8. CAN总线通讯¶
在我们鲁班猫部分板卡上,带有CAN总线的收发器和接口。通过CAN总线的收发器和接口,我们可以使用鲁班猫板卡 通过CAN总线进行数据的传输。
重要
在做本节实验前,请确保您的鲁班猫板卡上有CAN总线的收发器和接口,才可进行本节实验。
如 鲁班猫I.MX6ULL MINI 板卡上就没有搭载CAN总线的收发器,不能做本节实验。
鲁班猫I.MX6ULL Pro 板则搭载CAN总线的收发器和接口,可做本节实验。
8.1. CAN总线通讯实验¶
对于我们的鲁班猫板卡而言,它具备了传统工业领域中的一些通讯接口及功能, 比如本节实验中会使用到的CAN总线。 因此在鲁班猫板卡上,我们可以通过其工业通讯接口与许多传统设备耦合, 将鲁班猫板卡丰富的功能,赋予到各种传统的工业设备中。
那么在本讲中,我们可以用Python来编写一些代码,来使用到板卡上的CAN总线资源。
8.2. python-can库¶
8.2.1. python-can库简介¶
python-can是Python库下的一个库包,它实现了CAN总线通讯中许多的通讯操作, 它对不同的硬件设备提供了通用的抽象接口,方便Python开发人员使用该库进行CAN通讯中的数据收发。
我们可以在鲁班猫板卡上安装python-can库, 并通过编写一些测试代码来使用该库,进行基于CAN总线的数据收发实验。
8.3. 实验准备¶
8.3.1. 添加CAN资源¶
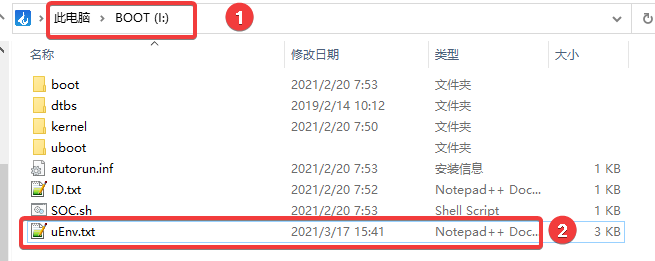
在板卡上的部分资源可能默认未被开启,在使用前请根据需要修改 /boot/uEnv.txt 文件, 可添加对应设备树插件的加载,重启系统,以在系统中添加对应资源。
如本节实验中,通常情况下在鲁班猫系统中默认使能 CAN 的功能,
如大家发现CAN的设备树插件未加载,请做相应修改。
同时如果大家在使用中发现CAN功能引脚被复用或有冲突,请要将对应占用CAN引脚资源的设备树插件取消加载, 否则CAN资源可能无法使用。若已开启对应资源,忽略以下步骤。
本节实验中,笔者使用鲁班猫i.MX6ULL Pro板卡为例演示, 板卡上CAN总线的设备树插件和485总线设备树插件存在引脚冲突, 因此在启用CAN总线设备树插件时,需要关闭485设备树插件。 找到can、485相关设备树插件修改,修改后并重启开发板。
方法参考如下:
添加CAN设备树插件,以使系统支持CAN功能,如下:

# 以鲁班猫i.MX6ULL Pro板卡CAN设备树插件内容为例:
dtoverlay=/usr/lib/linux-image-4.19.35-imx6/overlays/imx-fire-can1.dtbo
如若运行代码时出现“Device or resource busy”或者运行代码卡死等等现象, 请按上述情况检查并按上述步骤操作。
如出现 Permission denied 或类似字样,请注意用户权限,大部分操作硬件外设的功能,几乎都需要root用户权限,简单的解决方案是在执行语句前加入sudo或以root用户运行程序。
在启动文件中添加好设备资源并重启板卡之后,我们可以查看设备是否已经正常添加。
# 在终端中输入如下命令,可以查看到CAN设备资源:
ifconfig -a
检查板卡上的CAN设备资源示例,仅供参考:
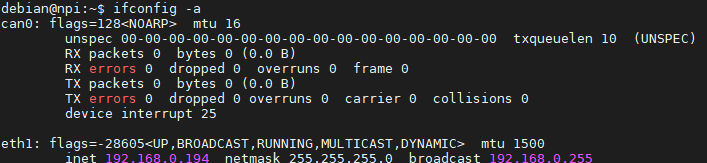
在Linux驱动中,CAN设备被当成网络设备来处理。
关于Linux CAN设备相关内容,参考 《Linux CAN》 。
8.3.2. 硬件连接¶
硬件连接小节,需要大家根据自身开发环境等情况对本章内容进行参考调整。
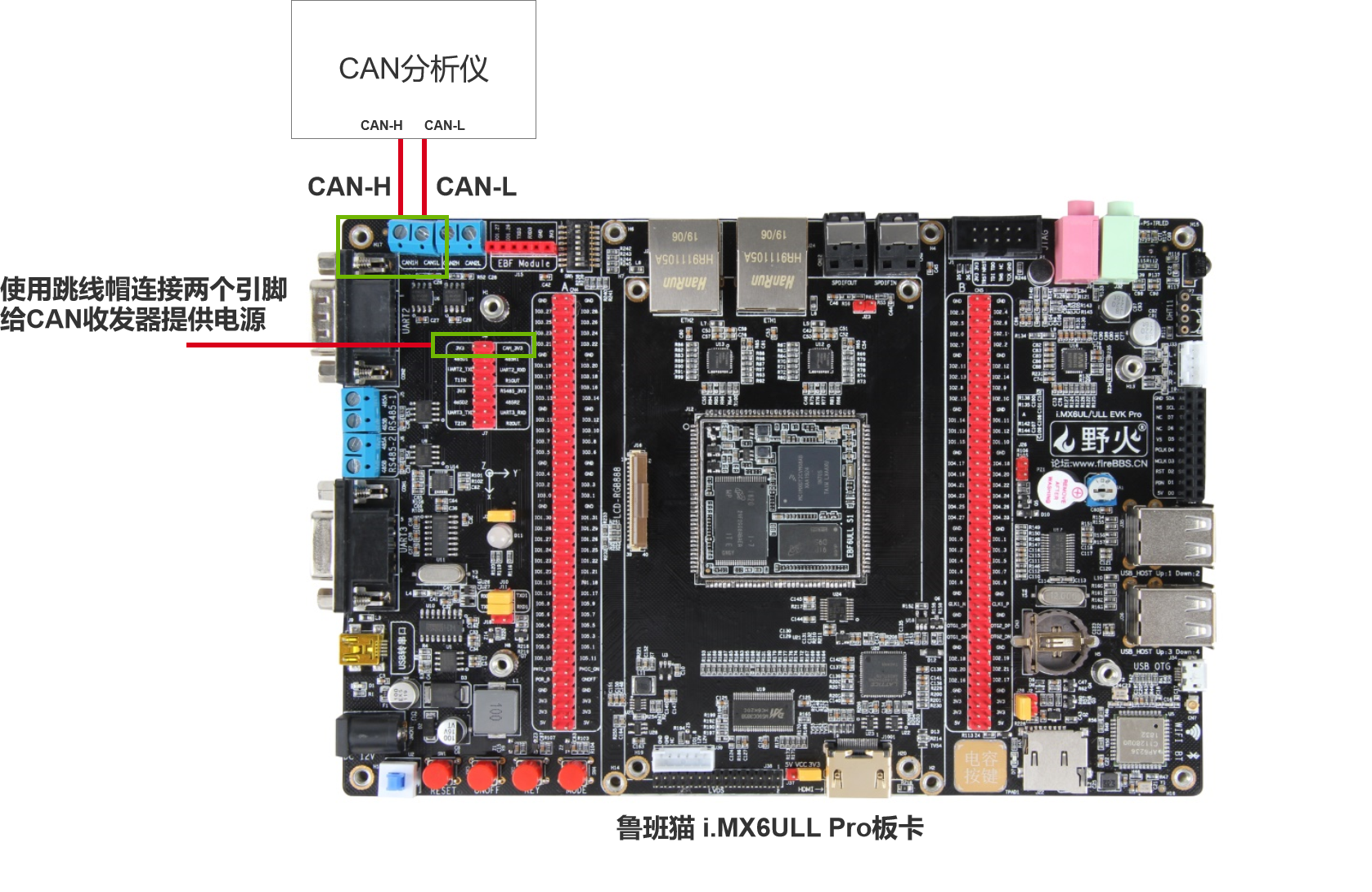
本章中笔者使用CAN分析仪来进行CAN数据通讯的展示,各位根据自身的设备情况调整。 如你手中有两块具有CAN功能的板卡,也可进行通讯实验。
注:CAN分析仪是常见的CAN总线调试仪器,和万用表、示波器的属性一致, 非鲁班猫板卡上板载的设备,大家需要的话请自行购买。
笔者连接如下:
8.3.3. python-can库安装¶
我们使用apt工具安装。
# 在终端中输入如下命令,安装python3-can库:
sudo apt -y install python3-can
等等安装完成后即可。
8.3.4. python-can库使用¶
安装好对应的库之后,我们就可以利用安装好的python3-can库编写一下测试代码。
8.4. 测试代码¶
测试代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 | """ python can 测试 """
import sys
import time
import threading
import can
def msg_recv(device_x):
"接收消息功能"
print("success: msg_recv Thread is running!")
# 将can_mask转换为二进制形式,can_mask中为1的位,用于过滤接收到的帧
# 举例 id: 0 0
# mask: 1 0 则接收到消息的ID中,mask为1对应id中的位,必须与id一致,为0
# 如接收到了四个id的消息 id1: 0 0 此条消息被放行
# id2: 0 1 此条消息被放行
# id3: 1 0 此条消息被过滤
# id4: 1 1 此条消息被过滤
# 过滤器配置示例如下。第一条规则,接收所有标准帧,第二条规则,接收拓展帧中id为0x300的消息。
can_filters = [
{"can_id": 1, "can_mask": 0x0, "extended": False},
{"can_id": 0x300, "can_mask": 0x1FFFFFFF, "extended": True},
]
# 应用过滤器配置
device_x.set_filters(can_filters)
# 查询退出线程是否退出,如果为真,则说明用户期望程序退出,退出本线程循环,线程结束
while tasks_quitThread.is_alive():
try:
# 接收can消息
msg = device_x.recv(1)
if msg is not None:
print("success: ", msg)
except can.CanError:
print("error: 接收消息时出错,请检查设备是否启用及状态正常")
def msg_send(device_x):
"发送消息功能"
print("success: msg_send Thread is running!")
# 构造发送的CAN消息结构,ID为0xC0FFEE,数据内容包含在data中,is_extended_id为拓展ID标识
msg = can.Message(
arbitration_id=0xC0FFEE, data=[0, 25, 0, 1, 3, 1, 4, 1], is_extended_id=True
)
# 查询退出线程是否退出,如果为真,则说明用户期望程序退出,退出本线程循环,线程结束
while tasks_quitThread.is_alive():
try:
# 发送构造的CAN消息
device_x.send(msg)
# 打印发送提示
print(f"success: 消息已发送至 {device_x.channel_info}")
except can.CanError:
print("error: 消息发送出错,请检查设备是否启用及状态正常!")
# 两秒后再次发送
time.sleep(2)
def tasks_quit():
"程序退出功能"
print("success: tasks_quit Thread is running!")
exitright = "e"
while exitright not in ["q", "Q"]:
# 获取用户输入,如果为q则退出程序
exitright = input(
"""
***********************************
**输入字母q后,按下回车以退出程序**
***********************************
"""
)
# 线程退出
# 打印运行程序前提示信息
print(
"information: 执行本程序前,请先启用can设备。命令如下:\
\nsudo ip link set can0 type can bitrate 1000000\nsudo ip link set can0 up"
)
# 打开CAN设备,CAN设备类型为socketcan,channel为can0,可使用ifconfig -a命令查看。
with can.interface.Bus(
bustype="socketcan", channel="can0", bitrate=1000000
) as device_can0:
# 创建线程:监听程序退出线程、发送can消息线程、接收can消息线程
try:
print("information: 开始创建 tasks_quitThread 线程!")
tasks_quitThread = threading.Thread(target=tasks_quit, daemon=True)
print("information: 开始创建 msg_sendThread 线程!")
msg_sendThread = threading.Thread(
target=msg_send, daemon=True, args=(device_can0,)
)
print("information: 开始创建 msg_recvThread 线程!")
msg_recvThread = threading.Thread(
target=msg_recv, daemon=True, args=(device_can0,)
)
# 开启线程
print("information: 开始启动 tasks_quitThread 线程!")
tasks_quitThread.start()
print("information: 开始启动 msg_sendThread 线程!")
msg_sendThread.start()
print("information: 开始启动 msg_recvThread 线程!")
msg_recvThread.start()
except:
print("error: 创建或启动线程中出错!")
sys.exit()
# 等待线程结束
tasks_quitThread.join()
print("information: tasks_quitThread结束")
msg_sendThread.join()
print("information: msg_sendThread结束")
msg_recvThread.join()
print("information: msg_recvThread结束")
# 所有正常线程结束,退出程序
sys.exit()
|
代码功能已经在注释中详细给出。
8.4.1. 实验步骤¶
在测试代码前,我们需要将CAN总线设备启动,在前面我们说过Linux下CAN设备被当成网络设备处理。
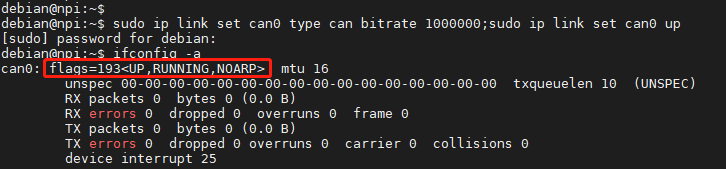
CAN总线设备未启动时,状态为 NOARP :

所以我们可以输入如下命令来启用CAN总线设备:
# 在终端中输入如下命令,可以启用CAN总线设备:
sudo ip link set can0 type can bitrate 1000000;sudo ip link set can0 up
该命令的作用是设置CAN设备的通讯速率为1Mbps,并启动CAN设备。
重要
CAN设备的波特率以终端输入命令配置的为准!Python代码中配置的波特率需要与终端输入保持一致! 否则可能会出现意料之外的效果。
启动后,状态为 UP,RUNNING,NOARP ,图如下:
下面我们开始运行测试代码。请先将配套代码文件夹io\canbus_test\下,再运行程序。
编写的测试代码示例中,我们的CAN设备会监听CAN总线上所有的CAN标准帧,监听帧头为0x300的拓展帧。
所以我们可以运行代码来查看一下现象。
# 在终端中输入如下命令:
python3 canbus_test.py
运行程序后,终端打印出程序运行信息:
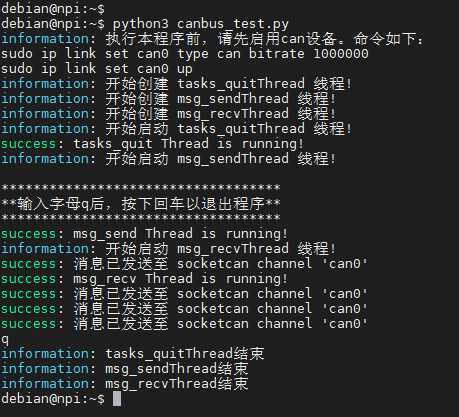
程序里创建了三个线程,分别用于监控程序退出、间隔2秒发送一次CAN消息到总线上、 监听总线上对应的数据。
程序运行后,就可以在CAN分析仪中查看到对应的数据包了:
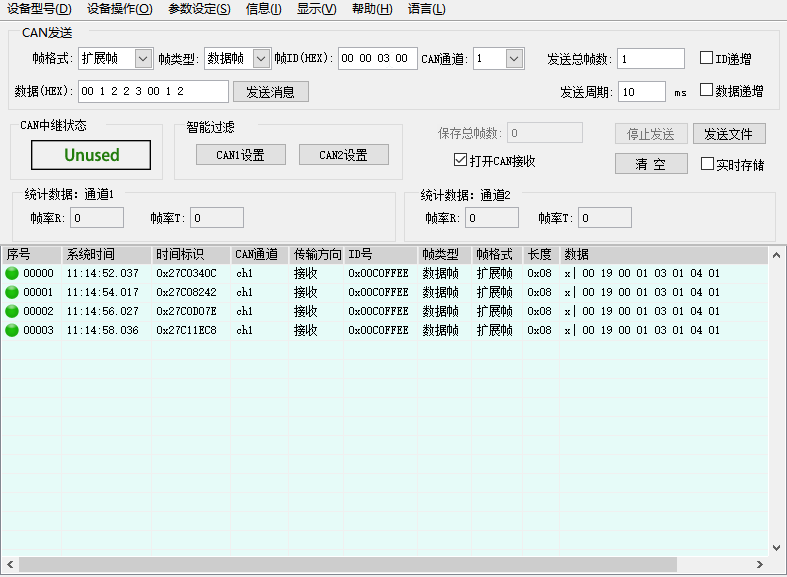
下面我们尝试使用CAN分析仪发送CAN数据包到总线上,看我们鲁班猫板卡上的CAN设备是否会监听到消息。
实验现象如下(点击图片可放大):
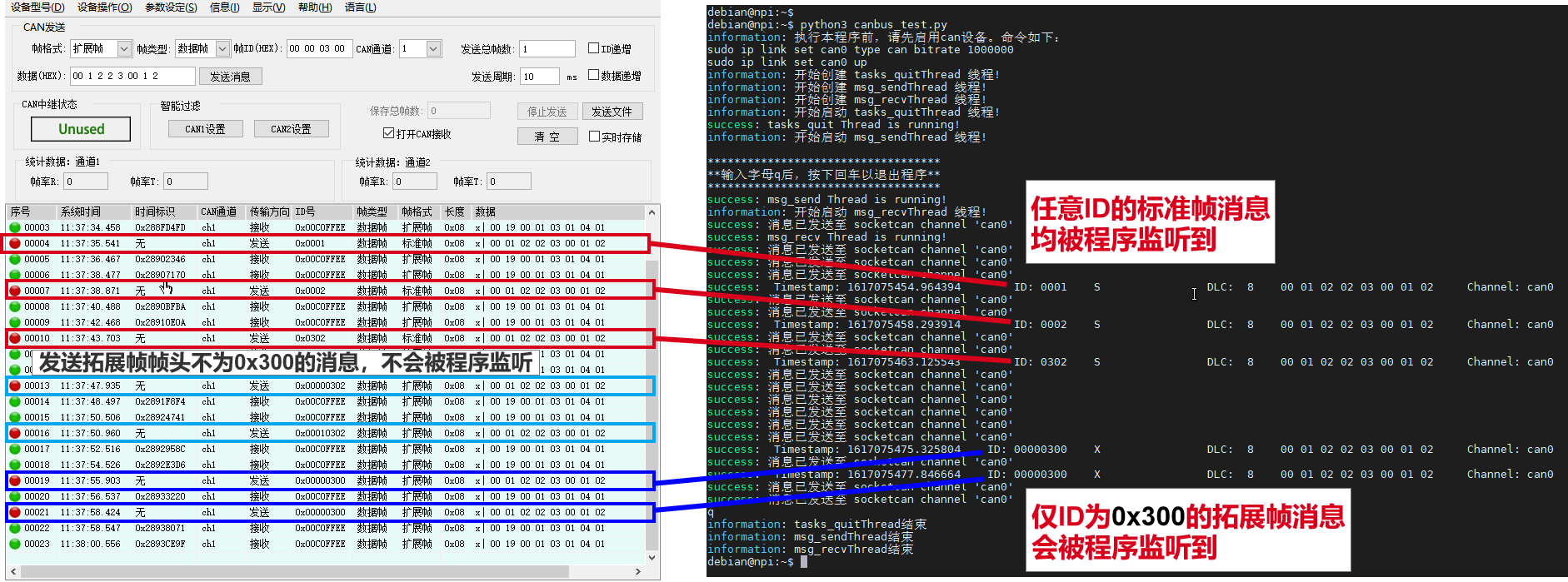
根据图片中的文字说明,大家就可以知道,实现现象与我们的程序设计是一致的了!
更多关于python-can库的使用,可参考 python-can库说明文档 。 还可以上作者的Github仓库学习更多内容, python-can Github 。