12. 链表¶
在LiteOS中存在着大量的基础数据结构链表(或者称之为列表List)的操作,要想读懂LiteOS的源码,就必须弄懂链表的基本操作,在列表中的成 员称之为节点(Node),在后续的讲解中,本书所说的链表就是列表。
12.1. C语言链表简介¶
链表作为C语言中一种基础的数据结构,在平时写程序的时候用的并不多,但在操作系统里面使用的非常多。链表就好比一个圆形的晾衣架,如 图 圆形晾衣架 所示,晾衣架上面有很多钩子,钩子首尾相连。链表也是如此,链表由节点组成,节点与节点之间首尾相连。
晾衣架的钩子不能代表很多东西,但是钩子本身却可以挂很多东西。同样,链表也类似,链表的节点本身不能存储太多东西,但是节点跟晾衣架的 钩子一样,可以挂载很多数据。
链表分为单向链表和双向链表,本书讲解的链表为双向链表。
双向链表也叫双链表,是链表的一种,是在操作系统中常用的数据结构,它的每个数据节点中都有两个指针,分别指向前驱节点和后继节点。因此, 从双向链表中的任意一个节点开始,都可以很方便地访问它的前驱节点和后继节点,这种数据结构形式使得双向链表在查找时更加方便,特别是大 量数据的遍历,能方便地完成各种插入、删除等操作。
在C语言中,链表与数组很类似,数组的特性是便于索引,而链表的特性是便于插入与删除,两者的示意图如图 链表与数组的对比 所示,本书以双向链表为例。
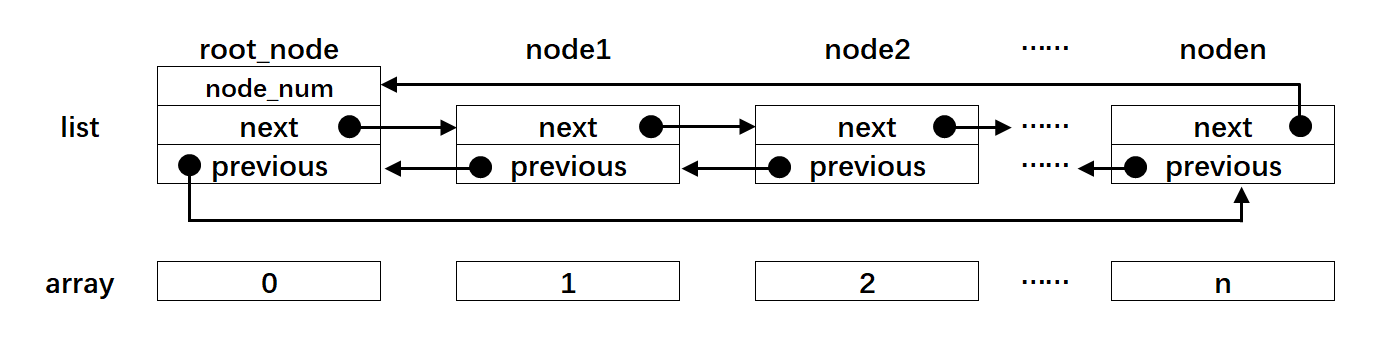
链表是通过节点把离散的数据链接成一个表,通过对节点的插入和删除操作从而实现对数据的存取。而数组是通过开辟一段连续的内存来存储数据, 这是数组和链表最大的区别。数组的每个成员对应链表的节点,成员和节点的数据类型可以是标准的C类型或者是用户自定义的结构体,数组有起始 地址和结束地址,而链表是一个圈。
12.2. 链表的使用讲解¶
LiteOS提供了很多操作链表的函数,如链表的初始化、添加节点、删除节点等。
LiteOS的链表节点结构体中只有两个指针,一个是指向前驱节点的指针,另一个是指向后继节点的指针,如 代码清单:链表-1 所示。
1 2 3 | typedef struct LOS_DL_LIST {
struct LOS_DL_LIST *pstPrev;
struct LOS_DL_LIST *pstNext;
|
12.2.1. 链表初始化函数LOS_ListInit()¶
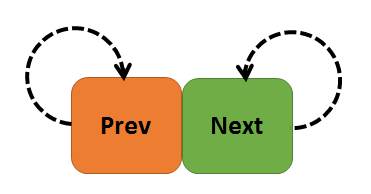
在使用链表的时候必须要先初始化,将链表的指针指向自己,为后续添加节点做准备 ,链表初始化函数LOS_ListInit()的源码如 代码清单:链表-2 所示,链表初始化示意图如图 链表初始化示意图 所示。
1 2 3 4 5 | LITE_OS_SEC_ALW_INLINE STATIC_INLINE VOID LOS_ListInit(LOS_DL_LIST *pstList)
{
pstList->pstNext = pstList;
pstList->pstPrev = pstList;
}
|
在初始化完成后可以检查一下链表初始化是否成功,判断链表是否为空,链表的初始化实例如 代码清单:链表-3 所示。
1 2 3 4 5 6 7 8 9 10 11 | LOS_DL_LIST *head; /* 定义一个双向链表的头节点 */
head = (LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, sizeof(LOS_DL_LIST));
/* 动态申请头节点的内存 */
LOS_ListInit(head); /* 初始化双向链表 */
if (!LOS_ListEmpty(head)) /* 判断是否初始化成功 */
{
printf("双向链表初始化失败!\n\n");
} else
{
printf("双向链表初始化成功!\n\n");
}
|
12.2.2. 向链表添加节点函数LOS_ListAdd()¶
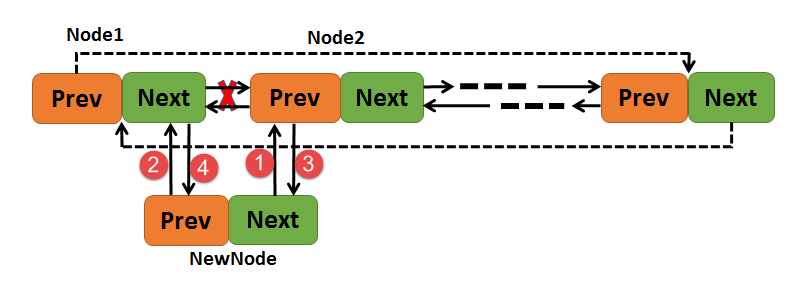
LiteOS运行向链表中插入节点,插入过程是需要选择插入链表的位置,再执行插入操作,如 代码清单:链表-4 所示(源码标注序号对应图片序号), 使用实例如 代码清单:链表-5 所示。
1 2 3 4 5 6 7 8 | LITE_OS_SEC_ALW_INLINE STATIC_INLINE VOID LOS_ListAdd(LOS_DL_LIST *pstList,
LOS_DL_LIST *pstNode)
{
pstNode->pstNext = pstList->pstNext; (1)
pstNode->pstPrev = pstList; (2)
pstList->pstNext->pstPrev = pstNode; (3)
pstList->pstNext = pstNode; (4)
}
|
插入节点的思想很简单,其过程如图 插入节点的过程示意图 所示(pstList 可以看作是Node1)。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 | printf("添加节点......\n");/* 插入节点*/
LOS_DL_LIST *node1 = /*动态申请第一个节点的内存 */
(LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, sizeof(LOS_DL_LIST));
LOS_DL_LIST *node2 = /*动态申请第二个节点的内存 */
(LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, sizeof(LOS_DL_LIST));
printf("添加第一个节点与第二个节点.....\n");
LOS_ListAdd(head,node1); /* 添加第一个节点,连接在头节点上 */
LOS_ListAdd(node1,node2); /* 添加第二个节点,连接在第一个节点上 */
if ((node1->pstPrev == head) && (node2->pstPrev == node1))
{/* 判断是否插入成功 */
printf("添加节点成功!\n\n");
} else
{
printf("添加节点失败!\n\n");
}
|
12.2.3. 从链表删除节点函数LOS_ListDelete()¶
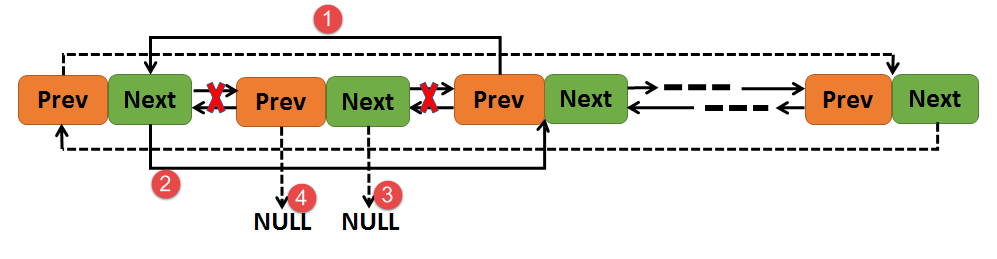
LiteOS支持删除链表中的节点,用户可以使用LOS_ListDelete()函数将节点删除,只需将要删除节点传递到函数中即可,该函数把该节 点的前驱节点与后继节点链接在一起,,然后将该节点的指针指向NULL就表示节点已删除,如 代码清单:链表-6 所示,其过程示意图如 图 节点删除过程示意图 所示(源码标注序号对应图片序号),LOS_ListDelete()函数使用实例如 代码清单:链表-7 所示。
1 2 3 4 5 6 7 | LITE_OS_SEC_ALW_INLINE STATIC_INLINE VOID LOS_ListDelete(LOS_DL_LIST *pstNode)
{
pstNode->pstNext->pstPrev = pstNode->pstPrev; (1)
pstNode->pstPrev->pstNext = pstNode->pstNext; (2)
pstNode->pstNext = (LOS_DL_LIST *)NULL; (3)
pstNode->pstPrev = (LOS_DL_LIST *)NULL; (4)
}
|
1 2 3 4 5 6 7 8 9 10 11 | printf("删除节点......\n");
LOS_ListDelete(node1); /* 删除第一个节点 */
LOS_MemFree(m_aucSysMem0, node1); /* 释放第一个节点的内存, */
if (head->pstNext == node2) /* 判断是否删除成功 */
{
printf("删除节点成功\n\n");
} else
{
printf("删除节点失败\n\n");
}
|
12.3. 双向链表实验¶
双向链表实验实现如下功能:
调用LOS_ListInit初始双向链表。
调用LOS_ListAdd向链表中增加节点。
调用LOS_ListTailInsert向链表尾部插入节点。
调用LOS_ListDelete删除指定节点。
调用LOS_ListEmpty判断链表是否为空。
测试操作是否成功。
实验源码如 代码清单:链表-8 高亮部分所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 | /**
***************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
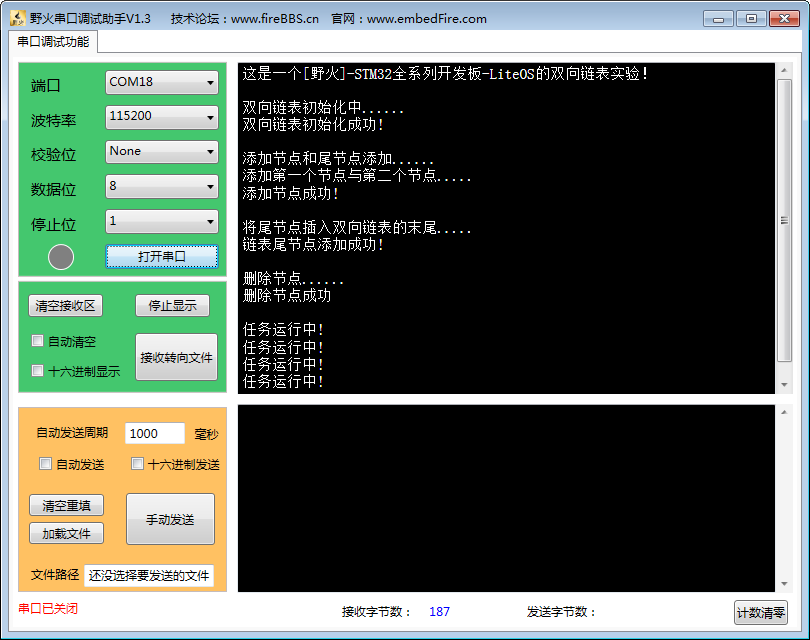
* @brief 这是一个[野火]-STM32F103霸道LiteOS的双向链表实验!
****************************************************************
* @attention
*
* 实验平台:野火 STM32 F103 开发板
* 论坛 :http://www.firebbs.cn
* 淘宝 :https://fire-stm32.taobao.com
*
***************************************************************
*/
/* LiteOS 头文件 */
#include "los_sys.h"
#include "los_typedef.h"
#include "los_task.ph"
#include "los_memory.h"
/* 板级外设头文件 */
#include "stm32f10x.h"
#include "bsp_usart.h"
#include "bsp_led.h"
#include "bsp_key.h"
/************************** 任务ID ********************************/
/*
* 任务ID是一个从0开始的数字,用于索引任务,当任务创建完成之后,它就具有了一个任务ID
* 以后读者要想操作这个任务都需要通过这个任务ID,
*
*/
/* 定义定时器ID变量 */
UINT32 Test_Task_Handle;
/* 函数声明 */
extern LITE_OS_SEC_BSS UINT8* m_aucSysMem0;
static void AppTaskCreate(void);
static UINT32 Creat_Test_Task(void);
static void Test_Task(void);
static void BSP_Init(void);
/**
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建App应用任务
第三步:启动LiteOS,开始多任务调度,启动不成功则输出错误信息
*/
int main(void)
{
UINT32 uwRet = LOS_OK;
/* 板级初始化,所有的跟开发板硬件相关的初始化都可以放在这个函数里面 */
BSP_Init();
/* 发送一个字符串 */
printf("这是一个[野火]-STM32全系列开发板- LiteOS的双向链表实验!\n");
/* LiteOS 核心初始化 */
uwRet = LOS_KernelInit();
if (uwRet != LOS_OK) {
printf("LiteOS 核心初始化失败!\n");
return LOS_NOK;
}
/* 创建App应用任务,所有的应用任务都可以放在这个函数里面 */
AppTaskCreate();
/* 开启LiteOS任务调度 */
LOS_Start();
}
static void AppTaskCreate(void)
{
UINT32 uwRet = LOS_OK;/* 定义一个创建任务的返回类型,初始化为创建成功的返回值 */
/* 创建Test_Task任务 */
uwRet = Creat_Test_Task();
if (uwRet != LOS_OK) {
printf("Test_Task任务创建失败!\n");
}
}
/* 创建Test_Task任务*/
static UINT32 Creat_Test_Task(void)
{
UINT32 uwRet = LOS_OK; /* 定义一个创建任务的返回类型,初始化为创建成功的返回值 */
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio = 4;/* 优先级,数值越小,优先级越高 */
task_init_param.pcName = "Test_Task";/* 任务名,字符串形式,方便调试 */
task_init_param.pfnTaskEntry = (TSK_ENTRY_FUNC)Test_Task;
task_init_param.uwStackSize = 0x1000;/* 栈大小,单位为字,即4个字节 */
uwRet = LOS_TaskCreate(&Test_Task_Handle, &task_init_param);
return uwRet;
}
/*******************************************************************
* @ 函数名 : Clear_Task
* @ 功能说明: 写入已经初始化成功的内存池地址数据
* @ 参数 : void
* @ 返回值 : 无
****************************************************************/
static void Test_Task(void)
{
UINT32 uwRet = LOS_OK; /* 定义一个初始化的返回类型,初始化为成功的返回值 */
printf("\n双向链表初始化中......\n");
LOS_DL_LIST *head; /* 定义一个双向链表的头节点 */
head = (LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, sizeof(LOS_DL_LIST));
/* 动态申请头节点的内存 */
LOS_ListInit(head); /* 初始化双向链表 */
if (!LOS_ListEmpty(head)) { /* 判断是否初始化成功 */
printf("双向链表初始化失败!\n\n");
} else {
printf("双向链表初始化成功!\n\n");
}
printf("添加节点和尾节点添加......\n");/* 插入节点:顺序插入与从末尾插入 */
LOS_DL_LIST *node1 = /*动态申请第一个节点的内存 */
(LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, sizeof(LOS_DL_LIST));
LOS_DL_LIST *node2 = /*动态申请第二个节点的内存 */
(LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, sizeof(LOS_DL_LIST));
LOS_DL_LIST *tail = /*动态申请尾节点的内存 */
(LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, sizeof(LOS_DL_LIST));
printf("添加第一个节点与第二个节点.....\n");
LOS_ListAdd(head,node1); /* 添加第一个节点,连接在头节点上 */
LOS_ListAdd(node1,node2); /* 添加第二个节点,连接在一个节点上 */
if ((node1->pstPrev == head) && (node2->pstPrev == node1)) {
printf("添加节点成功!\n\n"); /* 判断是否插入成功 */
} else {
printf("添加节点失败!\n\n");
}
printf("将尾节点插入双向链表的末尾.....\n");
LOS_ListTailInsert(head, tail); /* 将尾节点插入双向链表的末尾 */
if (tail->pstPrev == node2) {/* 判断是否插入成功 */
printf("链表尾节点添加成功!\n\n");
} else {
printf("链表尾节点添加失败!\n\n");
}
printf("删除节点......\n"); /* 删除已有节点 */
LOS_ListDelete(node1); /* 删除第一个节点 */
LOS_MemFree(m_aucSysMem0, node1); /* 释放第一个节点的内存, */
if (head->pstNext == node2) {/* 判断是否删除成功 */
printf("删除节点成功\n\n");
} else {
printf("删除节点失败\n\n");
}
while (1) {
LED2_TOGGLE; //LED2翻转
printf("任务运行中!\n");
LOS_TaskDelay (2000);
}
}
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/***************************END OF FILE**********************/
|