(spi, message, false);
spin_unlock_irqrestore(&ctlr->bus_lock_spinlock, flags);
} else {
status = spi_async_locked(spi, message);
}
if (status == 0) {
...
wait_for_completion(&done);
status = message->status;
}
message->context = NULL;
return status;
}
|
第7-9行: 函数内部首先调用__spi_validate对spi各个通信参数进行校验
第11-13行: 对message结构体进行初始化,其中第11行,当消息发送完毕后,spi_complete回调函数将被执行。
第30行: 阻塞当前线程,当message发送完成时结束阻塞。
13.4.2.2. SPI异步传输数据¶
1 2 3 4 5 6 | int spi_async(struct spi_device *spi, struct spi_message *message)
{
...
ret = __spi_async(spi, message);
...
}
|
在驱动程序中调用async时不会阻塞当前进程,只是把当前message结构体添加到当前spi控制器成员queue的末尾。 然后在内核中新增加一个工作,这个工作的内容就是去处理这个message结构体。
1 2 3 4 5 6 | static int __spi_async(struct spi_device *spi, struct spi_message *message)
{
struct spi_controller *ctlr = spi->controller;
...
return ctlr->transfer(spi, message);
}
|
13.5. oled屏幕驱动实验¶
ecspi_oled驱动和我们上一节介绍的i2c_mpu6050设备驱动非常相似,可对比学习,推荐先学习i2c_mpu6050驱动,因为这里会省略一部分在i2c_mpu6050绍过的内容。
本章配套源码和设备树插件位于base_code/linux_driver/ecSPI_OLED。
13.5.1. 硬件介绍¶
在oled驱动中我们使用ecspi1,可以通过IMX6ul的芯片手册查到,ecspi使用到的引脚如下。
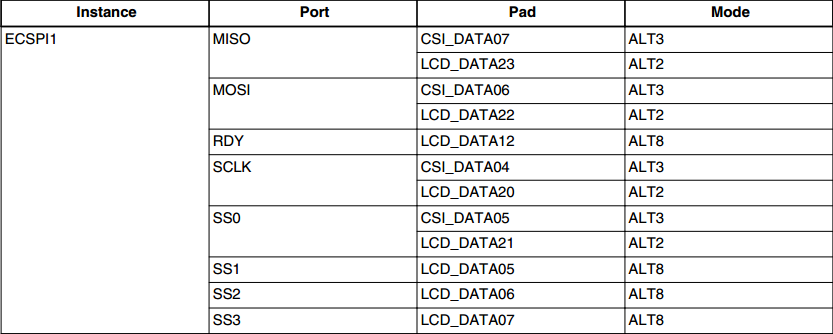
在我们实验中ecspi1使用CSI_DATA04-CSI_DATA07,oled屏和ecspi引脚对应入下。
SPI_OLED显示屏 |
功能 |
说明 |
引脚引出位置(排针) |
|---|---|---|---|
MOSI |
ECSPI1_MOSI |
MOSI引脚 |
CN5排针 IO4.25 脚 |
未使用 |
ECSPI1_ MISO |
MISO引脚 |
CN5排针 IO4.28 脚 |
CLK |
ECSPI1_SCLK |
ECSPI时钟引脚 |
CN5排针 IO4.27 脚 |
D/C |
GPIO4_IO24 |
数据、命令控制引脚 |
CN5排针 IO4.24脚 |
CS |
ECSPI1_SS0 |
片选引脚 |
CN5排针 IO4.26脚 |
GND |
电源- |
GND |
|
VCC |
电源+ |
3.3V |
设备树插件书写格式不变,我们重点讲解ecspi_oled设备节点。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 | /dts-v1/;
/plugin/;
#include "imx6ul-pinfunc.h"
/{
fragment@0 {
target = <&ecspi1>;
__overlay__ {
fsl,spi-num-chipselects = <1>; ------①
cs-gpios = <&gpio4 26 0>; -------②
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_ecspi1>; ------③
status = "okay";
ecspi_oled@0 {
d_c_control_pin = <&gpio4 24 0>; ------①
compatible = "fire,ecspi_oled";
spi-max-frequency = <20000000>; -------②
reg = <0>; -------③
};
};
};
fragment@1 {
target = <&iomuxc>;
__overlay__ {
pinctrl_ecspi1: ecspi1grp {
fsl,pins = <
MX6UL_PAD_CSI_DATA07__ECSPI1_MISO 0x10b0
MX6UL_PAD_CSI_DATA06__ECSPI1_MOSI 0x10b0
MX6UL_PAD_CSI_DATA04__ECSPI1_SCLK 0x10b0
MX6UL_PAD_CSI_DATA05__ECSPI1_SS0 0x10b0
MX6UL_PAD_CSI_DATA03__GPIO4_IO24 0x10b0
>;
};
};
};
};
|
第7行: 向ecspi1节点追加内容
第9行: 指定设备的数量,当前只有一个ecspi_oled,设置为1。
第10行: 指定使用的片选引脚,我们这里使用的是CS1既GPIO4_26。
第12行: 指定ecspi1使用的pinctrl节点,也就是说指定ecspi1要使用的引脚。
第15行: 向ecspi1节点追加ecspi_oled子节点
第16行: 指定ecspi_oled使用的D/C控制引脚,在驱动程序中会控制该引脚设置发送的是命令还是数据。
第18行: 设置SPI传输的最大频率,
第19行: 设置reg属性为0,表示ecspi_oled连接到ecspi的通道0
第25行: 向pinctrl子系统节点追加ecspi_oled使用到的引脚。
向pinctrl子系统添加引脚具体内容可参考 GPIO子系统章节 。这里使用了5个引脚它们与ecspi_oled显示屏引脚对应关系、引脚的功能、以及在开发板上的位置如上表所示。 需要注意的是ecspi_oled显示屏没有MISO引脚,直接空出即可,ecspi_oled显示屏需要一个额外的引脚连接D/C, 用于控制spi发送的是数据还是控制命令(高电平是数据,低电平是控制命令)。
13.5.2. 实验代码讲解¶
ecspi_oled驱动使用设备树插件方式开发,主要工作包三部分内容。
第一,编写ecspi_oled的设备树插件(硬件部分已介绍),
第二,编写ecspi_oled驱动程序,包含驱动的入口、出口函数实现,.prob函数实现,file_operations函数集实现。
第三,编写简单测试应用程序。
ecspi_oled的驱动结构和上一章的i2c_mpu6050完全相同。这里不再赘述,直接讲解实现代码。如下所示。
13.5.2.1. 驱动的入口和出口函数实现¶
驱动入口和出口函数与I2C_mpu6050驱动相似,只是把i2c替换为ecspi,源码如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 | /*指定 ID 匹配表*/
static const struct spi_device_id oled_device_id[] = {
{"fire,ecspi_oled", 0},
{}};
/*指定设备树匹配表*/
static const struct of_device_id oled_of_match_table[] = {
{.compatible = "fire,ecspi_oled"},
{}};
/*spi总线设备结构体*/
struct spi_driver oled_driver = {
.probe = oled_probe,
.remove = oled_remove,
.id_table = oled_device_id,
.driver = {
.name = "ecspi_oled",
.owner = THIS_MODULE,
.of_match_table = oled_of_match_table,
},
};
/*
*驱动初始化函数
*/
static int __init oled_driver_init(void)
{
int error;
pr_info("oled_driver_init\n");
error = spi_register_driver(&oled_driver);
return error;
}
/*
*驱动注销函数
*/
static void __exit oled_driver_exit(void)
{
pr_info("oled_driver_exit\n");
spi_unregister_driver(&oled_driver);
}
|
第2-9行: 这里定义了两个匹配表,第一个是传统的匹配表(可省略)。第二个是和设备树节点匹配的匹配表,保证与设备树节点.compatible属性设定值相同即可。
第12-21行: 定义spi_driver类型结构体。该结构体可类比i2c_driver和platform_driver。
第26-41行: 驱动的入口和出口函数,在入口函数只需要注册一个spi驱动,在出口函数中注销它
13.5.2.2. .prob函数实现¶
在.prob函数中完成两个主要工作,第一,初始化ecspi,第二,申请一个字符设备。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 | static int oled_probe(struct spi_device *spi)
{
printk(KERN_EMERG "\t match successed \n");
/*获取 ecspi_oled 设备树节点*/
oled_device_node = of_find_node_by_path("/soc/aips-bus@2000000/spba-bus@2000000/ecspi@2008000/ecspi_oled@0");
if (oled_device_node == NULL)
{
printk(KERN_EMERG "\t get ecspi_oled@0 failed! \n");
}
/*获取 oled 的 D/C 控制引脚并设置为输出,默认高电平*/
oled_control_pin_number = of_get_named_gpio(oled_device_node, "d_c_control_pin", 0);
gpio_direction_output(oled_control_pin_number, 1);
/*初始化spi*/
oled_spi_device = spi; ----①
oled_spi_device->mode = SPI_MODE_0; ---②
oled_spi_device->max_speed_hz = 2000000; ---③
spi_setup(oled_spi_device);
/*注册字符设备*/
ret = alloc_chrdev_region(&oled_devno, 0, DEV_CNT, DEV_NAME);
if (ret < 0)
{
printk("fail to alloc oled_devno\n");
goto alloc_err;
}
/*关联字符设备结构体cdev与文件操作结构体file_operations*/
oled_chr_dev.owner = THIS_MODULE;
cdev_init(&oled_chr_dev, &oled_chr_dev_fops);
/*添加设备至cdev_map散列表中*/
ret = cdev_add(&oled_chr_dev, oled_devno, DEV_CNT);
if (ret < 0)
{
printk("fail to add cdev\n");
goto add_err;
}
/*创建类*/
class_oled = class_create(THIS_MODULE, DEV_NAME);
/*创建设备 DEV_NAME 指定设备*/
device_oled = device_create(class_oled, NULL, oled_devno, NULL, DEV_NAME);
...
return 0;
}
|
.prob函数介绍如下:
第6-10行: 根据设备树节点路径获取节点。
第13-14行: 获取ecspi_oled的D/C控制引脚。并设置为高电平。
第17行: .prob函数传回的spi_device结构体,根据之前讲解,该结构体代表了一个ecspi(spi)设备,我们通过它配置SPI,这里设置的内容将会覆盖设备树节点中设置的内容。
第18行: 设置SPI模式为SPI_MODE_0。
第19行: 设置最高频率为2000000,设备树中也设置了该属性,则这里设置的频率为最终值。
第23-46行:注册字符设备、创建设备。
13.5.2.3. 字符设备操作函数集实现¶
字符设备操作函数集是驱动对外的接口,我们要在这些函数中实现对ecspi_oled的初始化、写入、关闭等等工作。 这里共实现三个函数,.open函数用于实现ecspi_oled的初始化,.write函数用于向ecspi_oled写入显示数据,.release函数用于关闭ecspi_oled。
.open函数实现
在open函数中完成ecspi_oled的初始化,代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 | /*字符设备操作函数集,open函数实现*/
static int oled_open(struct inode *inode, struct file *filp)
{
spi_oled_init(); //初始化显示屏
return 0;
}
/*oled 初始化函数*/
void spi_oled_init(void)
{
/*初始化oled*/
oled_send_commands(oled_spi_device, oled_init_data, sizeof(oled_init_data));
/*清屏*/
oled_fill(0x00);
}
static int oled_send_commands(struct spi_device *spi_device, u8 *commands, u16 lenght)
{
int error = 0;
struct spi_message *message; //定义发送的消息
struct spi_transfer *transfer; //定义传输结构体
/*申请空间*/
message = kzalloc(sizeof(struct spi_message), GFP_KERNEL);
transfer = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);
/*设置 D/C引脚为低电平*/
gpio_direction_output(oled_control_pin_number, 0);
/*填充message和transfer结构体*/
transfer->tx_buf = commands;
transfer->len = lenght;
spi_message_init(message);
spi_message_add_tail(transfer, message);
error = spi_sync(spi_device, message);
kfree(message);
kfree(transfer);
if (error != 0)
{
printk("spi_sync error! \n");
return -1;
}
return error;
}
|
如上代码所示,open函数只调用了自定义spi_oled_init函数,在spi_oled_init函数函数中调用oled_send_commands函数初始化ecspi_oled,然后调用清屏函数。 这里主要讲解oled_send_commands函数:
第21、22行: 定义spi_message结构体和spi_transfer结构体。
第25、26行: 为节省内核栈空间这里使用kzalloc为它们分配空间,这两个结构体大约占用100字节,推荐这样做。
第28行: 设置 D/C引脚为低电平,前面说过,ecspi_oled的D/C引脚用于控制发送的命令或数据,低电平时表示发送的是命令。
第30-34行: 这里就是我们之前讲解的发送流程依次为初始化spi_transfer结构体指定要发送的数据、初始化消息结构体、将消息结构体添加到队尾部、调用spi_sync函数执行同步发送。。
第36-43行: 释放空间。
.write函数实现
.write函数用于接收来自应用程序的数据,并显示这些数据。函数实现如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | /*字符设备操作函数集,.write函数实现*/
static int oled_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *off)
{
int copy_number=0;
/*申请内存*/
oled_display_struct *write_data;
write_data = (oled_display_struct*)kzalloc(cnt, GFP_KERNEL);
copy_number = copy_from_user(write_data, buf,cnt);
oled_display_buffer(write_data->display_buffer, write_data->x, write_data->y, write_data->length);
/*释放内存*/
kfree(write_data);
return 0;
}
static int oled_display_buffer(u8 *display_buffer, u8 x, u8 y, u16 length)
/*数据发送结构体*/
typedef struct oled_display_struct
{
u8 x;
u8 y;
u32 length;
u8 display_buffer[];
}oled_display_struct;
|
代码介绍如下:
第2行: .write函数,我们重点关注两个参数buf保存来自应用程序的数据地址,我们需要把这些数据拷贝到内核空间才能使用,参数cnt指定数据长度。
第6行: 定义oled_display_struct结构体并保存来自用户空间的数据。
第7-8行: 使用kzalloc为oled_display_struct结构体分配空间,因为在应用程序中使用相同的结构体,所以这里直接根据参数“cnt”分配空间,分配成功后执行“copy_from_user”即可。
第9行: 调用自定义函数oled_display_buffer显示数据。
第11行: 释放空间
第15行: 函数原型如第四部分所示,参数display_buffer指定要显示的点阵数据x、y用于指定显示起始位置,length指定显示长度。具体函数实现也很简单,这里不再赘述。
第25行: oled_display_struct结构体是自定义的一个结构体。它是一个可变长度结构体,参数 x 、y用于指定数据显示位置,参数length指定数据长度,柔性数组display_buffer[]用于保存来自用户空间的显示数据。
.release函数实现
.release函数功能仅仅是向ecspi_oled显示屏发送关闭显示命令,源码如下:
1 2 3 4 5 6 | /*字符设备操作函数集,.release函数实现*/
static int oled_release(struct inode *inode, struct file *filp)
{
oled_send_command(oled_spi_device, 0xae);//关闭显示
return 0;
}
|
13.5.2.3.1. oled测试应用程序实现¶
测试应用程序主要工作是实现oled显示屏实现刷屏、显示文字、显示图片。
测试程序需要用到字符以及图片的点阵数据保存在oled_code_table.c文件,为方便管理我们编写了一个简单makefile文件方便我们编译程序。
makefile文件如下所示:
1 2 3 4 5 6 7 8 | out_file_name = "test_app"
all: test_app.c oled_code_table.c
arm-linux-gnueabihf-gcc $^ -o $(out_file_name)
.PHONY: clean
clean:
rm $(out_file_name)
|
Makefile很简单,就不加以说明。
下面是我们的测试程序源码。如下所示:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 | /*点阵数据*/
extern unsigned char F16x16[];
extern unsigned char F6x8[][6];
extern unsigned char F8x16[][16];
extern unsigned char BMP1[];
int main(int argc, char *argv[])
{
int error = -1;
/*打开文件*/
int fd = open("/dev/ecspi_oled", O_RDWR);
if (fd < 0)
{
printf("open file : %s failed !\n", argv[0]);
return -1;
}
/*显示图片*/
show_bmp(fd, 0, 0, BMP1, X_WIDTH*Y_WIDTH/8);
sleep(3);
/*显示文字*/
oled_fill(fd, 0, 0, 127, 7, 0x00); //清屏
oled_show_F16X16_letter(fd,0, 0, F16x16, 4); //显示汉字
oled_show_F8X16_string(fd,0,2,"F8X16:THIS IS ecSPI TEST APP");
oled_show_F6X8_string(fd, 0, 6,"F6X8:THIS IS ecSPI TEST APP");
sleep(3);
oled_fill(fd, 0, 0, 127, 7, 0x00); //清屏
oled_show_F8X16_string(fd,0,0,"Testing is completed");
sleep(3);
/*关闭文件*/
error = close(fd);
if(error < 0)
{
printf("close file error! \n");
}
return 0;
}
|
测试程序很简单,完整代码请参考配套例程,结合代码简单介绍如下: - 第2-5行: 测试程序要用到的点阵数据,我们显示图片、汉字之前都要把它们转化为点阵数据。这么转?,野火spi_oled模块配套资料提供有转换工具以及使用说明。 - 第11行: 打开ecspi_oled的设备节点,这个根据自己的驱动而定,我们使用的驱动源码就是这个路径。 - 第18行: 显示图片测试,这里需要说明的是由于测试程序不那么完善,图片显示起始位置x坐标应当设置为0,这样在循环显示时才不会乱。显示长度应当为显示屏的像素数除以8,因为每个字节8位,这8位控制8个像素点。 - 第22-25行: 测试显示汉字和不同规格的字符。 - 第28-33行: 显示测试结束提示语,之后关闭显示。
13.5.3. 实验准备¶
编译工具下载地址
将我们编写的设备树插件 base_code/linux_driver/ecSPI_OLED/imx-fire-ecspi-oled-overlay.dts 拷贝到 ebf-linux-dtoverlays/overlays/ebf/下,执行make。 在“ebf-linux-dtoverlays/output/”目录下,会生成imx-fire-ecspi-oled-overlay.dtbo。
imx-fire-ecspi-oled-overlay.dtbo就是oled屏的设备树插件
将 base_code/ecSPI_OLED/ 拷贝到内核源码同级目录,执行里面的MakeFile,生成ecspi_oled.ko。
将 base_code/ecSPI_OLED/test_app 目录中执行里面的MakeFile,生成test_app。

13.5.4. 程序运行结果¶
将前面生成的设备树插件、驱动程序、应用程序通过scp等方式拷贝到开发板。
将设备树插件拷贝到/lib/firmware/,在/boot/uEnv.txt中添加 dtoverlay=/lib/firmware/imx-fire-ecspi-oled-overlay.dtbo
加载驱动陈程序 insmod ecspi_oled.ko。驱动程序打印match successed、

驱动加载成功后直接运行测试应用程序 ./test_app,正常情况下显示屏会显示设定的内容,如下所示。