10. 控制IO(GPIO子系统)¶
本章讲解Linux GPIO子系统驱动相关应用层程序的控制原理。
本章的示例代码目录为:base_code/linux_app/gpio。
10.1. GPIO子系统¶
GPIO是General Purpose I/O的缩写,即通用输入输出端口,简单来说就是MCU/CPU可控制的引脚,这些引脚通常有多种功能,最基本的是高低电平输入检测和输出,部分引脚还会与主控器的片上外设绑定,如作为串口、I2C、网络、电压检测的通讯引脚。
与LED子系统类似,Linux提供了GPIO子系统驱动框架,使用该驱动框架可以把CPU的GPIO引脚导出到用户空间,用户通过访问/sys文件系统进行控制,GPIO子系统支持把引脚用于基本的输入输出功能,其中输入功能还支持中断检测。在Linux内核源码的“Documentation/gpio”目录可找 到关于GPIO子系统的说明。
通过GPIO子系统可以控制LED、IO以及按键检测这类硬件设备,不过由于本开发板出厂的默认镜像中,LED灯使用了LED子系统驱动控制,按键使用了input输入子系统驱动控制,不方便在用户空间使用GPIO的方式进行实验,而IO在驱动层中我们是使用GPIO子系统的,本章选择40pin引脚上的gpio作为示例讲解。
实验时可使用电压表检测对应引脚的电平输出。
10.2. 引脚编号转换¶
与LED驱动设备不一样,LED已经在内核驱动(设备树)绑定了具体引脚的端 口号,最终直接以设备名字导出到用户空间,所以控制时只要通过设备文件即可 控制,而不需要知道具体的硬件连接。使用GPIO子系统时,需要用户自主控制导出 使用哪个引脚,所以我们要根据确定哪个IO来进行实验。
如下图:
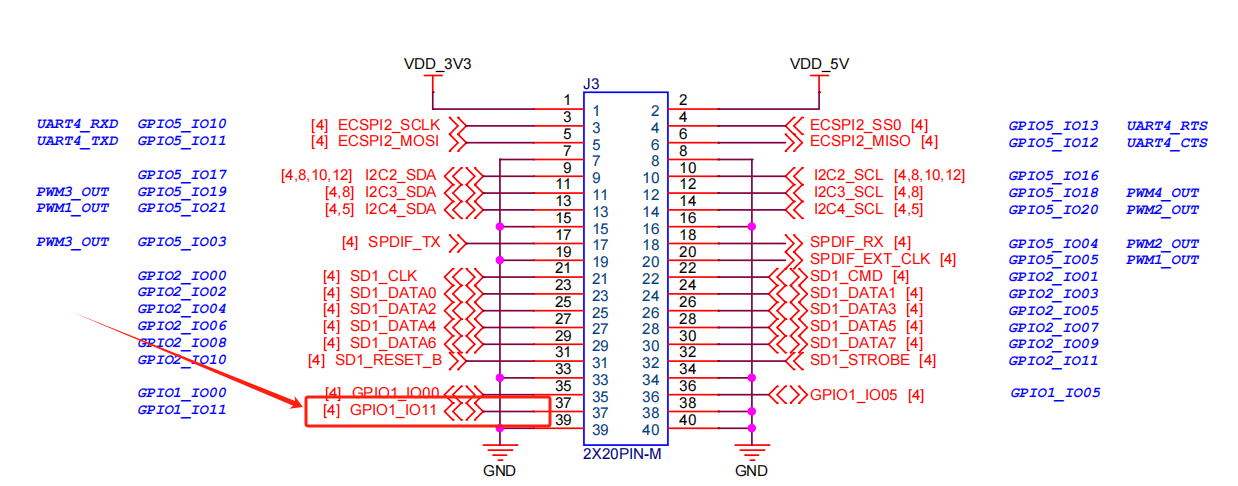
从上图,选定GPIO1_11引脚进行实验。
i.MX8MMini芯片GPIO引脚名格式通常为GPIOn_IOx,如此处的GPIO1_11或GPIO5_IO10等等,其 中n是端口号,x为该组端口的引脚号,本开发板采用的芯片有1~5组端口,每组端口包含的引脚从0~31不等。 本开发板中export文件使用的编号index与GPIO引脚名的转换关系如下:
index = GPIOn_IOx = (n-1)*32 + x
例如IO使用的引脚编号为:index = GPIO1_11 = (1-1)*32 +11 = 11。
又例如GPIO5_IO10的编号为:index = GPIO5_IO10 = (5-1)*32+10=138。
要注意并不是所有的引脚都能通过export文件导出到用户空间的,需要没有被占用的IO。
10.2.1. GPIO设备目录¶
GPIO驱动子系统导出到用户空间的目录是“/sys/class/gpio”。
可使用如下命令查看:
1 2 3 4 5 6 7 8 9 10 11 12 | #在主机或开发板的终端使用以下命令查看
ls -lh /sys/class/gpio
#以下命令不支持在Ubuntu主机上运行
#导出GPIO到用户空间
echo 11 > /sys/class/gpio/export
#查看目录的变化,增加了gpio11目录
ls /sys/class/gpio/
#把gpio11从用户空间中取消导出
echo 11 > /sys/class/gpio/unexport
#查看目录变化,gpio11目录消失了
ls /sys/class/gpio/
|
如下图:

该目录下的主要内容说明如下:
export文件:导出GPIO,该文件只能写不能读,用户向该文件写 入GPIO的编号N可以向内核申请将该编号的GPIO导出到用户空间,若内核本 身没有把该GPIO用于其它功能,那么在/sys/class/gpio目录下会新增一 个对应编号的gpioN目录,如上图一导出了gpio11。
unexport文件:export的相反操作,取消导出GPIO,该文件同样只能 写不能读。上图演示了往unexport写入11后,gpio11目录消失了。
gpiochipX目录:该目录是指GPIO控制器外设,Ubuntu主机上默认没有这样的功能。
gpioN目录:通过export导出的具体GPIO引脚的控制目录,如上图中的gpio11目录下会包含有 控制该引脚的相应文件。
10.2.2. GPIO设备属性¶
gpioN目录下相关的设备文件,可以使用以下命令查看:
1 2 3 4 5 | #在开发板的终端使用以下命令
#导出编号为11的GPIO
echo 11 > /sys/class/gpio/export
#查看gpio11目录下的内容
ls /sys/class/gpio/gpio11/
|
如下图:

常用的属性文件介绍如下:
direction文件:表示GPIO引脚的方向,它的可取值如下:
in:引脚为输入模式。
out:引脚为输出模式,且默认输出电平为低。
low:引脚为输出模式,且默认输出电平为低。
high:引脚为输出模式,且默认输出电平为高。
value文件:表示GPIO的电平,1表示高电平,0表示低电平。GPIO被配置为输出 模式, 那么修改该文件的内容可以改变引脚的电平。
edge文件:用于配置GPIO的中断触发方式,当GPIO被配置为中断时,可以通过系统 的poll函数监听。edge文件可取如下的属性值:
none:没有使用中断模式。
rising:表示引脚为中断输入模式,上升沿触发。
falling:表示引脚为中断输入模式,下降沿触发。
both:表示引脚为中断输入模式,边沿触发。
与LED子系统不同,当某个引脚被用于具体的LED设备时,该引脚会被设备占用,它的 功能在用户空间是无法再被修改的,而使用GPIO子系统的设备则可以在用户空间灵活配置作为输入、输出或中断模式。
只要我们知道IO的GPIO引脚编号,就可以就可以通过它导出的direction、value文件 控制引脚输出高低电平,从而控制它发声了。当然,如果硬件上临时把该引脚修改为按键 高低电平检测,此时也可以通过这些文件把引脚改为输入模式使用,而不需要修改Linux内核驱动。
10.3. 控制IO(Shell)¶
下面使用命令行控制IO,讲解GPIO子系统设备属性的应用。
由于在Ubuntu主机通常无法导出GPIO,请在开发板上执行以下命令测试,测试前需确保当前用户为root用户:
1 2 3 4 5 6 7 8 9 10 11 | #以下命令在开发板上执行
#导出IO使用的GPIO到用户空间
echo 11 > /sys/class/gpio/export
#确认出现了gpio11设备目录
ls /sys/class/gpio/
#控制gpio11方向为输出
echo out > /sys/class/gpio/gpio11/direction
#控制gpio11输出高电平
echo 1 > /sys/class/gpio/gpio11/value
#控制gpio11输出低电平
echo 0 > /sys/class/gpio/gpio11/value
|
如下图:

命令执行的原理非常简单:
把IO的编号写入到export文件,导出GPIO设备。
修改IO设备属性direction文件值为out,把GPIO设置为输出方向。
修改IO设备属性文件value的值为1或0,控制IO电平。
10.4. 控制IO(系统调用)¶
类似地,也可以通过系统调用的文件操作方式控制IO。
工程中的gpio_bsp.c文件包含了控制IO相关的函数,见如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 | #include <string.h>
#include <sys/stat.h>
#include <unistd.h>
#include <fcntl.h>
#include "includes/bsp_gpio.h"
int gpio_init(void)
{
int fd;
//index config
fd = open("/sys/class/gpio/export", O_WRONLY);
if(fd < 0)
return 1 ;
write(fd, gpio_GPIO_INDEX, strlen(gpio_GPIO_INDEX));
close(fd);
//direction config
fd = open("/sys/class/gpio/gpio" gpio_GPIO_INDEX "/direction", O_WRONLY);
if(fd < 0)
return 2;
write(fd, "out", strlen("out"));
close(fd);
return 0;
}
int gpio_deinit(void)
{
int fd;
fd = open("/sys/class/gpio/unexport", O_WRONLY);
if(fd < 0)
return 1;
write(fd, gpio_GPIO_INDEX, strlen(gpio_GPIO_INDEX));
close(fd);
return 0;
}
int gpio_on(void)
{
int fd;
fd = open("/sys/class/gpio/gpio" gpio_GPIO_INDEX "/value", O_WRONLY);
if(fd < 0)
return 1;
write(fd, "1", 1);
close(fd);
return 0;
}
int gpio_off(void)
{
int fd;
fd = open("/sys/class/gpio/gpio" gpio_GPIO_INDEX "/value", O_WRONLY);
if(fd < 0)
return 1;
write(fd, "0", 1);
close(fd);
return 0;
}
|
该代码说明如下:
gpio_init函数:它使用了open、write、close等函数修改export和gpioN/direction文件,初始 化IO使用的引脚为输出模式。
gpio_deinit函数:向unexport文件写入编号,取消导出。
gpio_on和gpio_off函数:往gpioN/value文件写入1和0,控制引脚输出高低电平。
本代码要特别注意的是export和unexport文件是只有写权限的,所以通过open打开时要 使用“O_WRONLY”标志以写入方式打开,不能使用“O_RDWR”等带读模式的标志。
10.4.1. 主文件¶
编写完 IO的控制函数后,就可以在 main 函数中测试了,如下所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 | #include <stdio.h>
#include <unistd.h>
#include "includes/bsp_gpio.h"
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(int argc, char *argv[])
{
char buf[10];
int res;
printf("This is the gpio demo\n");
res = gpio_init();
if(res){
printf("gpio init error,code = %d",res);
return 0;
}
while(1){
printf("Please input the value : 0--off 1--on q--exit\n");
scanf("%10s", buf);
switch (buf[0]){
case '0':
gpio_off();
break;
case '1':
gpio_on();
break;
case 'q':
gpio_deinit();
printf("Exit\n");
return 0;
default:
break;
}
}
}
|
在 main 函数中,调用我们前面定义的gpio_init初始化IO使用的GPIO,然后使用scanf检测用 户输入,根据用户输入调用对应的函数控制IO。
10.4.2. 编译及测试¶
本实验使用的Makefile相对于前面的章节仅修改了最终的可执行文件名为gpio_demo。
本实验不支持在Ubuntu主机上进行。
对于ARM64架构的程序,可使用如下步骤进行编译:
1 2 3 | #在主机的实验代码Makefile目录下编译
#编译arm64平台的程序
make ARCH=arm64
|
编译后生成的arm64平台程序为build_arm64/gpio_demo,使用网络文件系统共 享至开发板,在开发板的终端上运行该程序测试即可。
如下图:

程序执行后会提示输入,在终端输入1并回车后IO会响,输入0并回车后IO不响。